


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 2 | ||||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
Like many people, my wish is a nice model train, therefore I made a nice layout plan, bought a starter set, made a table etc. It takes a long time, of course, to build a complicated layout and in the meantime you want to (test)ride on the track you have so far.
You can of course do so just with your transformer, but if you do not pay attention you drive off the track. And model trains are fragile, a drop on the floor will do damage. So the plan is a back and forth automation. Something like this: Arduino-railroad.
All due respect to the maker but if you pop each time against a fence and reverse the motor directly, it will damage the train or the gear at some time.
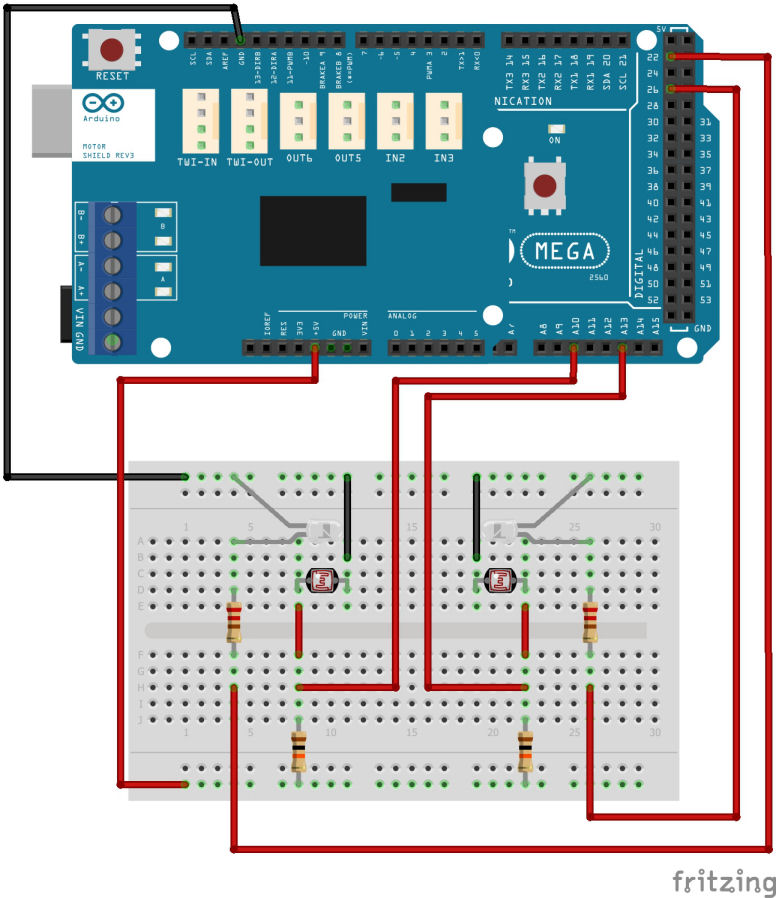
I figured two gates with an LED and an LDR will sense the train.
And let the Arduino decelerate, reverse and accelerate the train.
Train Control
C/C++The pin numbers of motor control are fixed.
/*
Train control
This code is developed to "test" drive
a model train between two gates made of a LED and LDR.
Parts required:
1 - arduino uno/mega or compatible
1 - arduino motor shield R3
2 - Led brite white (5mm)
2 - Ldr (A 9013 photo resistor 5mm)
2 - 10K resistor
2 - 220 Ohm resistor
1 - model train
Created 4 October 2016
by Kitemasters
This code is part of the public domain
*/
// --------CONSTANTS (won't change)---------------
int sens_L_Pin = A4; // the pin number for ldr L
int sens_R_Pin = A5; // the pin number for ldr R
int led_L_Pin = 4; // the pin number for the L LED
int led_R_Pin = 5; // the pin number for the R LED
int motor_Pin = 3; // the pin number for the motor speed
int brake_Pin = 9; // the pin number for the motor brake
int direction_Pin = 12; // the pin number for the motor direction
int current_sens_Pin = A0; // the pin number for the current sensor
int read_sens_Interval = 200; // millisecs between reading sensors
int motor_Acc_Interval = 100; // millisecs between acceleration steps
int motor_Dec_Interval = 10; // millisecs between deceleration steps
//------------ VARIABLES (will change)---------------------
unsigned long currentMillis = 0; // stores the value of millis() in each iteration of loop()
unsigned long previous_sens_Millis = 0; // will store the last time sensors are read
unsigned long previous_Acc_Millis = 0; // will store time of last acceleration step
unsigned long previous_Dec_Millis = 0; // will store time of last deceleration step
int sensLreading = 0; // declare variable and set value for left sensor reading
int sensRreading = 0; // declare variable and set value for right sensor reading
int max_Speed = 200; // declare variable and set value for maximum Speed (0 to 255)
int Speed = 0; // declare variable and set value for current Speed (0 to 255)
boolean direct = HIGH; // declare variable and set value for direction to HIGH (HIGH = left)
#define STATE_START 1 // declare value 0 to be STATE_START
#define STATE_RUN 2 // declare value 1 to be STATE_RUN
#define STATE_DECELERATE 3 // declare value 2 to be STATE_DECELERATE
#define STATE_TURN 4 // declare value 3 to be STATE_TURN
#define STATE_ACCELERATE 5 // declare value 4 to be STATE_ACCELERATE
int state = STATE_START; // declare variable "state" and set value to STATE_START
//========================================
void setup() {
Serial.begin(9600);
pinMode(led_L_Pin, OUTPUT); // set led_L_Pin as output
pinMode(led_R_Pin, OUTPUT); // set led_R_Pin as output
pinMode(motor_Pin, OUTPUT); // set motor_Pin as output
pinMode(brake_Pin, OUTPUT); // set brake_Pin as output
pinMode(direction_Pin, OUTPUT); // set direction_Pin as output
pinMode(sens_L_Pin, INPUT); // set sens_L_Pin as input
pinMode(sens_R_Pin, INPUT); // set sens_R_Pin as input
pinMode(current_sens_Pin, INPUT); // set current_sens_Pin as input
}
//========================================
void loop() {
currentMillis = millis(); // store the latest value of millis()
read_sens(); // read the sensors
switch (state) // state switch
{
case STATE_START:
Start();
break;
case STATE_ACCELERATE:
Accelerate();
break;
case STATE_DECELERATE:
Decelerate();
break;
case STATE_TURN:
Turn();
break;
case STATE_RUN:
break;
}
}
//========================================
void read_sens() {
if (currentMillis - previous_sens_Millis >= read_sens_Interval) { // time is up, so read sensors
previous_sens_Millis = currentMillis; // because shooter and Koepel told me so.// save the time we last read sensors
sensLreading = analogRead(sens_L_Pin); // read left ldr (high value means the light is off or blockt)
sensRreading = analogRead(sens_R_Pin); // read right ldr (high value means the light is off or blockt)
if (sensLreading > 200 && direct == HIGH) { // if conditions are throu, the train reached left gate***
digitalWrite(led_L_Pin, LOW); // turn left LED off
digitalWrite(led_R_Pin, HIGH); // turn right LED on
state = STATE_DECELERATE; // set state to "decelerate"
previous_Dec_Millis = currentMillis; // set previous_Dec_Millis to current time
}
if (sensRreading > 200 && direct == LOW) { // if conditions are throu, the train reached right gate***
digitalWrite(led_R_Pin, LOW); // turn right LED off
digitalWrite(led_L_Pin, HIGH); // turn left LED on
state = STATE_DECELERATE; // set state to "decelerate"
previous_Dec_Millis = currentMillis; // set previous_Dec_Millis to current time
}
}
}
//========================================
void Start() {
digitalWrite(led_L_Pin, HIGH); // turn left led on
digitalWrite(brake_Pin, LOW); // Disengage the Brake
digitalWrite(direction_Pin, direct); // Establishes direction of the train
state = STATE_ACCELERATE; // set state to "accelerate"
previous_Acc_Millis = currentMillis; // set previous_Acc_Millis to current time
}
//========================================
void Accelerate() {
if (currentMillis - previous_Acc_Millis >= motor_Acc_Interval) { // check interval time
previous_Acc_Millis = currentMillis; // because shooter and Koepel told me so.//last time of acceleration step
Speed = Speed + 1; // add 1 to speed
analogWrite(motor_Pin, Speed); // send Speed to motor_Pin
if (Speed == max_Speed) { // if speed reach max speed
state = STATE_RUN; // set state to "run"
}
}
}
//========================================
void Decelerate() {
if (currentMillis - previous_Dec_Millis >= motor_Dec_Interval) { // check interval time
previous_Dec_Millis = currentMillis; // because shooter and Koepel told me so.//last time of acceleration step
Speed = Speed - 1; // subtract 1 of speed
analogWrite(motor_Pin, Speed); // send Speed to motor_Pin
if (Speed == 0) { // if speed reach 0
state = STATE_TURN; // set state to "turn"
}
}
}
//========================================
void Turn() {
if (direct == HIGH) { // flip direction
direct = LOW;
digitalWrite(direction_Pin, direct); // establishes right direction of train
}
else {
direct = HIGH;
digitalWrite(direction_Pin, direct); // establishes left direction of train
}
state = STATE_ACCELERATE; // set state to "accelerate"
previous_Acc_Millis = currentMillis; // set previous_Acc_Millis to current time
}
//========================================END


{kind=link}
Comments