Hand-wash timer :This is a simple hand-wash timer made using Arduino Uno, Ultrasonic sensor and Servo motor. The Ultrasonic sensor detects if someone has come to wash their hands. The servo motor receives this signal from the Ultrasonic sensor and starts ticking for 20 seconds. Such a visual display will help to motivate people to wash their hands for 20 seconds. Check this video out to understand the working of this hand-wash timer.
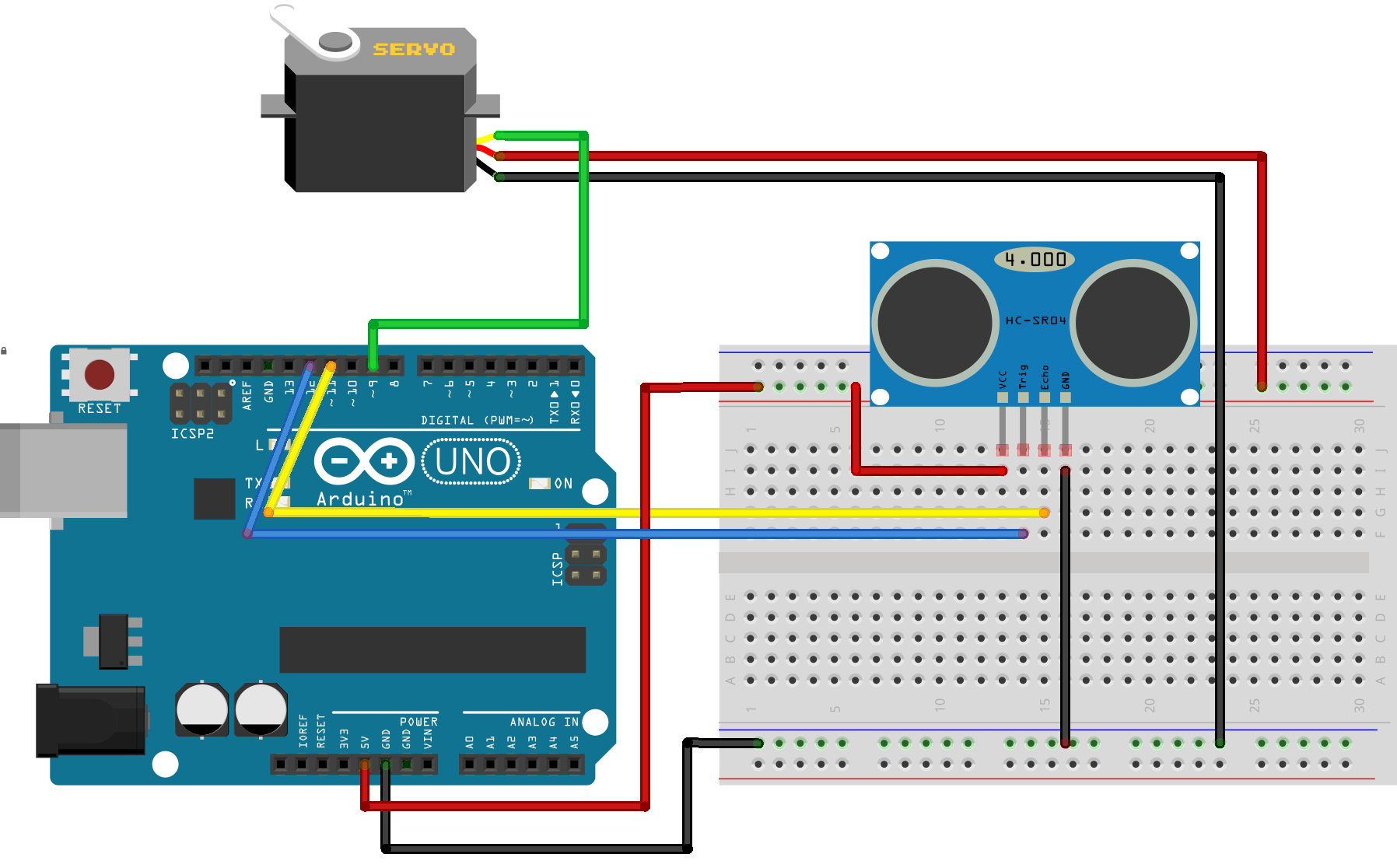
Connections:For the Servo Motor, the connections are
- Red Servo Wire to Vin on the Arduino
- Black Servo Wire to GND on the Arduino
- Orange Servo Wire to Pin 7 on the Arduino
For the Ultrasonic sensor, the connections are
- VCC to 5V on the Arduino
- Trig to Pin 9 on the Arduino
- GND to GND on the Arduino
- Echo to Pin 10 on the Arduino
Create the timer by hot-gluing a pointer to the servo. You can customize the timer as you want. You can find out my version of the timer in the video above. I think you will get a fair enough idea of how you should built the setup, once you have seen the video.



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
















{kind=link}
{kind=link}
Comments