// library for I2C devices
#include "Wire.h"
// variables for ultrasonic sensors
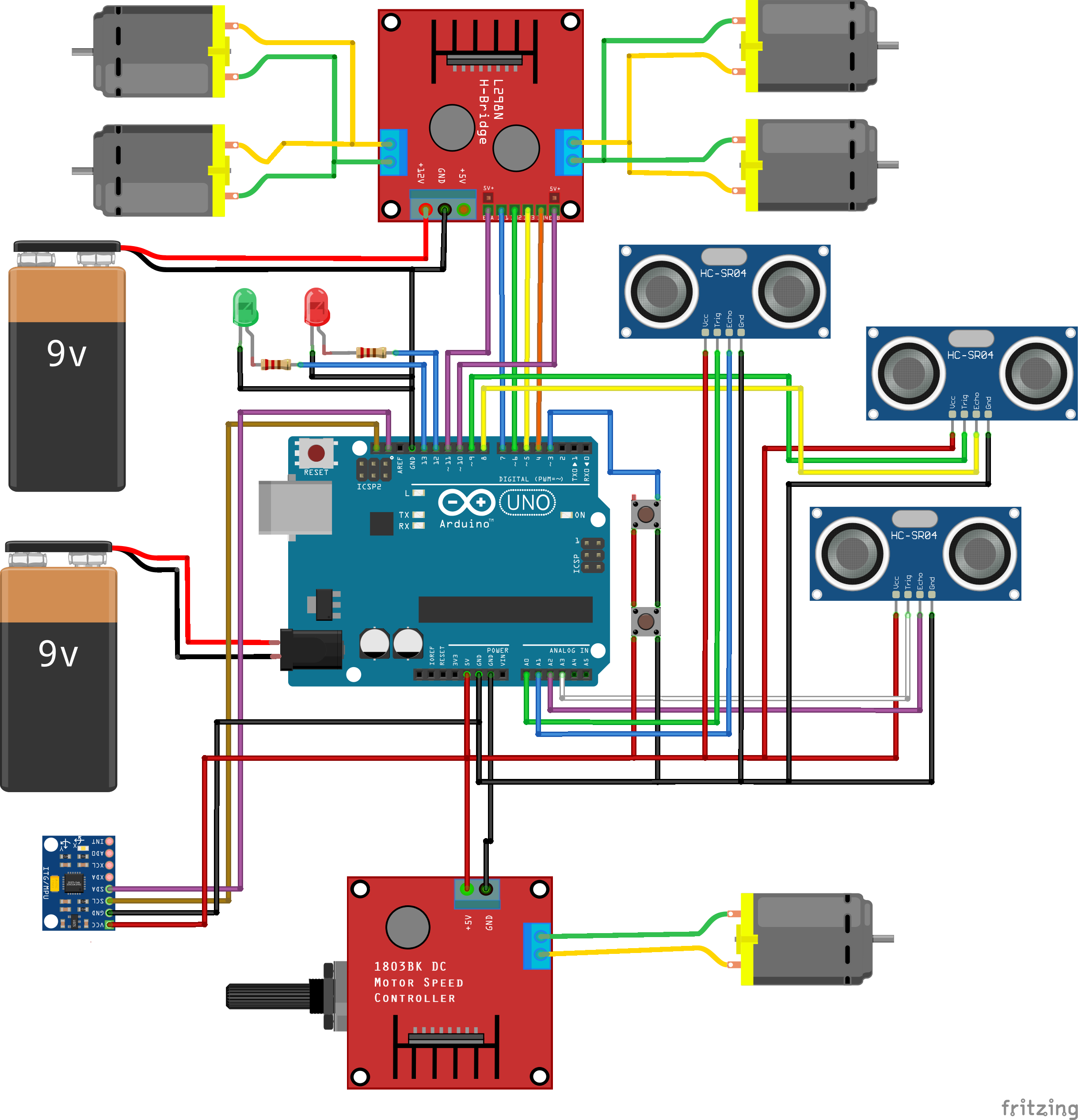
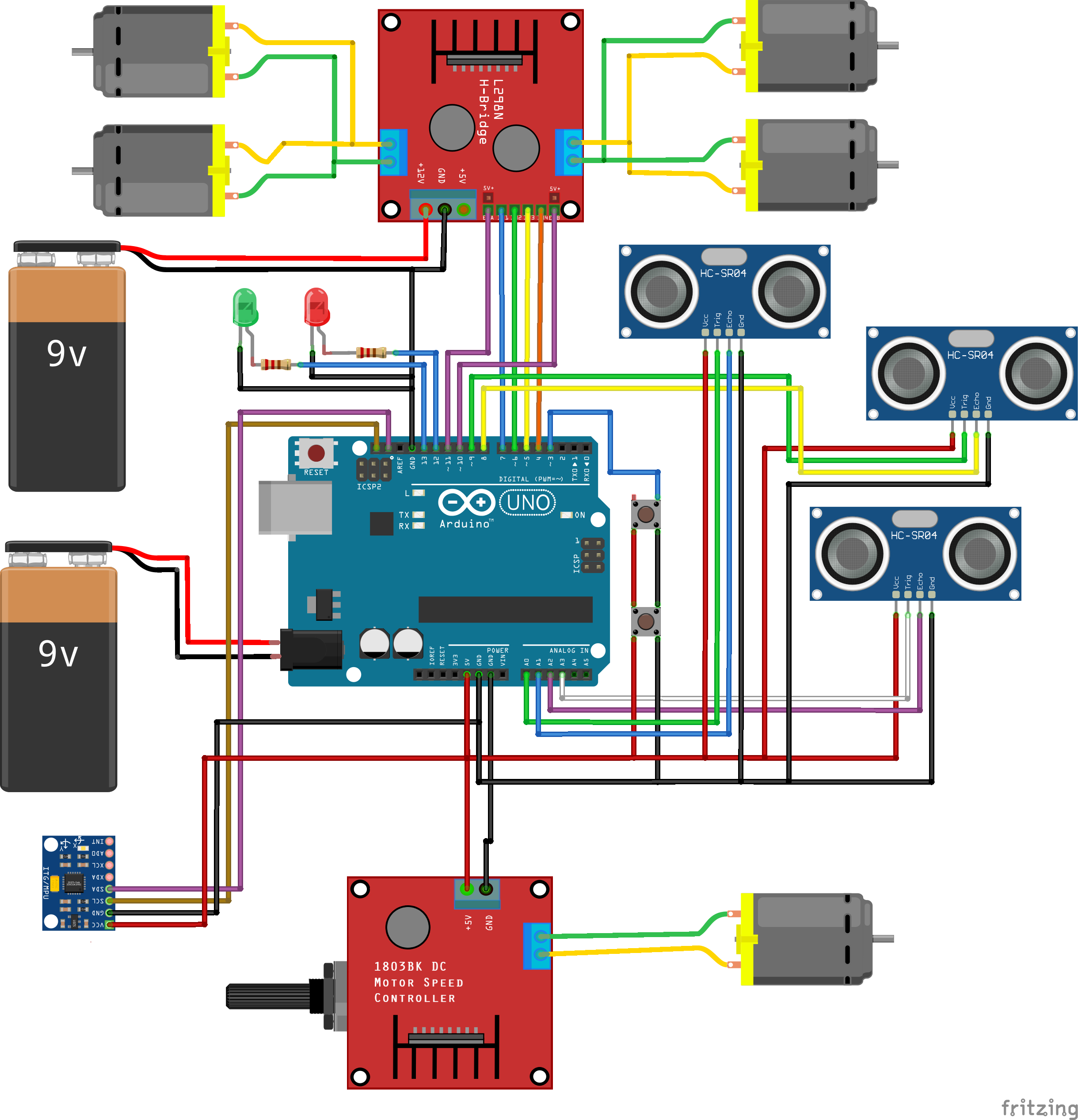
int trigPinMid = 9;
int echoPinMid = 8;
int trigPinRight = A0;
int echoPinRight = A1;
int trigPinLeft = A2;
int echoPinLeft = A3;
// measured distance by three ultrasonic sensors
long durationMid = 0;
long distanceMid = 0;
long durationRight = 0;
long distanceRight = 0;
long durationLeft = 0;
long distanceLeft = 0;
// vars for buttons
const int buttonPin = 3;
int button = 0; // is pressed?
// vars for motors
int backwardRightMotor = 4;
int forwardRightMotor = 5;
int backwardLeftMotor = 6;
int forwardLeftMotor = 7;
int speedLeftMotor = 10;
int speedRightMotor = 11;
// vars for gyro
const int MPU_ADDR = 0x68; // I2C address MPU-6050
int16_t accelerometer_x, accelerometer_y, accelerometer_z;
int16_t temperature; // temperature
char tmp_str[7]; // help variable for conversion
// vars for leds
int ledZ = 12;
int ledC = 13;
// convert int16 to string
char* convert_int16_to_str(int16_t i) {
sprintf(tmp_str, "%6d", i);
return tmp_str;
}
// void setup is called after microcontroller start up
void setup() {
Serial.begin (9600);
// gyro config
Wire.begin();
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6B);
Wire.write(0);
Wire.endTransmission(true);
// ultrasonic sensors pins config
pinMode(trigPinMid, OUTPUT);
pinMode(echoPinMid, INPUT);
pinMode(trigPinRight, OUTPUT);
pinMode(echoPinRight, INPUT);
pinMode(trigPinLeft, OUTPUT);
pinMode(echoPinLeft, INPUT);
// led config
pinMode(ledZ, OUTPUT);
pinMode(ledC, OUTPUT);
// button pin config
pinMode(buttonPin, INPUT);
// motor pins config
pinMode(backwardRightMotor, OUTPUT);
pinMode(forwardRightMotor, OUTPUT);
pinMode(backwardLeftMotor, OUTPUT);
pinMode(forwardLeftMotor, OUTPUT);
pinMode(speedLeftMotor, OUTPUT);
pinMode(speedRightMotor, OUTPUT);
}
void loop() {
// gets slope data, stored in global vars, if the device is tilted, motors stop
getSlope();
// gets distance from all three ultrasonic sensors, stored in global vars
getDistance();
// get button pin value (1 if pressed, else 0)
button = digitalRead(buttonPin);
// test conditions for move functions (distance in cm, maximum slope +- 30)
if (accelerometer_x > 9000 or accelerometer_y > 9000 or accelerometer_x < -9000 or accelerometer_y < -9000 or accelerometer_z < 0) {
// device is tilted, stopping
stopMotor();
} else if ((distanceMid < 25 and distanceLeft >= 25 and distanceLeft >= 25) or button == 1) {
// there is an obstacle, seen by mid sensor, or the device bumped into it and the button was pressed
stopMotor();
goBackward();
delay(100);
turnAround();
delay(200);
} else if (distanceLeft < 25) {
// there is an obstacle on the left side
stopMotor();
delay(20);
turnRight();
delay(20);
} else if (distanceRight < 25) {
// there is an obstacle on the right side
stopMotor();
delay(20);
turnRight();
delay(20);
} else if (distanceMid >= 25 and distanceLeft >= 25 and distanceRight >= 25 and button == 0) {
// no obstacle, can go forward
goForward();
}
// do this every 50 miliseconds
delay(50);
}
void getSlope() {
// https://mschoeffler.com/2017/12/09/example-application-gy-521-module-mpu-6050-breakout-board-and-arduino-uno/
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H) [MPU-6000 and MPU-6050 Register Map and Descriptions Revision 4.2, p.40]
Wire.endTransmission(false); // the parameter indicates that the Arduino will send a restart. As a result, the connection is kept active.
Wire.requestFrom(MPU_ADDR, 7*2, true); // request a total of 7*2=14 registers
// "Wire.read()<<8 | Wire.read();" means two registers are read and stored in the same variable
accelerometer_x = Wire.read()<<8 | Wire.read(); // reading registers: 0x3B (ACCEL_XOUT_H) a 0x3C (ACCEL_XOUT_L)
accelerometer_y = Wire.read()<<8 | Wire.read(); // reading registers: 0x3D (ACCEL_YOUT_H) a 0x3E (ACCEL_YOUT_L)
accelerometer_z = Wire.read()<<8 | Wire.read(); // reading registers: 0x3F (ACCEL_ZOUT_H) a 0x40 (ACCEL_ZOUT_L)
temperature = Wire.read()<<8 | Wire.read(); // reading registers: 0x41 (TEMP_OUT_H) a 0x42 (TEMP_OUT_L)
Serial.print("aX = "); Serial.print(convert_int16_to_str(accelerometer_x));
Serial.print(" | aY = "); Serial.print(convert_int16_to_str(accelerometer_y));
Serial.print(" | aZ = "); Serial.print(convert_int16_to_str(accelerometer_z));
// the following equation was taken from the documentation [MPU-6000/MPU-6050 Register Map and Description, p.30]
Serial.print(" | tmp = "); Serial.print(temperature/340.00+36.53);
Serial.println();
}
void getDistance() {
// https://www.instructables.com/Using-a-SR04/
digitalWrite(trigPinMid, LOW);
delayMicroseconds(2);
digitalWrite(trigPinMid, HIGH);
delayMicroseconds(10);
digitalWrite(trigPinMid, LOW);
durationMid = pulseIn(echoPinMid, HIGH);
distanceMid = (durationMid/2) / 29.1;
digitalWrite(trigPinRight, LOW);
delayMicroseconds(2);
digitalWrite(trigPinRight, HIGH);
delayMicroseconds(10);
digitalWrite(trigPinRight, LOW);
durationRight = pulseIn(echoPinRight, HIGH);
distanceRight = (durationRight/2) / 29.1;
digitalWrite(trigPinLeft, LOW);
delayMicroseconds(2);
digitalWrite(trigPinLeft, HIGH);
delayMicroseconds(10);
digitalWrite(trigPinLeft, LOW);
durationLeft = pulseIn(echoPinLeft, HIGH);
distanceLeft = (durationLeft/2) / 29.1;
Serial.print("dS = "); Serial.print(distanceMid);
Serial.print(" | dP = "); Serial.print(distanceRight);
Serial.print(" | dL = "); Serial.print(distanceLeft);
Serial.println();
}
void goBackward() {
Serial.println(" goint back ");
// signals to motor controller, left back and right back
digitalWrite(backwardLeftMotor, HIGH);
digitalWrite(forwardLeftMotor, LOW);
digitalWrite(backwardRightMotor, HIGH);
digitalWrite(forwardRightMotor, LOW);
// signal with leds
digitalWrite(ledC, HIGH);
digitalWrite(ledZ, HIGH);
// do this for 1/10 second
delay(100);
}
void turnLeft() {
Serial.println(" turning slightly left ");
// send PWM signal to motors - (pin number, speed 0-255)
analogWrite(speedLeftMotor, 255);
analogWrite(speedRightMotor, 255);
// signals to motor controller, left back and right forward
digitalWrite(backwardLeftMotor, HIGH);
digitalWrite(forwardLeftMotor, LOW);
digitalWrite(backwardRightMotor, LOW);
digitalWrite(forwardRightMotor, HIGH);
// signal with leds
digitalWrite(ledC, HIGH);
digitalWrite(ledZ, HIGH);
// do this for 1/10 second
delay(100);
stopMotor();
}
void turnRight() {
Serial.println(" turning slightly right ");
// send PWM signal to motors - (pin number, speed 0-255)
analogWrite(speedLeftMotor, 255);
analogWrite(speedRightMotor, 255);
// signals to motor controller, left forward and right back
digitalWrite(backwardLeftMotor, LOW);
digitalWrite(forwardLeftMotor, HIGH);
digitalWrite(backwardRightMotor, HIGH);
digitalWrite(forwardRightMotor, LOW);
// signal with leds
digitalWrite(ledC, HIGH);
digitalWrite(ledZ, HIGH);
// do this for 1/10 second
delay(100);
stopMotor();
}
void turnAround() {
Serial.println(" turning around ");
// send PWM signal to motors - (pin number, speed 0-255)
analogWrite(speedLeftMotor, 255);
analogWrite(speedRightMotor, 255);
// signals to motor controller, left forward and right back
digitalWrite(backwardLeftMotor, LOW);
digitalWrite(forwardLeftMotor, HIGH);
digitalWrite(backwardRightMotor, HIGH);
digitalWrite(forwardRightMotor, LOW);
// signal with leds
digitalWrite(ledC, HIGH);
digitalWrite(ledZ, HIGH);
// do this for 350 - 700 miliseconds, the device is turning with added random element
delay(random(350, 700));
stopMotor();
}
void stopMotor() {
Serial.println(" stopMotor ");
// signals to motor controller, nothing
digitalWrite(forwardLeftMotor, LOW);
digitalWrite(backwardLeftMotor, LOW);
digitalWrite(forwardRightMotor, LOW);
digitalWrite(backwardRightMotor, LOW);
// signal with leds
digitalWrite(ledC, HIGH);
digitalWrite(ledZ, LOW);
}
void goForward() {
Serial.println(" going forward ");
// send PWM signal to motors - (pin number, speed 0-255)
analogWrite(speedLeftMotor, 100);
analogWrite(speedRightMotor, 100);
// signals to motor controller, left forward and right forward
digitalWrite(forwardLeftMotor, HIGH);
digitalWrite(backwardLeftMotor, LOW);
digitalWrite(forwardRightMotor, HIGH);
digitalWrite(backwardRightMotor, LOW);
// signal with leds
digitalWrite(ledC, LOW);
digitalWrite(ledZ, HIGH);
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)














{kind=link}
Comments