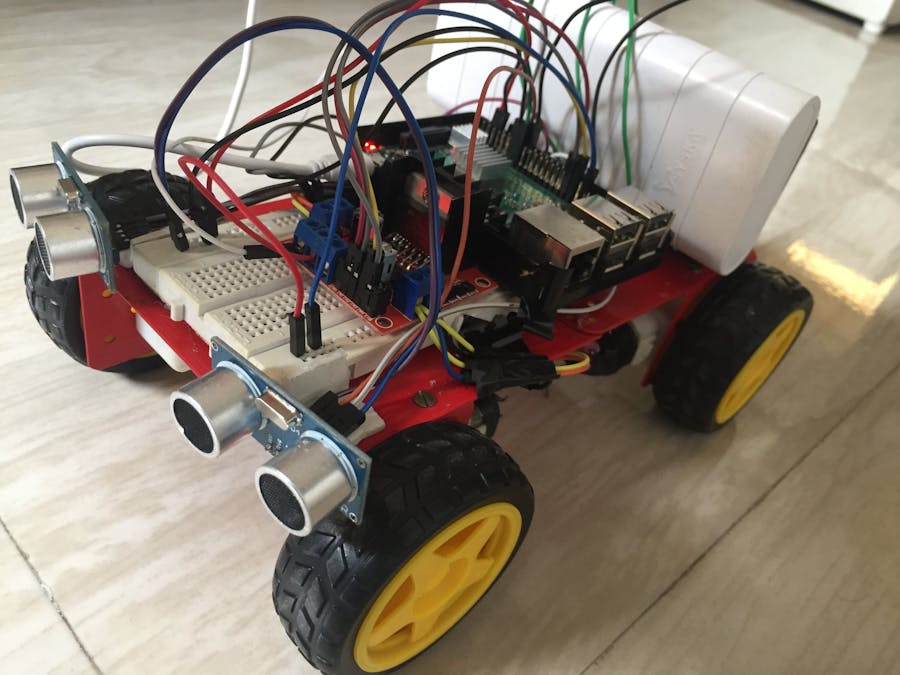
Robots are machines which reduce the human efforts in heavy works by automating the tasks in industries, factories, hospitals etc. Most of the car are run by using some control unit or components like a push button, remote, joystick, PC, gestures and by executing some command by using controller or processor. But today we are here with a Automatic car which moves autonomously without any external events avoiding all the obstacle in its path, yes we talking about Obstacle Avoiding Car. In this project, we have used Raspberry Pi and Motor driver to drive the Car and Ultrasonic sensor for detecting objects in the path of car.
How it works:
Working of this Autonomous Car is very easy. When the car is powered on and starts running, Raspberry Pi measures the distances of objects, in front of it, by using Ultrasonic Sensor Module and stores in a variable. Then RPi compares this value with predefined values and take decisions accordingly to move the car Left, Right, Forward, or backward.
Here in this project, we have selected 15cm distance for taking any decision by Raspberry Pi. Now whenever Raspberry Pi gets less than the 15cm distance from any object then Raspberry Pi stops the car and moves it back and then turns it left or right. Now before moving it forward again, Raspberry Pi again checks whether any obstacle is present within the range of 15 cm distance, if yes then again repeats the previous process, else move the car forward until it will detect any obstacle or object again.















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments