


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 6 | |||
 |
| × | 1 | |||
 |
| × | 6 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Pull-ups are the most easy, usual and effective to become strong and healthy.
If you start a workout, you will track your progress- with a sheet of papers, Excel or other stuff... But Geekturnik will count your results!
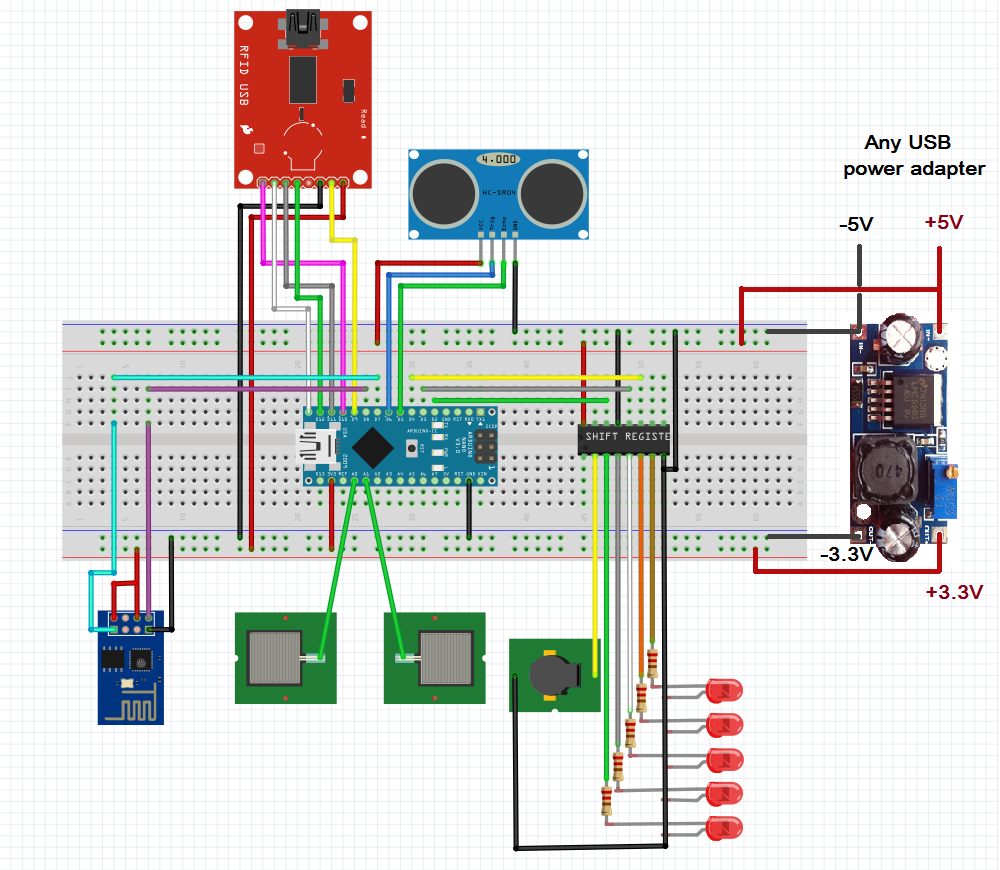
Geekturnik ("turnik" means "pull-up bar" in Russian) is consist of the following components:
- 2 capacitive sensors inside of pull-up bar grips- they triggers on/off when you touch or release grips
- Ultrasonic sensor HC-SR04, fixed in the middle of pull-up bar- to count exercises and time to execute each of them, and total set of pull-ups
- RFID reader RC-522- to identify sportsman (you could authorize on the device to track you individual progress, and the same for your family members)
- 6 LEDs with different colors to show device status- such as wi-fi connection status, upload to thingspeak.com status, to mark each completed pull-up and more. I've decided to use LEDs before LCD screen, but now I think it's unnecessary.
- Buzzer to mark each completed pull-up with short beep
- 220 Ohm resistors to connect LEDs with IC output pins.
- Integrated circuit NXP 74HC595N (shiftout register)- to manage all LEDs and buzzer and to leave some Arduino pins to connect other devices. It's make connection to 6 LEDs and buzzer with only 3 pins.
- Arduino Uno (to test device on the breadboard), but for final device it's better to use Arduno Nano- it's easier to insert it into case, and to solder it to the PCB
And here I would like to say "foooooo" to Russian custom service, which decides to decline delivering of MKR-1000 to me :-( So, I have to use some additional devices instead of integrated WiFi:
- ESP 8266-01 as an external WiFi adapter
- DC-DC converter down to 3.3V. ESP 8266 needs 3.3V power source (5V will create a small brazier on top of the IC), and the same for data transmission.... and it's voracious. It's needs about 300-500mA during transmission, so it's impossible to power it up using only 3.3V output on Arduino Nano.
Some ingredients are optional- such as shiftout IC with LEDs, LCD screen, and RFID reader, but a suitable case is a must thing.
The case consists of two parts- for main device, and the holder for ultrasonic sensor. There is an additional limitation to length of the cables between grip's sensors and the main PCB- to limit capacitance of the sensor, and to increase it's stability.
The main PCB is assembled on the prototype board.
In the future I hope to connect it's on the normal double sided PCB
To upload a data, I've decided to use thingspeak.com- it's supports clean HTTP, without SSL (as far as you know, it's very difficult or really impossible to run SSL on the Arduino Nano/Uno because of memory limitations, and I still have not received MKR-1000). On the other side, the Azure services are really more advanced, but SSL required.
To init the device I developed Windows 10 universal application. You have to connect the device and run this configuration utility- it's helps you to connect device to WiFi network. This software is based on the WUA samples, more specifically on the SerialArduino.
"Gekturnik configurator" uses a simple protocol to communicate with Arduino:
3 <SSID name> to update WiFi SSID (in the memory, and EEPROM)
4 <Password> to update WiFi key (in the memory, and EEPROM)
2 3 to load WiFi configuration from EEPROM
2 4 to save WiFi configuration to EEPROM
2 5 to reconnect WiFi
Full list of available commands you can find in the comments of .ino source code
And here is my short demo :-)
I hope to advance my project:
1. Add 4 more grip sensors to identify excersise type. As far as you know there are 3 main types of the pullup- wide (focused on your back muscles), narrow (focused on your biceps) and normal.
2. Develop RFID cards managementin the config utility to add, remove and rename users.
3. I've received MKR-1000 several days ago, so it's possible to use Azure as a storage for data in the future version of this project.
#include <ADCTouch.h>
#include <NewPing.h>
#include <SoftwareSerial.h>
#include <stdlib.h>
#include <SPI.h>
#include <MFRC522.h>
#include <String.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <SerialCommand.h>
#include <EEPROM.h>
#define SERIALCOMMANDDEBUG
#define WiFiSSIDLen 15
#define WiFiPASSLen 15
//Debug levels- to show some info on the screen during development. Default level=DBGINFO
#define DBGNO 0
#define DBGERROR 1
#define DBGPROTOCOL 2
#define DBGINFO 3
#define DBGALL 4
#define DBGVERBOSE 5
byte dbg=DBGINFO;
//Number of grips on the pullup bar
#define GripTotal 2
#define DATA_PIN 2 //onnected to DS pin (data) of NXP 74HC595
#define LATCH_PIN 3 //Connected to latch pin of NXP 74HC595
#define CLOCK_PIN 4 //onnected to SH_CP (clock) of NXP 74HC595
#define ECHO_PIN 5 // Arduino pin conneted to echo pin on the ultrasonic sensor.
#define TRIGGER_PIN 6 // Arduino pin connected to trigger pin on the ultrasonic sens
#define RX_WIFI_PIN 7 // Arduino pin connected to RX pin of ESP8266
#define TX_WIFI_PIN 8 // Arduino pin connected to TX pin of ESP8266
#define RFID_RST_PIN 9 // Connection to RST pin of cardreader
#define RFID_SDA_PIN 10 // Connection to SS pin of cardreader
/*Some more digital pins are used:
SPI MOSI D11
SPI MISO D12
SPI SCK D13*/
#define LEFT_NORM_GRIP A0 // Connection to left grip
#define RIGHT_NORM_GRIP A1 // Connection to right grip
/*Some more analogue pins are used (if LED screen connected)
* LCD SDA A4
* LCD SLC A5
*/
//
#define WIFIERR_OK 0
#define WIFIERR_NOTCPCONNECTION 1
#define WIFIERR_SENDERR 2
#define WIFIERR_SERVERERR 3
#define WIFIERR_UNKNOWN 4
/* Cardreader connection
* cardreader side Arduino side
-------------
SDA -| |- Pin D10
SCK -| |- Pin D13
MOSI -| |- Pin D11
MISO -| |- Pin D12
IRQ -| |-
GND -| |- GND
RST -| |- Pin D9
3.3V -| |- 3.3V
-------------
ESP 8266 connection
----------------------------
| |
| D7 GND -------- |
| 3.3V * | |
| * * -------- |
| 3.3V D8 | |
| -------- |
----------------------------
Shiftout IC connection (NXP 74HC595)
---------------
2 bit | U | 5V
3 bit | N X P | 1 bit
4 bit | | Data PIN D2
5 bit | | GND
6 bit | | Latch PIN D3
7 bit | | Clock PIN D4
8 bit | | 5V
GND | O |
---------------
*/
//Ultrasonic variables
#define MAX_PULLUP_DIST 30 //Maximal distance between user head and sonar to complete pullup
#define MIN_PULLUP_DIST 2 //Minimal distance between user head and sonar to complete pullup
#define MAX_DISTANCE 100 // Maximum distance for ultrasonic sensor
//Capacitive sensor variables
#define CapacityTouchLevel 50 //"Base" level for sensor capacity
#define CapAverageBase 100 //This variable used to average capacitor delay time
//Variable to exclude too fast pullups- it's may be some errors (it's impossible to make a pullup faster then some milliseconds). Variable in milliseconds- 0,5 sec default
#define MIN_PULLUP_TIME 500
//LED numbers
#define SPK_LED 2 //Speaker
#define WIFI_ERR_LED 3 //WiFi disconnected
#define WIFI_OK_LED 5 //WiFi connected
#define TOUCH_LED 6 //Grips touched
#define RFID_LED 7 //RFID card has been readed
#define PULLUP_LED 8 //Blink on each completed pullup
NewPing sonar(TRIGGER_PIN, ECHO_PIN, MAX_DISTANCE); // NewPing setup of pins and maximum distance.
SerialCommand serialCommand; //New object to manage commands between computer and Arduino device
LiquidCrystal_I2C lcd(0x3F, 16, 2); // New object for lcd screend
//Screen map
char LCDMap[16][2]={0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0};
//New class to manage LEDs, connected to shiftout IC NXP 74HC595
class InformLED {
public: InformLED(byte l_pin, byte c_pin, byte d_pin) {
L_PIN = l_pin;
C_PIN = c_pin;
D_PIN = d_pin;
pinMode(L_PIN, OUTPUT);
pinMode(C_PIN, OUTPUT);
pinMode(D_PIN, OUTPUT);
}
public: void BlinkLed(byte LED, int mseconds) {
BlinkDelay [LED - 1] = mseconds;
BlinkStartTime [LED - 1] = millis();
LedOn(LED);
}
public: void RunLED() {
int t = millis();
for (int i = 0; i <= 7; i++) {
if ((BlinkStartTime [i] + BlinkDelay [i] <= t) && Status(i + 1) && (BlinkDelay[i] != -1)) {
LedOff(i + 1);
BlinkStartTime[i] = 0;
BlinkDelay[i] = -1;
}
}
}
public: boolean Status() {
return LEDStatus;
}
public: boolean Status(byte LED) {
byte i = 1;
i = i << (LED - 1);
if (LEDStatus & i) {
return true;
} else {
return false;
}
}
public: void LedOn(byte LED) {
byte i = 1;
i = i << (LED - 1);
LEDStatus = LEDStatus | i;
digitalWrite(L_PIN, LOW); //Turn latch off
shiftOut(D_PIN, C_PIN, MSBFIRST, LEDStatus); //Send data to IC
digitalWrite(L_PIN, HIGH); //Turn latch on
}
public: void LedOff(byte LED) {
byte i = 1;
i = i << (LED - 1);
i = i ^ 255;
LEDStatus = LEDStatus & i;
digitalWrite(L_PIN, LOW); //Turn latch off
shiftOut(D_PIN, C_PIN, MSBFIRST, LEDStatus); //Send data to IC
digitalWrite(L_PIN, HIGH); //Turn latch on
}
public: void AllLedOff() {
LEDStatus = 0;
for (int i = 0; i <= 7; i++) {
BlinkDelay[i] = -1;
}
digitalWrite(L_PIN, LOW);
shiftOut(D_PIN, C_PIN, MSBFIRST, LEDStatus); //Turn off all LEDs
digitalWrite(L_PIN, HIGH);
}
private: byte LEDStatus = 0;
private: int BlinkDelay [8] = { -1, -1, -1, -1, -1, -1, -1, -1};
private: int BlinkStartTime [8] = {0, 0, 0, 0, 0, 0, 0, 0};
private: byte L_PIN = 0, C_PIN = 0, D_PIN = 0;
};
// New object to manage LEDs
InformLED led(LATCH_PIN, CLOCK_PIN, DATA_PIN);
long PullupTimeSet[10]; //Time moments when pullups completed
int PullupCounter = 0; //Number of completed pullups
long PullupSetStart = 0;
byte GripStatus[GripTotal], GripPrevStatus[GripTotal]; //Arrays to store grip status
long GripCapacity[GripTotal], GripOffset[GripTotal]; //Grips capacitance arrays
byte GripTouched = 0, GripPrevTouched = 0; //Number of touched grips
long StartTime = 0, FinishTime = 0, PrevPullupTime = 0; //Start, finish and previous pullup time
boolean HeadOnTopStatus = false, HeadOnTopPrevStatus = false; //Execution status (your head is over the ultrasonic sensor)
//key to send data to thingspeak.com
String apiKey = "ABCDEFGHIJKLMNOP";//Insert your own key here
//Variables for WiFi adapter
#define BUFFER_SIZE 80
char buffer[BUFFER_SIZE];
boolean WiFiState;
String NetworkSSID = "";
String NetworkPASS = "";
//Start a serial connection between Arduino and WiFi-adapter
SoftwareSerial ser(RX_WIFI_PIN, TX_WIFI_PIN); // RX, TX
//Create an object for cardreader
MFRC522 mfrc522(RFID_SDA_PIN, RFID_RST_PIN); // Create MFRC522 instance.
void setup()
{
Serial.begin(9600);
lcd.init(); // lcd initialization
lcd.backlight(); // Turn on backlight on LCD screen
lcd.clear();
lcd.cursor();
DebugPrintln(F("Start. LED self-test"), DBGALL);
LCDPrintln(&lcd,F("Start"));
if (dbg>=DBGALL) //Blink LEDs if high debug level
{
for (int i = 3; i <= 8; i++) {led.BlinkLed(i, 2000);}
for (int i = 0; i <= 500; i++) {
led.RunLED();
delay(100);
}
}
//Init serialcommands
serialCommand.addCommand("1", CompDebugLevel ); //Debug levels configuration
serialCommand.addCommand("2", CompWiFi); //WiFi management
serialCommand.addCommand("3", CompWiFiChangeSSID);//Change WiFi SSID in the memory
serialCommand.addCommand("4", CompWiFiChangePass);//Change WiFi password (key) in the memory
serialCommand.addCommand("5", CompRfid); //RFID tokens management- to be developed
serialCommand.addDefaultHandler(UnrecognizedCommand);
//Load WiFi configuration from ROM
char ssidchar[WiFiSSIDLen];
char passchar[WiFiSSIDLen];
EEPROM.get(0, ssidchar);
EEPROM.get(WiFiSSIDLen,passchar);
NetworkSSID=ssidchar;
NetworkPASS=passchar;
//Start connection between Arduino and WiFi-adapter
ser.begin(9600);
//Connecting to WiFi network
DebugPrint(F("Connect WiFi status: "), DBGINFO);
WiFiState = connectWiFi(&ser, NetworkSSID, NetworkPASS);
if (WiFiState) {
DebugPrintln(F("WiFi connected"), DBGINFO);
LCDPrintln(&lcd,F("WiFi connected"));
led.LedOn(WIFI_OK_LED);
} else
{
DebugPrintln(F("WiFi connect error"),DBGINFO);
LCDPrintln(&lcd,F("WiFi connect error"));
led.LedOn(WIFI_ERR_LED);
}
//Config base level of capacitance for each grip
GripOffset[0] = ADCTouch.read(LEFT_NORM_GRIP, 500);
GripOffset[1] = ADCTouch.read(RIGHT_NORM_GRIP, 500);
//Init cardreader
SPI.begin(); // Init SPI bus
mfrc522.PCD_Init(); // Init MFRC522 card
}
void loop()
{
long RunTime = millis();
boolean HeadOnTopStatus = GetCompletedPullup();
String ATResult;
String cmd;
int TCPSendResult;
//Check if some of the grips touched
if (ReadGripStatus())
{
if (GripTouched > 0 && GripPrevTouched == 0) {
StartTime = RunTime;
PrevPullupTime = RunTime;
led.LedOn(TOUCH_LED);
led.BlinkLed(SPK_LED, 200);
DebugPrintln(F("======= Pull-up set started ======="),DBGINFO);
LCDPrintln(&lcd,F("Pullups started"));
}
DebugPrint(String(RunTime),DBGINFO);
DebugPrint(F("\t"),DBGINFO);
PrintGripStatus();
DebugPrintln("",DBGINFO);
//Check if all grips untouched- the pullup set completed
if (GripTouched == 0 && GripPrevTouched > 0) {
FinishTime = RunTime;
led.LedOff(TOUCH_LED);
DebugPrint(F("======= Pull-up set FINISHED , excercise time="),DBGINFO);
DebugPrint(String((FinishTime - StartTime) / 1000), DBGINFO);
DebugPrint(F(" seconds, "), DBGINFO);
DebugPrint(String(PullupCounter), DBGINFO);
DebugPrintln(F(" Pullups completed. ======="), DBGINFO);
LCDPrintln(&lcd,"Pshups "+String(PullupCounter)+","+String((FinishTime - StartTime) / 1000)+"sec");
if (WiFiState ) { //Publish data to thingspeak.com if WiFi connected
if (PullupCounter > 0) { //It's make sense to publish more then zero pullups
DebugPrintln(F("Staring WiFi transfer"), DBGINFO);
clearSerialBuffer(&ser);
ATResult = StartTCPConnection(&ser, F("144.212.80.10"), 80, 1000); //Establish TCP connection
DebugPrint(F("\tStartTCPConnection result: "), DBGALL);
DebugPrintln(ATResult, DBGALL);
// Create a GET command to publish data to http://thingspeak.com
String getStr = F("GET /update?api_key=");
getStr += apiKey;
getStr += F("&field1=");
getStr += String(PullupCounter);//PullupsFieled;
getStr += F("&field2=");
getStr += String((FinishTime - StartTime) / 1000);
getStr += F("\r\n");
DebugPrintln(getStr, DBGALL);
TCPSendResult = SendTCPData(&ser, getStr);
DebugPrint(F("\tResult to server upload status:"), DBGALL);
DebugPrint(String(TCPSendResult), DBGALL);
DebugPrint(F("\t"), DBGALL);
//Case to check different send results
switch (TCPSendResult) {
case WIFIERR_OK:
DebugPrintln(F("success"), DBGALL);
LCDPrintln(&lcd,F("Result upload ok"));
break;
case WIFIERR_NOTCPCONNECTION:
DebugPrintln(F("Can not establish tcp connection"), DBGERROR);
LCDPrintln(&lcd,F("No TCP connect"));
break;
case WIFIERR_SENDERR:
DebugPrintln(F("Error on thingspeak.com protocol level"), DBGERROR);
LCDPrintln(&lcd,F("Thingspeak error"));
break;
case WIFIERR_SERVERERR:
DebugPrintln(F("Upload data not accepted, may be too fast for next update"), DBGERROR);
LCDPrintln(&lcd,F("Too fast upload"));
break;
default:
DebugPrintln(F("Upload unknown error"), DBGERROR);
LCDPrintln(&lcd,F("Unknown error"));
}
led.BlinkLed(SPK_LED, 200); //beep for 0.2 seconds
led.BlinkLed(WIFI_ERR_LED, 500); //blink for 0.5 seconds
}
} else
{
DebugPrintln(F("Could not send results: WiFi not connected"), DBGERROR);
LCDPrintln(&lcd,F("No WiFi error"));
}
PullupCounter = 0;
}
}
if ((HeadOnTopStatus != HeadOnTopPrevStatus) && (GripTouched > 0))
{
if (HeadOnTopStatus)
{
if (RunTime - PrevPullupTime > MIN_PULLUP_TIME) {
PullupTimeSet[PullupCounter] = RunTime - PrevPullupTime; //Store one more pullup
PrevPullupTime = RunTime;
PullupCounter++;
led.BlinkLed(SPK_LED, 200);
led.BlinkLed(PULLUP_LED, 500);
DebugPrint(String(PullupCounter), DBGINFO);
DebugPrint(F(" done in "), DBGINFO);
DebugPrint(String(PullupTimeSet[PullupCounter - 1]), DBGINFO);
DebugPrintln(F(" mseconds."), DBGINFO);
} else
{
DebugPrint(String(RunTime - PrevPullupTime), DBGINFO);
DebugPrint(F(" mseconds is too fast for pullup!!!! Minimal time is "), DBGINFO);
DebugPrintln(String(MIN_PULLUP_TIME), DBGINFO);
}
}
}
HeadOnTopPrevStatus = HeadOnTopStatus;
led.RunLED(); //We have to run this function to update LEDs- may be we have to turn off some LEDs or buzzer
ReadRFIDCard(); //We have to read RFID cards
serialCommand.readSerial(); //We have to check is there some new commands from the desktop computer
}
/*This function reads current capacity of grips, and updates GripStatus and GripPrevStatus arrays
It returns: TRUE if some grip states are changed and FALSE, if unchanged*/
boolean ReadGripStatus()
{
int ChangeCounter = 0;
GripPrevTouched = GripTouched;
GripTouched = 0;
//Store previous grips state
GripCapacity[0] = ADCTouch.read(LEFT_NORM_GRIP, CapAverageBase) - GripOffset[0];
GripCapacity[1] = ADCTouch.read(RIGHT_NORM_GRIP, CapAverageBase) - GripOffset[1];
for (int i = 0; i < GripTotal; i++) {
GripPrevStatus[i] = GripStatus[i];
if (GripCapacity[i] > CapacityTouchLevel) {
GripStatus[i] = 1;
}
else
{
GripStatus[i] = 0;
}
GripTouched += GripStatus[i];
if (GripStatus[i] != GripPrevStatus[i]) ChangeCounter++;
}
if (ChangeCounter > 0)
{
return true;
} else
{
return false;
}
}
//Printing grips status- for debuging purpose only
void PrintGripStatus()
{
for (int i = 0; i < GripTotal; i++)
{
DebugPrint(String(GripStatus[i]), DBGINFO);
DebugPrint("\t", DBGINFO);
}
for (int i = 0; i < GripTotal; i++)
{
DebugPrint(String(GripCapacity[i]), DBGINFO);
DebugPrint("\t", DBGINFO);
}
}
//Check if a pullup completed
boolean GetCompletedPullup()
{
unsigned int distance = sonar.ping(); // Send ping, get ping time in microseconds (uS).
distance /= US_ROUNDTRIP_CM; // Convert ping time to distance in cm
if (distance > MAX_PULLUP_DIST || distance < MIN_PULLUP_DIST)
{
return false;
} else
{
return true;
}
}
//Here is a Wi-Fi subroutines
//Send AT command to WiFi adapter
String PassATCommand(SoftwareSerial *ESPport, String AT_Command, int wait)
{
String tmpData;
unsigned long t1 = 0, t = 0, t2 = 0;
DebugPrint(F("PassATCommand started. Command="), DBGALL);
DebugPrint(AT_Command, DBGALL);
DebugPrint(F(" delay="), DBGALL);
DebugPrintln(String(wait), DBGALL);
DebugPrint(F("Memory available="), DBGVERBOSE);
DebugPrintln(String(freeRam()), DBGVERBOSE);
ESPport->println(AT_Command);
t1 = millis();
t = t1;
t2 = t1 + wait;
DebugPrintln(String("t1="+String(t1)+" t="+String(t)+" t2="+String(t2)), DBGVERBOSE);
while (t < t2)
{
while (ESPport->available() > 0 )
{
char c = ESPport->read();
tmpData += c;
if ( tmpData.indexOf(AT_Command) > -1 )
tmpData = ""; //If we get back a text of AT command- clean string
else
{
tmpData.trim();//delete blank characters and CR
}
}
t = millis();
}
DebugPrint(F("PassATCommand finished. ATResult="), DBGALL);
DebugPrintln(tmpData, DBGALL);
return tmpData;
}
///Clean ESPport
void clearSerialBuffer(SoftwareSerial *ESPport)
{
while ( ESPport->available() > 0 )
{
ESPport->read();
}
}
//Show available WiFi networks
String ListWiFiNetworks() {
String ConnectResult;
ConnectResult=PassATCommand(&ser,"AT+CWLAP",2000);
DebugPrintln(F("ListWiFiNetwork="), DBGERROR);
DebugPrintln(ConnectResult, DBGERROR);
return ConnectResult;
}
//Reset WiFi adapter
String ResetWiFi(SoftwareSerial *ESPport) {
String ConnectResult;
ConnectResult=PassATCommand(ESPport,"AT+RST",3000);
DebugPrintln(F("ResetWiFi="), DBGERROR);
DebugPrintln(ConnectResult, DBGERROR);
return ConnectResult;
}
//Check WiFi connection status
String WiFiStatus(SoftwareSerial *ESPport) {
String ConnectResult;
ConnectResult = PassATCommand(ESPport, "AT+CWJAP?", 3000);
DebugPrintln(F("WiFiStatus="), DBGERROR);
DebugPrintln(ConnectResult, DBGERROR);
return ConnectResult;
}
//Connect to WiFi network
boolean connectWiFi(SoftwareSerial *ESPport, String NetworkSSID, String NetworkPASS)
{
//Reset WiFi-adapter
//PassATCommand(ESPport,"AT+RST",3000);
//ConnectResult=PassATCommand(ESPport,"AT+CWLAP",300);
String ConnectResult;
ConnectResult = PassATCommand(ESPport, "AT+CWJAP?", 3000);
if (strstr(ConnectResult.c_str(), NetworkSSID.c_str()) != NULL) {
DebugPrintln(F("Wifi already connected"), DBGALL);
return true;
}
//Set device mode. 1- client, 2- access point, 3- client+access point
ConnectResult = PassATCommand(ESPport, "AT+CWMODE=1", 300);
String cmd = "AT+CWJAP=\"";
cmd += NetworkSSID;
cmd += "\",\"";
cmd += NetworkPASS;
cmd += "\"";
//Connect to WiFi network
PassATCommand(ESPport, cmd, 6500);
//We have to get WiFi network name+OK. It's connected if substring found
if (ConnectResult.indexOf(F("WIFICONNECTEDWIFIGOTIPOK")) > -1) {
return true;
} else
{
return false;
}
}
//Start TCP connection
String StartTCPConnection(SoftwareSerial *ESPport, String IP, int Port, int wait)
{
String ATResult;
DebugPrint(F("Function StartTCPConnection started. IP="), DBGALL);
DebugPrintln(IP, DBGALL);
// Create AT command for WiFi adapter
String cmd = "AT+CIPSTART=\"TCP\",\"";
cmd += IP;
cmd += "\",";
cmd += (String) Port;
clearSerialBuffer(ESPport);
//Establish TCP connection
ATResult = PassATCommand(&ser, cmd, 1000);
DebugPrint("ATResult=", DBGALL);
DebugPrintln(ATResult, DBGALL);
return ATResult;
}
int SendTCPData(SoftwareSerial *ESPport, String data) {
String cmd = "";
String ATResult;
DebugPrint("Memory available=", DBGVERBOSE);
DebugPrintln(String(freeRam()), DBGVERBOSE);
cmd += "AT+CIPSEND=";
cmd += String(data.length());
ATResult = PassATCommand(ESPport, cmd, 1000);
DebugPrint(F("Ready to transfer data:"), DBGVERBOSE);
DebugPrintln(data, DBGVERBOSE);
ATResult = PassATCommand(ESPport, data, 1000);
DebugPrint(F("Data transfered\nATResult="), DBGALL);
DebugPrintln(ATResult, DBGALL);
if (ATResult.indexOf("SENDOK+IPD") > 0) {
DebugPrintln(F("Data sent"), DBGALL);
int i = ATResult.indexOf(":");
int j = ATResult.indexOf("CLOSED");
String ThingSpeakResultNumber;
ThingSpeakResultNumber = ATResult.substring(i + 1, j);
int k = ThingSpeakResultNumber.toInt();
if (k) {
return WIFIERR_OK;
} else
{
return WIFIERR_SERVERERR;
}
}
return WIFIERR_UNKNOWN;
}
//Read RFID cards
void ReadRFIDCard() {
//Check if there are new card available
if ( ! mfrc522.PICC_IsNewCardPresent()) {
return;
}
DebugPrintln(F("RFID started"), DBGINFO);
// Check if reading acceptable
if ( ! mfrc522.PICC_ReadCardSerial()) return;
DebugPrint(F("Card UID in HEX format:"), DBGINFO); //Dump UID
for (byte i = 0; i < mfrc522.uid.size; i++) {
DebugPrint(String(mfrc522.uid.uidByte[i] < 0x10 ? " 0" : " "), DBGINFO);
DebugPrint(String(mfrc522.uid.uidByte[i], HEX), DBGINFO);
}
DebugPrintln("", DBGINFO);
DebugPrint(F("Card UID:"), DBGINFO); //Dump UID
for (byte i = 0; i < mfrc522.uid.size; i++) {
DebugPrint(String((char)mfrc522.uid.uidByte[i]), DBGINFO);
}
byte piccType = mfrc522.PICC_GetType(mfrc522.uid.sak);
DebugPrint(F("PICC type:"), DBGINFO);
DebugPrintln(String(mfrc522.PICC_GetTypeName(piccType)), DBGINFO);
if ( piccType != MFRC522::PICC_TYPE_MIFARE_MINI
&& piccType != MFRC522::PICC_TYPE_MIFARE_1K
&& piccType != MFRC522::PICC_TYPE_MIFARE_4K) {
DebugPrintln(F("This program only works with MIFARE Classic cards."), DBGERROR);
return;
}
DebugPrintln("", DBGINFO);
LCDPrintln(&lcd,F("Card read"));
//Turn off CPU inside if RFID card to exclude double reading
mfrc522.PICC_HaltA(); // Halt PICC
led.BlinkLed(SPK_LED, 200); //beep for 0.2 seconds
led.LedOn(RFID_LED); //blink to show that RFID card accepted
}
//Print some string starting at (X,Y) positions
void LCDPrintXY(LiquidCrystal_I2C * lcd, String text, byte x, byte y)
{
char maxstr=0;
DebugPrintln(String("x="+String(x)+", y="+String(y)), DBGALL);
if (text.length()<16) maxstr=text.length(); else maxstr=16;
for (int i=0;i<maxstr;i++)
{
DebugPrintln(String("i="+String(i)+", c="+text[i]), DBGALL);
lcd->setCursor(x+i, y);
lcd->print(text[i]); // Print text
LCDMap[x+i][y]=text[i];
}
DebugPrintln("", DBGALL);
}
//Print a string and scroll up
void LCDPrintln(LiquidCrystal_I2C * lcd, String text)
{
char c=0, maxstr=0;
for (int i=0;i<16;i++)
{
DebugPrint(String(text[i]), DBGALL);
if (i>=text.length()) c=32; else c=text[i];
lcd->setCursor(i, 0);
lcd->print(LCDMap[i][1]);
LCDMap[i][1]=c;
lcd->setCursor(i, 1);
lcd->print(c);
}
DebugPrintln("", DBGALL);
}
//Show mem available (RAM)
int freeRam ()
{
extern int __heap_start, *__brkval;
int v;
return (int) &v - (__brkval == 0 ? (int) &__heap_start : (int) __brkval);
}
//Similar to Serial.print, but with debug level checking
void DebugPrint(String SerialText, byte DBGLevel)
{
if (dbg>=DBGLevel)
{
Serial.print(SerialText);
}
}
//Similar to Serial.println, but with debug level checking
void DebugPrintln(String SerialText, byte DBGLevel)
{
if (dbg>=DBGLevel)
{
Serial.println(SerialText);
}
}
//////////////////////////////////////////////////////////////////
//Subroutines to chat with computer via serial
//Change debug levels
void CompDebugLevel() {
char *arg = serialCommand.next();
boolean CorrectArgument=false;
if (arg != NULL){
if ( strcmp(arg, "0" ) == 0){
dbg=DBGNO;
CorrectArgument=true;
DebugPrintln(F("Debug level=DBGNO"), DBGINFO);
}
if ( strcmp(arg, "1" ) == 0){
dbg=DBGERROR;
CorrectArgument=true;
DebugPrintln(F("Debug level=DBGERROR"), DBGINFO);
}
if ( strcmp(arg, "2" ) == 0){
dbg=DBGPROTOCOL;
CorrectArgument=true;
DebugPrintln(F("Debug level=DBGPROTOCOL"), DBGINFO);
}
if ( strcmp(arg, "3" ) == 0){
dbg=DBGINFO;
CorrectArgument=true;
DebugPrintln(F("Debug level=DBGINFO"), DBGINFO);
}
if ( strcmp(arg, "4" ) == 0){
dbg=DBGALL;
CorrectArgument=true;
DebugPrintln(F("Debug level=DBGALL"), DBGINFO);
}
if ( strcmp(arg, "5" ) == 0){
dbg=DBGVERBOSE;
CorrectArgument=true;
DebugPrintln(F("Debug level=DBGVERBOSE"), DBGINFO);
}
if(!CorrectArgument) {
DebugPrintln(F("Incorrect parameters"), DBGERROR);
}
} else
{
DebugPrint(F("Debug level="), DBGINFO);
DebugPrintln(String(dbg), DBGPROTOCOL);
}
}
//Manage WiFi settings
void CompWiFi() {
char *arg = serialCommand.next();
boolean CorrectArgument=false;
String ATResult;
if (arg != NULL)
{
//Get WiFi status
if ( strcmp(arg, "1" ) == 0){
CorrectArgument=true;
if (WiFiState) DebugPrintln("1", DBGPROTOCOL); else DebugPrintln("0", DBGPROTOCOL);
}
//Get WiFi current configuration
if ( strcmp(arg, "2" ) == 0){
CorrectArgument=true;
DebugPrintln(NetworkSSID, DBGPROTOCOL);
DebugPrintln(NetworkPASS, DBGPROTOCOL);
}
//Save to EEPROM current WiFi configuration
if ( strcmp(arg, "3" ) == 0){
CorrectArgument=true;
char ssidchar[WiFiSSIDLen];
char passchar[WiFiPASSLen];
NetworkSSID.toCharArray(ssidchar, WiFiSSIDLen);
NetworkPASS.toCharArray(passchar, WiFiPASSLen);
DebugPrintln(F("save to flash"), DBGALL);
DebugPrintln(ssidchar,DBGALL);
DebugPrintln(passchar,DBGALL);
EEPROM.put(0, ssidchar);
EEPROM.put(WiFiSSIDLen,passchar);
}
//Load from EEPROM WiFi configuration
if ( strcmp(arg, "4" ) == 0){
CorrectArgument=true;
char ssidchar[WiFiSSIDLen];
char passchar[WiFiPASSLen];
EEPROM.get(0, ssidchar);
EEPROM.get(WiFiSSIDLen,passchar);
NetworkSSID=ssidchar;
NetworkPASS=passchar;
DebugPrintln(F("load from flash"), DBGALL);
DebugPrintln(NetworkSSID, DBGPROTOCOL);
DebugPrintln(NetworkPASS, DBGPROTOCOL);
}
//Reconnect to WiFi
if ( strcmp(arg, "5" ) == 0){
CorrectArgument=true;
DebugPrint(F("Connect WiFi status: "), DBGINFO);
WiFiState = connectWiFi(&ser, NetworkSSID, NetworkPASS);
if (WiFiState) {
DebugPrintln(F("WiFi connected"), DBGINFO);
LCDPrintln(&lcd,F("WiFi connected"));
led.LedOn(WIFI_OK_LED);
} else
{
DebugPrintln(F("WiFi connect error"),DBGINFO);
LCDPrintln(&lcd,F("WiFi connect error"));
led.LedOn(WIFI_ERR_LED);
}
}
}
if(!CorrectArgument) {
DebugPrintln(F("Incorrect parameters"), DBGERROR);
}
}
//Change SSID for WiFi network
void CompWiFiChangeSSID() {
char *arg = serialCommand.next();
if (arg != NULL)
{
NetworkSSID=arg;
DebugPrint(F("NetworkSSID="), DBGALL);
DebugPrintln(NetworkSSID, DBGALL);
} else {
DebugPrint(F("Incorrect parameters"), DBGALL);
}
}
//Change password for WiFi network
void CompWiFiChangePass() {
char *arg = serialCommand.next();
if (arg != NULL)
{
NetworkPASS=arg;
DebugPrint(F("NetworkPASS="), DBGALL);
DebugPrintln(NetworkPASS, DBGALL);
} else {
DebugPrint(F("Incorrect parameters"), DBGALL);
}
}
//Manage RFID cards- to be developed
void CompRfid() {
}
//Some other trash from the computer
void UnrecognizedCommand(){
DebugPrintln(F("Unrecognized command"), DBGERROR);
DebugPrintln(F("Usage: <debug|wifi|changessid|changepass|flash|rfid>"), DBGERROR);
}
Ultrasonic sensor holder
ScratchNo preview (download only).








{kind=link}
Comments