


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Kickback is one of the most dangerous mechanical phenomena in rotating power tools such as drills, grinders, and rotary tools. It occurs when the tool suddenly jams, transferring torque violently back to the body of the tool and the user’s hands. This can cause serious injuries, loss of control, and equipment damage.
This project presents a smart anti-kickback safety system built using Arduino Nano 33 BLE Sense and its onboard IMU (gyroscope + accelerometer). The system continuously analyzes the dynamic motion of the drill in real time and automatically cuts the power when a dangerous mechanical pattern is detected.
This is not a simple sensor project — it is a real-time safety system that combines physics-based detection, signal processing, and embedded decision logic.
Core IdeaInstead of monitoring electrical parameters like current or voltage, this system analyzes the physical behavior of the drill:
Angular velocity
- Angular velocity
Angular acceleration
- Angular acceleration
Sudden speed drop
- Sudden speed drop
Dynamic instability
- Dynamic instability
Kickback is treated as a mechanical signature, not a single sensor spike.
System ArchitectureThe system is built on four functional layers:
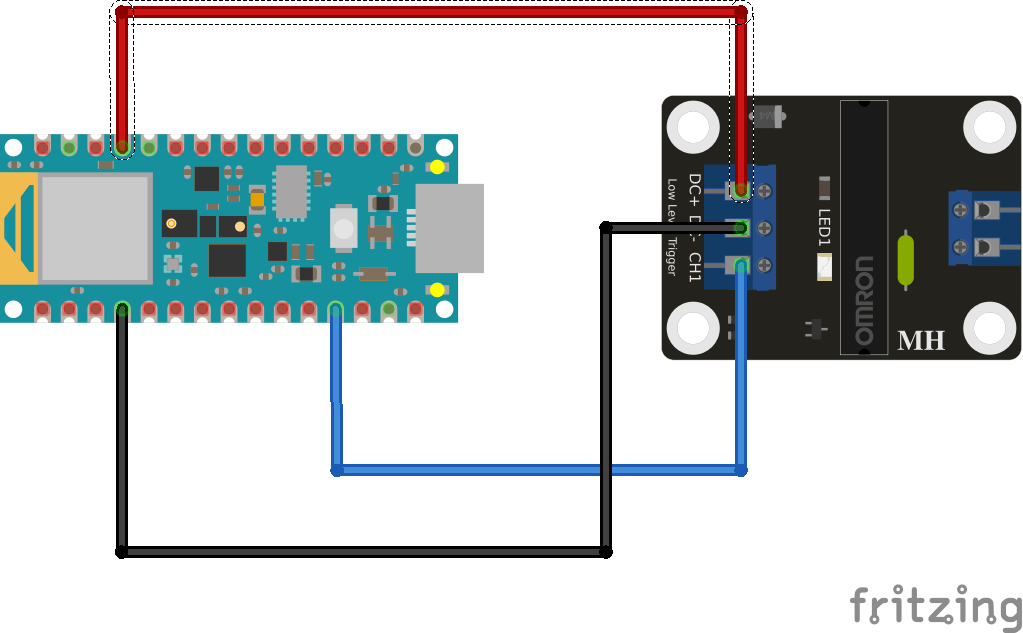
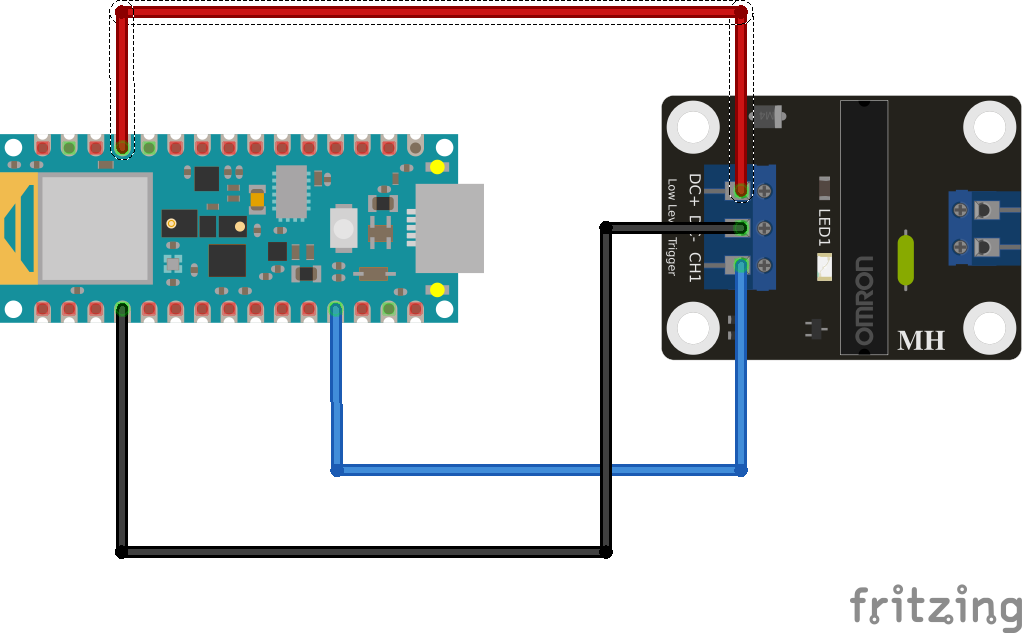
1. Sensing LayerArduino Nano 33 BLE Sense (LSM9DS1 IMU)
2. Processing LayerSignal filtering + derivative calculation
3. Decision LayerMulti-condition logic engine
4. Power LayerRelay / power cutoff system
Why IMU-Based Detection?Kickback is a dynamic mechanical event. It cannot be reliably detected using only electrical measurements.
The IMU allows the system to observe:
Sudden angular acceleration (shock)
- Sudden angular acceleration (shock)
Directional instability
- Directional instability
Rotational speed collapse
- Rotational speed collapse
This provides a physics-level view of the tool’s behavior.
Detection LogicThe system triggers power cutoff only when all conditions are met:
Real rotational motion is present
- Real rotational motion is present
Extreme angular acceleration is detected
- Extreme angular acceleration is detected
Sudden rotational speed drop occurs
- Sudden rotational speed drop occurs
System is armed and stable
- System is armed and stable
This multi-condition logic prevents:
False triggers
- False triggers
Noise activation
- Noise activation
Vibration-based errors
- Vibration-based errors
Startup glitches
- Startup glitches
IMU sampling at high frequency
- IMU sampling at high frequency
Low-pass filtering
- Low-pass filtering
Angular velocity calculation
- Angular velocity calculation
Angular acceleration (derivative)
- Angular acceleration (derivative)
Multi-axis logic evaluation
- Multi-axis logic evaluation
Safety decision
- Safety decision
Power cutoff latch
- Power cutoff latch
This system follows fail-safe principles:
Latched cutoff mode
- Latched cutoff mode
Warm-up arming phase
- Warm-up arming phase
Sensor calibration
- Sensor calibration
Noise filtering
- Noise filtering
State-based logic
- State-based logic
The goal is not just detection — it is predictable safe behavior.
Power Isolation LayerSafety systems are meaningless without proper power design.
In this project:
Signal and power paths are isolated
- Signal and power paths are isolated
High-current relay is used
- High-current relay is used
Control electronics are protected
- Control electronics are protected
Industrial versions can use:
SSRs
- SSRs
MOSFET drivers
- MOSFET drivers
IGBTs
- IGBTs
EMI filters
- EMI filters
snubber circuits
- snubber circuits
The system was tested on a Bosch electric drill under:
Bit jamming conditions
- Bit jamming conditions
Sudden mechanical impacts
- Sudden mechanical impacts
Directional shocks
- Directional shocks
Load spikes
- Load spikes
In all cases, the system successfully detected dangerous patterns and cut power in real time.
ApplicationsThis architecture can be extended to:
Grinders
- Grinders
Rotary tools
- Rotary tools
Handheld CNC tools
- Handheld CNC tools
Industrial handheld machines
- Industrial handheld machines
Smart power tools
- Smart power tools
Safety robotics
- Safety robotics
Industrial machinery protection
- Industrial machinery protection
This project demonstrates:
Embedded real-time safety systems
- Embedded real-time safety systems
Physics-based detection models
- Physics-based detection models
Intelligent tool protection
- Intelligent tool protection
Industrial safety architecture concepts
- Industrial safety architecture concepts
Sensor fusion logic design
- Sensor fusion logic design
Safety is not a feature. It is an architecture.
When sensing, processing, logic, physics, power, and control are combined, a system is created — not a gadget.
This project represents a step toward smart industrial safety systems for next-generation power tools.


{kind=link}
Comments