
Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
A friend of mine gave me a 4WD Hercules Mobile Robotic Platform as new year gift. I found it a perfect robot mobile platform to enter the robot world and have fun. With its strong power and complete function, I've been trying to develop various demos with all the grove sensors I have.
Here is one I love - Gesture Control Skeleton Bot. You may find that to control the robot with your instant gestrue is more interesting than controlling it with a controller.
AND, kids just can't stop making fun of it !!!
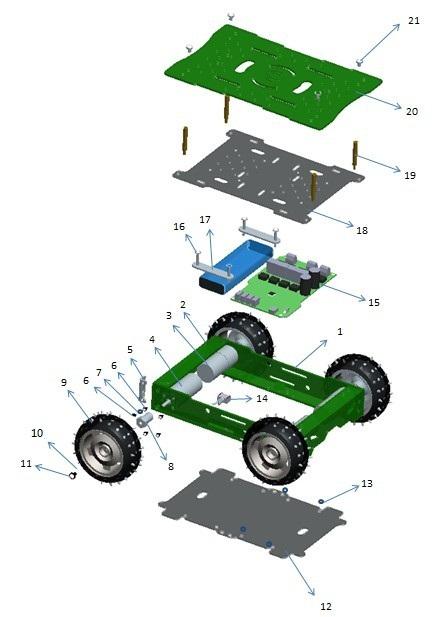
Step 1: Assembling the Robot and Grove Gestrue SensorThe assembling took me not very long to finish. It was easy to just follow the detailed instruction in Seeed Wiki (http://wiki.seeedstudio.com/Skeleton_Bot-4WD_hercules_mobile_robotic_platform/).
Note: Remember to connect the Grove - Gestrue Sensor to IIC (SCL SDA 5V GND) before you have the roof of the robot screwed on.
Step 2: Connect Robot to PC with UartSBee V4UartSBee V4 is a compact USB to serial adapter, which can be used for programming or communicating with PC. So here we connect the robot controller to computer with UartSBee V4 and a USB cable. And with integrated FT232 IC, you may need to install a driver fisrt.
You may find a demo program here to test the connection:
Hercules Dual 15A 6-20V Motor Controller - Seeed Wiki http://wiki.seeedstudio.com/Hercules_Dual_15A_6-20V_Motor_Controller/
Load the Motor Controller Library and run the "motorDriverDemo" program.
Before uploading, you need to select Tools->Board->Arduino Pro or Pro Mini (3.3V, 8MHz) w/ ATmega168 and choose the correct serial port from the Tools menu. Connect the controller to a battery or DC supply by the battery input screw terminals. Now you can see the motor rotate at a speed.
Step 4: Upload the Code and Have Fun!I guess you cannot wait showing off your great work to your families and friends already! Run and go shooting some great pictures and videos now! You are very welcomed to also share your unique work with us. Should you have any further question about this project, or want to share your work with me, feel free to drop an email to wym627@qq.com. I am Makerming from Shenzhen, China. Finally, thanks for reading, your comments are the biggest support to my work.
...................................................................................................................................................
More information of HerculesHercules is a suite of open-platform. It is convenient to install all kinds of components through the hole sites on the board. In addition, the Grove connector reserved on the board can help input several sorts of sensor data into system. What’s more, we can freely alter the device drives and programs with Arduino IDE.
Hercules consists of the component of Hercules motor controller, Hercules skeleton, gear motor etc. The Hercules motor controller can consistently support the current up to 15A and driving voltage in the range of 6V-20V, thus, it can supply strong motive power to the whole platform (could even carry a whole buckets of water).
The Hercules skeleton is made up of aluminium alloy plate with firm but pliable texture which can carry, display and connect sorts of accessories in your project. Its 4 powerful gear motors, especially a couple of them from Seeed’s original encipheror can monitor the running speed of your platform and amend the process parameter by the shaped closed-loop control. This provides a possibility to control precise process. Besides, other accessories such as wheels, cooper cylinder and acrylic guard plate that make the platform to be a completely mobile platform.











{kind=link}
Comments