import processing.serial.*;
import java.awt.event.KeyEvent;
import java.io.IOException;
Serial myPort;
String angle="";
String distance="";
String data="";
String noObject;
float pixsDistance;
int iAngle, iDistance;
int index1=0;
int index2=0;
PFont orcFont;
void setup() {
size (1900,1200);
smooth();
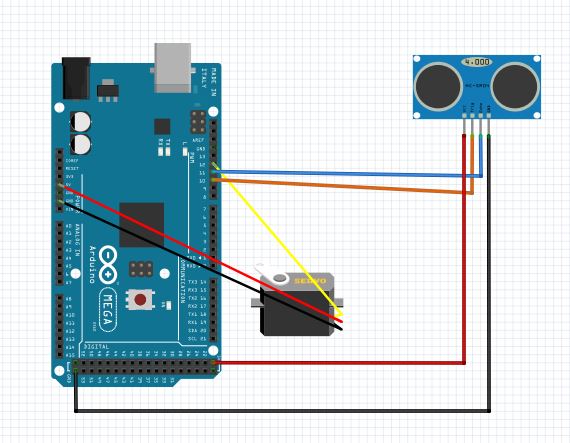
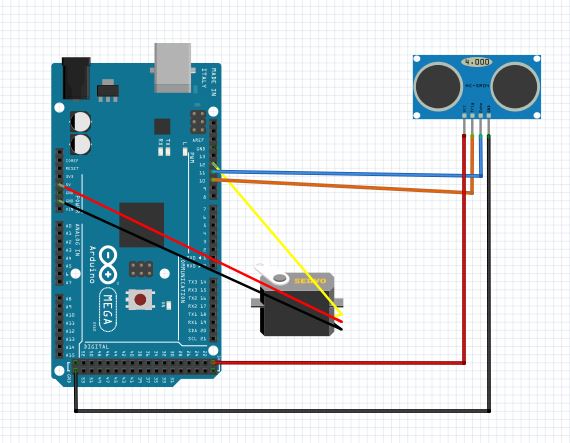
myPort = new Serial(this,"COM6", 9600);
myPort.bufferUntil('.');
}
void draw() {
fill(98,245,31);
noStroke();
fill(0,4);
rect(0, 0, width, 1010);
drawRadar();
drawLine();
drawObject();
drawText();
}
void serialEvent (Serial myPort) {
data = myPort.readStringUntil('.');
data = data.substring(0,data.length()-1);
index1 = data.indexOf(",");
angle= data.substring(0, index1);
distance= data.substring(index1+1, data.length());
iAngle = int(angle);
iDistance = int(distance);
}
void drawRadar() {
pushMatrix();
translate(700,700);
noFill();
strokeWeight(2);
stroke(255,245,255);
// draws the arc lines
arc(0,0,1800,1800,PI,TWO_PI);
arc(0,0,1400,1400,PI,TWO_PI);
arc(0,0,1000,1000,PI,TWO_PI);
arc(0,0,600,600,PI,TWO_PI);
line(-960,0,960,0);
line(0,0,-960*cos(radians(30)),-960*sin(radians(30)));
line(0,0,-960*cos(radians(60)),-960*sin(radians(60)));
line(0,0,-960*cos(radians(90)),-960*sin(radians(90)));
line(0,0,-960*cos(radians(120)),-960*sin(radians(120)));
line(0,0,-960*cos(radians(150)),-960*sin(radians(150)));
line(-960*cos(radians(30)),0,960,0);
popMatrix();
}
void drawObject() {
pushMatrix();
translate(700,700);
strokeWeight(9);
stroke(255,0,0);
pixsDistance = iDistance*22.5;
if(iDistance<40)
line(pixsDistance*cos(radians(iAngle)),-pixsDistance*sin(radians(iAngle)),950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
popMatrix();
}
void drawLine() {
pushMatrix();
strokeWeight(9);
stroke(30,10,250);
translate(700,700);
line(0,0,950*cos(radians(iAngle)),-950*sin(radians(iAngle)));
popMatrix();
}
void drawText() {
pushMatrix();
fill(0,0,0);
noStroke();
rect(0, 1010, width, 600);
textSize(25);
fill(255,255,255);
translate(800,650);
rotate(-radians(-60));
text("30°",0,0);
resetMatrix();
translate(740,600);
rotate(-radians(-30));
text("60°",0,0);
resetMatrix();
translate(680,590);
rotate(radians(0));
text("90°",0,0);
resetMatrix();
translate(620,620);
rotate(radians(-30));
text("120°",0,0);
resetMatrix();
translate(590,680);
rotate(radians(-60));
text("150°",0,0);
resetMatrix();
translate(50,650);
rotate(radians(0));
fill(5,0,0);
text("PoliArdo team Serbia",2,5);
fill(255,255,255);
text("PoliArdo team Serbia",0,0);
popMatrix();
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}
Comments