

_WSuxLGLqeO.jpg?auto=compress%2Cformat&w=40&h=40&fit=min&dpr=2)

Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 8 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
So if you check out my profile, you'll see that this is my second project posted to Arduino/Hacker.io, but I've done lots of tinkering with a sensor kit. I'm familiar with working LED matrices and after only being able to control the LEDs in groups of five on my previous wearable project, I wanted to make a wearable with individually controlled LEDs.
Step 1To begin with, I wanted to do a shirt that would look cool even with the lights off, so using stuff at home (embroidery hoop, sheer fabric from my dress, acrylic paint + fabric medium, a silhouette machine and sticker paper) I DIY screen printed a TV on my shirt.
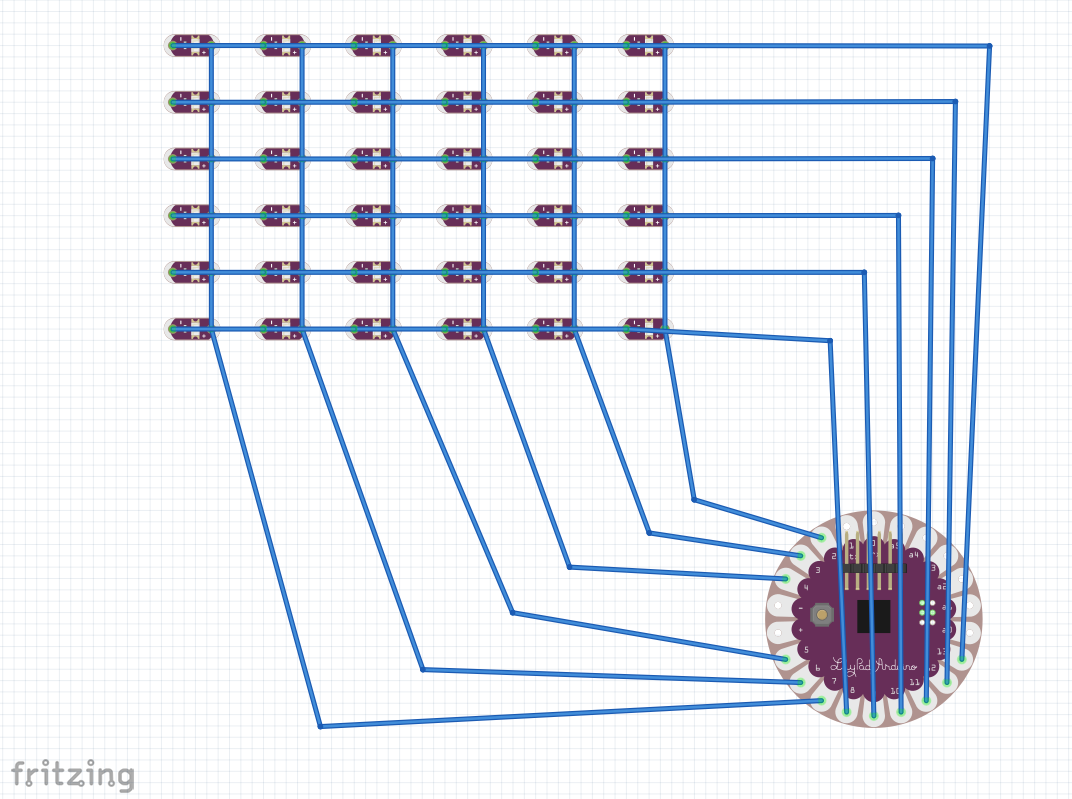
I then used the TV shape as an outline for the area to glue down all my Lilypad LEDS. I glued the Lilypad to the inside of the T-Shirt and then tied conductive threads to each of the 12 ports on the Lilypad I was using, and used fabric glue to keep the wires in place on the outside of the shirt in a way that was aesthetically pleasing.
Then I just had to tie all the lights to the "wires", using shrink wrap inside the shirt to keep rows of thread from touching columns of thread. I ran into a problem however, where one light would not turn on, this was a result of two ports having unusually high resistance. I used a multi-meter to discover the problem was at the board, so I ripped the board out and order a new one, only to discover that the board wasn't broken. I tied the board back in, and the two previously "broken" digital ports worked fine. Since tying the board back in however, one OTHER light has been dim. Lesson: Lilypads are very difficult to work with when you have many close threads.
I attempted to fix the dim light by retying the wires to the board, but the light is still very dim. Deciding not all the lights could be bright, I sewed on a panel of shimmery grey fabric over the lights, covering up the hardware and giving the TV a 'staticy' look. I uploaded code, and plugged in my power source, a 5v USB portable battery which tucks nicely into my shorts pockets. (Can't wear the shirt with jeans without pockets)
Super happy with how it turned out, even with the stubborn light that's hard to see. The lights are hard to see outside in the summer but it looks great inside, and I can't wait for school to start up to let homecoming be the inspiration for my next project. ✌️
Shirt Code
ArduinoIt's not well documented but it works.
//Maddy McGee
unsigned long prevMillis = 0;
unsigned long currentMillis = 0;
const int xAxis[6] = {2,3,4,5,6,7};//HIGH is on
const int yAxis[6] = {8,9,10,11,12,13};//LOW is on
void setup() {
pinMode(2, OUTPUT);
pinMode(3, OUTPUT);
pinMode(4, OUTPUT);
pinMode(5, OUTPUT);
pinMode(6, OUTPUT);
pinMode(7, OUTPUT);
pinMode(8, OUTPUT);
pinMode(9, OUTPUT);
pinMode(10, OUTPUT);
pinMode(11, OUTPUT);
pinMode(12, OUTPUT);
pinMode(13, OUTPUT);
}
void loop() {
allOn();
delay(2000);
allOff();
delay(500);
ex();
boxesIn(1000);
boxesOut(500);
equilizer(100,60);
//ohio(1000);
//ohioScroll(250);
//delay(100);
//IHeartArt(250);
}
void allOn()
{
digitalWrite(2, HIGH);
digitalWrite(3, HIGH);
digitalWrite(4, HIGH);
digitalWrite(5, HIGH);
digitalWrite(6, HIGH);
digitalWrite(7, HIGH);
digitalWrite(8,LOW);
digitalWrite(9,LOW);
digitalWrite(10,LOW);
digitalWrite(11,LOW);
digitalWrite(12,LOW);
digitalWrite(13,LOW);
}
void allOff()
{
digitalWrite(2, LOW);
digitalWrite(3, LOW);
digitalWrite(4, LOW);
digitalWrite(5, LOW);
digitalWrite(6, LOW);
digitalWrite(7, LOW);
digitalWrite(8,HIGH);
digitalWrite(9,HIGH);
digitalWrite(10,HIGH);
digitalWrite(11,HIGH);
digitalWrite(12,HIGH);
digitalWrite(13,HIGH);
}
void XYOn(int x, int y)//0 == far left/bottom, 6 == far right/top
{
for(int cnt = 0; cnt < 6; cnt++)
{
if(cnt == x){
digitalWrite(xAxis[cnt], HIGH);
}
else
digitalWrite(xAxis[cnt], LOW);
}
for(int cnt = 0; cnt < 6; cnt++)
{
if(cnt == y){
digitalWrite(yAxis[cnt], LOW);
}
else
digitalWrite(yAxis[cnt], HIGH);
}
}
void XOn(int x)
{
for(int cnt = 0; cnt < 6; cnt++)
{
if(cnt == x){
digitalWrite(xAxis[cnt], HIGH);
}
else
digitalWrite(xAxis[cnt], LOW);
}
}
void YOn(int y)
{
for(int cnt = 0; cnt < 6; cnt++)
{
if(cnt == y){
digitalWrite(yAxis[cnt], HIGH);
}
else
digitalWrite(yAxis[cnt], LOW);
}
}
void bihScroll()
{
allOff();
//unsigned long start = currentMillis;
boolean done = false;
int count = 0;
while(count<500)//(currentMillis - start < 100)
{
count++;
currentMillis = millis();
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(5);
delay(1);
}
while(count<1000)//(currentMillis - start < 200)
{
count++;
allOff();
currentMillis = millis();
if(count%2==0)//(currentMillis%2==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(4);
}
else
{
digitalWrite(xAxis[5], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[5], LOW);
}
delay(1);
}
while(count<1500)//(currentMillis - start < 300)
{
count++;
allOff();
if(count%3==0)//(currentMillis%3==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(3);
}
else if(count%2==0)//(currentMillis%2==0)
{
digitalWrite(xAxis[4], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[5], LOW);
}
else
{
digitalWrite(xAxis[5], HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[4], LOW);
}
delay(1);
}
while(count<2000)
{
count++;
allOff();
if(count%4==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(2);
}
else if(count%3==0)
{
digitalWrite(xAxis[3], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[5], LOW);
}
else if(count%2==0)
{
digitalWrite(xAxis[4], HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[4], LOW);
}
else
{
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
while(count<2500)
{
count++;
allOff();
if(count%4==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(1);
XOn(5);
}
else if(count%3==0)
{
digitalWrite(xAxis[2], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[5], LOW);
}
else if(count%2==0)
{
digitalWrite(xAxis[3], HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[4], LOW);
}
else
{
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
while(count<3000)
{
count++;
allOff();
if(count%4==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(0);
XOn(4);
}
else if(count%3==0)
{
digitalWrite(xAxis[1], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[5], LOW);
}
else if(count%2==0)
{
digitalWrite(xAxis[2], HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[4], LOW);
}
else
{
digitalWrite(xAxis[3],HIGH);
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
while(count<3500)
{
count++;
allOff();
if(count%4==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(3);
XOn(5);
}
else if(count%3==0)
{
digitalWrite(xAxis[0], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[5], LOW);
}
else if(count%2==0)
{
digitalWrite(xAxis[1], HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[4], LOW);
}
else
{
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
while(count<4000)
{
count++;
allOff();
if(count%4==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(2);
XOn(4);
}
else if(count%3==0)
{
XYOn(5,3);
}
else if(count%2==0)
{
digitalWrite(xAxis[0], HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[4], LOW);
}
else
{
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
while(count<4500)
{
count++;
allOff();
if(count%3==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(1);
XOn(3);
XOn(5);
}
else if(count%2==0)
{
XYOn(4,3);
}
else
{
digitalWrite(xAxis[0],HIGH);
digitalWrite(xAxis[2],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
while(count<5000)
{
count++;
allOff();
if(count%3==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(0);
XOn(2);
XOn(4);
}
else if(count%2==0)
{
XYOn(3,3);
}
else
{
digitalWrite(xAxis[1],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
while(count<5500)
{
count++;
allOff();
if(count%3==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(1);
XOn(3);
}
else if(count%2==0)
{
XYOn(2,3);
}
else
{
digitalWrite(xAxis[0],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
while(count<6000)
{
count++;
allOff();
if(count%2==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(0);
XOn(2);
}
else
{
XYOn(1,3);
}
delay(1);
}
while(count<6500)
{
count++;
allOff();
if(count%2==0)
{
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(1);
}
else
{
XYOn(0,3);
}
delay(1);
}
while(count<7000)
{
count++;
allOff();
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5], LOW);
XOn(0);
delay(1);
}
allOff();
delay(500);
}
void ex()
{
allOff();
digitalWrite(xAxis[0],HIGH);
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
delay(300);
allOff();
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[1],LOW);
digitalWrite(yAxis[4],LOW);
delay(300);
allOff();
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(yAxis[2],LOW);
digitalWrite(yAxis[3],LOW);
delay(500);
int count =0;
while(count<700)
{
allOff();
count++;
if(count%2==0)
{
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[1],LOW);
digitalWrite(yAxis[4],LOW);
}
else
{
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(yAxis[2],LOW);
digitalWrite(yAxis[3],LOW);
}
}
while(count<2000)
{
allOff();
count++;
if(count%3==0)
{
digitalWrite(xAxis[0],HIGH);
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
else if(count %2 ==0)
{
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[1],LOW);
digitalWrite(yAxis[4],LOW);
}
else
{
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(yAxis[2],LOW);
digitalWrite(yAxis[3],LOW);
}
delay(1);
}
}
void boxesIn(int rate)
{
int count = 0;
while(count<rate)
{
allOff();
count++;
if(count%2==0)
{
digitalWrite(xAxis[0],HIGH);
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[1],LOW);
digitalWrite(yAxis[2],LOW);
digitalWrite(yAxis[3],LOW);
digitalWrite(yAxis[4],LOW);
digitalWrite(yAxis[5],LOW);
}
else
{
digitalWrite(xAxis[0],HIGH);
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
while(count<(2*rate))
{
allOff();
count++;
if(count%2==0)
{
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[1],LOW);
digitalWrite(yAxis[2],LOW);
digitalWrite(yAxis[3],LOW);
digitalWrite(yAxis[4],LOW);
}
else
{
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[1],LOW);
digitalWrite(yAxis[4],LOW);
}
delay(1);
}
while(count<(3*rate))
{
allOff();
count++;
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(yAxis[2],LOW);
digitalWrite(yAxis[3],LOW);
delay(1);
}
}
void boxesOut(int rate)
{
int count = 0;
while(count<rate)
{
allOff();
count++;
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(yAxis[2],LOW);
digitalWrite(yAxis[3],LOW);
delay(1);
}
while(count<(2*rate))
{
allOff();
count++;
if(count%2==0)
{
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[1],LOW);
digitalWrite(yAxis[2],LOW);
digitalWrite(yAxis[3],LOW);
digitalWrite(yAxis[4],LOW);
}
else
{
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[1],LOW);
digitalWrite(yAxis[4],LOW);
}
delay(1);
}
while(count<(3*rate))
{
allOff();
count++;
if(count%2==0)
{
digitalWrite(xAxis[0],HIGH);
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[1],LOW);
digitalWrite(yAxis[2],LOW);
digitalWrite(yAxis[3],LOW);
digitalWrite(yAxis[4],LOW);
digitalWrite(yAxis[5],LOW);
}
else
{
digitalWrite(xAxis[0],HIGH);
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
}
void equilizer(int duration, int times)
{
int zero, one, two, three, four, five;
zero = random(1,6);
one = random(1,6);
two = random(1,6);
three = random(1,6);
four = random(1,6);
five = random(1,6);
for(int l = 0; l < times; l++)
{
int count = 0;
while(count < duration)
{
allOff();
count++;
if(count%6 == 0)
{
digitalWrite(xAxis[0],HIGH);
for(int h = 0; h < zero; h++)
{
digitalWrite(yAxis[h], LOW);
}
}
else if(count%5 == 0)
{
digitalWrite(xAxis[1],HIGH);
for(int h = 0; h < one; h++)
{
digitalWrite(yAxis[h], LOW);
}
}
else if(count%4 == 0)
{
digitalWrite(xAxis[2],HIGH);
for(int h = 0; h < two; h++)
{
digitalWrite(yAxis[h], LOW);
}
}
else if(count%3 == 0)
{
digitalWrite(xAxis[3],HIGH);
for(int h = 0; h < three; h++)
{
digitalWrite(yAxis[h], LOW);
}
}
else if(count%2 == 0)
{
digitalWrite(xAxis[4],HIGH);
for(int h = 0; h < four; h++)
{
digitalWrite(yAxis[h], LOW);
}
}
else
{
digitalWrite(xAxis[5],HIGH);
for(int h = 0; h < five; h++)
{
digitalWrite(yAxis[h], LOW);
}
}
delay(1);
}
int add = random(-1,2);
if(add + zero >= 0 && add + zero <6)
{
zero+=add;
}
add = random(-1,2);
if(add + one >= 0 && add + one <6)
{
one+=add;
}
add = random(-1,2);
if(add + two >= 0 && add + two <6)
{
two+=add;
}
add = random(-1,2);
if(add + three >= 0 && add + three <6)
{
three+=add;
}
add = random(-1,2);
if(add + four >= 0 && add + four <6)
{
four+=add;
}
add = random(-1,2);
if(add + five >= 0 && add + five <6)
{
five+=add;
}
}
}
void ohio(int duration)
{
int count = 0;
while(count < duration)
{
allOff();
count ++;
if(count%4 == 0)
{
digitalWrite(xAxis[0],HIGH);
digitalWrite(xAxis[2],HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
}
else if(count%3==0)
{
digitalWrite(xAxis[1], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[5],LOW);
}
else if(count%2==0)
{
digitalWrite(xAxis[3],HIGH);
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5],LOW);
}
else
{
XYOn(4,2);
}
delay(1);
}
allOff();
delay(10);
while(count < duration *2)
{
allOff();
count ++;
if(count%3 == 0)
{
digitalWrite(xAxis[3],HIGH);
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
}
else if(count%2==0)
{
digitalWrite(xAxis[0],HIGH);
digitalWrite(xAxis[2], HIGH);
digitalWrite(xAxis[4], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[5],LOW);
}
else
{
digitalWrite(xAxis[1],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
}
void ohioScroll(int duration)
{
int count = 0;
while(count < duration)
{
allOff();
count++;
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
delay(1);
}
count = 0;
while(count < duration)
{
allOff();
count++;
if(count%2==0)
{
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
}
else
{
digitalWrite(xAxis[5], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
count = 0;
while(count < duration)
{
allOff();
count++;
if(count%2==0)
{
digitalWrite(xAxis[3],HIGH);
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
}
else
{
digitalWrite(xAxis[4], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
count = 0;
while(count < duration)
{
allOff();
count++;
if(count%2==0)
{
digitalWrite(xAxis[2],HIGH);
digitalWrite(xAxis[4],HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
}
else
{
digitalWrite(xAxis[3], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
count = 0;
while(count < duration)
{
allOff();
count++;
if(count%3==0)
{
digitalWrite(xAxis[1],HIGH);
digitalWrite(xAxis[3],HIGH);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
}
else if(count%2==0)
{
digitalWrite(xAxis[2], HIGH);
digitalWrite(yAxis[0], LOW);
digitalWrite(yAxis[5],LOW);
}
else
{
digitalWrite(xAxis[5],HIGH);
digitalWrite(yAxis[0],LOW);
digitalWrite(yAxis[1], LOW);
digitalWrite(yAxis[2], LOW);
digitalWrite(yAxis[3], LOW);
digitalWrite(yAxis[4], LOW);
digitalWrite(yAxis[5],LOW);
}
delay(1);
}
count = 0;
...
This file has been truncated, please download it to see its full contents.
_WSuxLGLqeO.jpg?auto=compress%2Cformat&w=60&h=60&fit=min&dpr=2)



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments