



// This sketch is written by MBcreates (www.YouTube.com/MBcreates)
// this sketch is in the public domain and free to use in any way you see fit
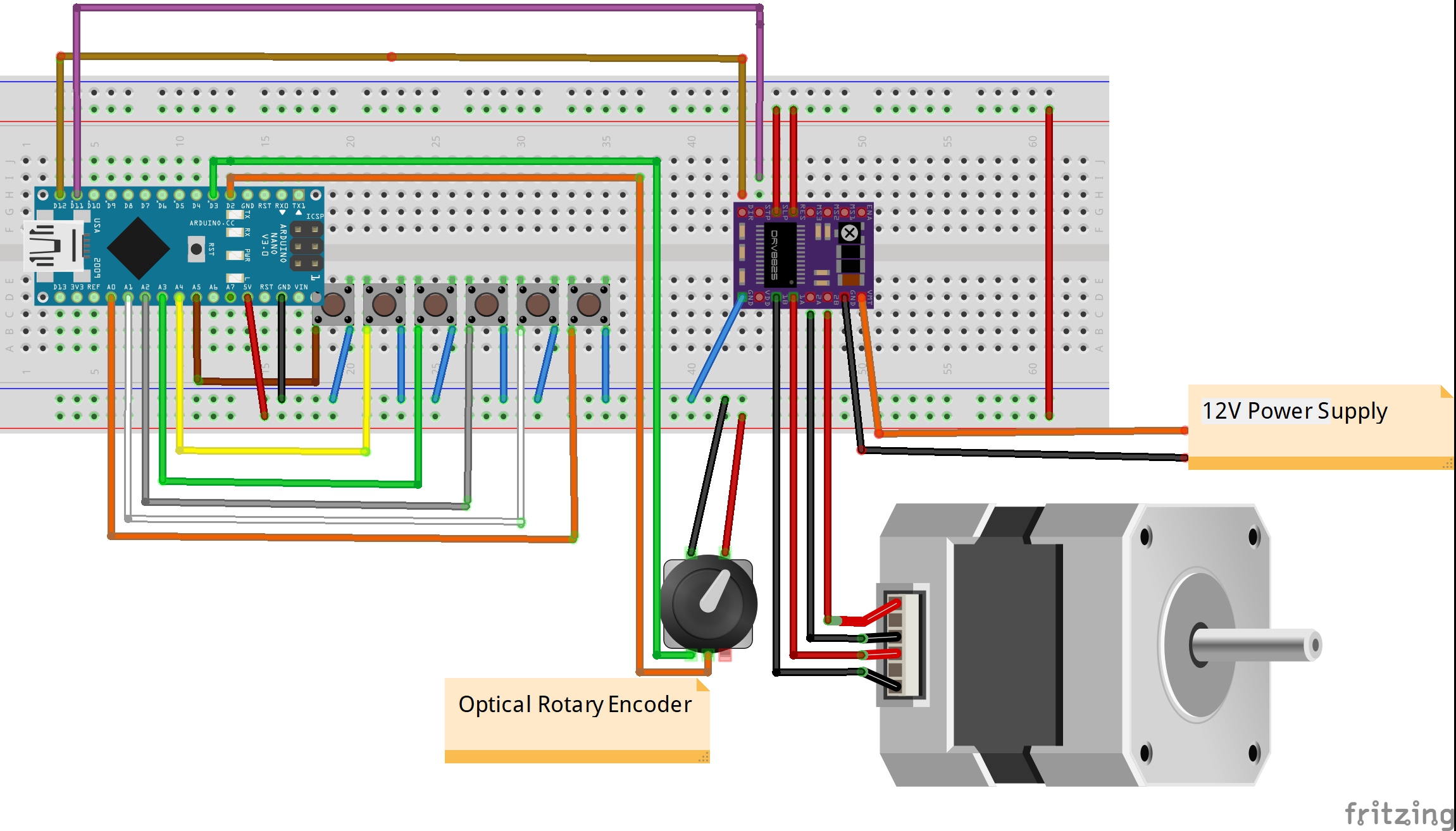
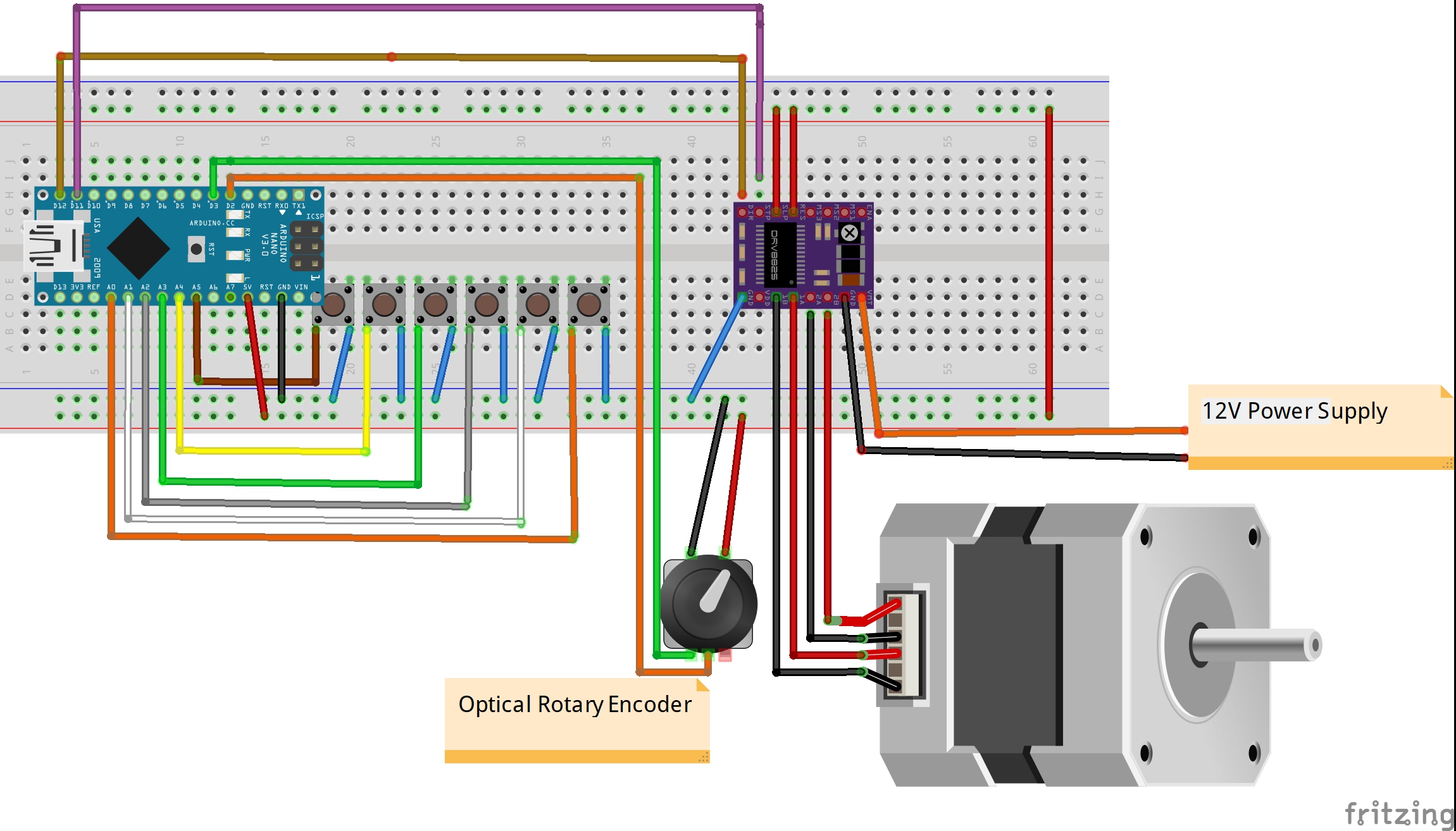
#define DIR 12 // DRV8825 DIR pin is connected to Arduino pin 12
#define STEP 11 // DRV8825 STEP pin is connected to Arduino pin 11
#define P1 14 // push button 1 is connected to Arduino pin A0
#define P2 15 // push button 2 is connected to Arduino pin A1
#define P3 16 // push button 3 is connected to Arduino pin A2
#define P4 17 // push button 4 is connected to Arduino pin A3
#define P5 18 // push button 5 is connected to Arduino pin A4
#define P6 19 // push button 6 is connected to Arduino pin A5
int DELAY = 1500; // delay between steps in microsenconds
int DISTANCE = 0 ; // Counter for steps
boolean GO = false; // stepper ON or OFF
int DEST = 0; // variable to store selected DESTINATION
int SOURCE =0; // variable to store current POSITION
int DIFF = 0; // variable to store the diffrence between POSISTION and DESTINATION
int DIFFplus=0; // variable to store a value to check what the shortest direction to DESTINATION is
int DIFFmin=0; // variable to store a value to check what the shortest direction to DESTINATION is
void setup() {
pinMode(DIR,OUTPUT); // pin 12 is set to OUTPUT
pinMode(STEP,OUTPUT); // pin 11 is set to OUTPUT
pinMode(P1,INPUT_PULLUP); // Arduino pin A0 is set to INPUT_PULLUP
pinMode(P2,INPUT_PULLUP); // Arduino pin A1 is set to INPUT_PULLUP
pinMode(P3,INPUT_PULLUP); // Arduino pin A2 is set to INPUT_PULLUP
pinMode(P4,INPUT_PULLUP); // Arduino pin A3 is set to INPUT_PULLUP
pinMode(P5,INPUT_PULLUP); // Arduino pin A4 is set to INPUT_PULLUP
pinMode(P6,INPUT_PULLUP); // Arduino pin A5 is set to INPUT_PULLUP
}
void loop() {
/////////////////////////////// Selecting DESTINTATION by PUSH BUTTON
/*
The test setup in the video uses a 1.8 degree stepper motor. The Stepper driver is set to full step. This makes for 200 steps for a full rotation.
Six diffrent posistion make for 33,333 steps between posistions. I used vife times 33 steps and one time 35 steps to avoid decimal values
*/
if(!digitalRead(P1)) // when button 1 is pushed, DESTINATION is set to 0
{
DEST=0;
}
if(!digitalRead(P2)) // when button 2 is pushed, DESTINATION is set to 33
{
DEST=33;
}
if(!digitalRead(P3)) // when button 3 is pushed, DESTINATION is set to 66
{
DEST=66;
}
if(!digitalRead(P4)) // when button 4 is pushed, DESTINATION is set to 99
{
DEST=99;
}
if(!digitalRead(P5)) // when button 5 is pushed, DESTINATION is set to 132
{
DEST=132;
}
if(!digitalRead(P6)) // when button 6 is pushed, DESTINATION is set to 165
{
DEST=165;
}
DIFF=100-abs(abs(SOURCE-DEST)-100); // the diffrence between SOURCE and DESTINATION is callculated in a way the value is always positive
// the two calculations below check the fastest way around a circle
// learn more here: https://stackoverflow.com/questions/7428718/algorithm-or-formula-for-the-shortest-direction-of-travel-between-two-degrees-on
DIFFplus=100-abs(abs((SOURCE+1)-DEST)-100); // the diffrence between SOURCE+1 and DESTINATION is callculated in a way the value is always positive
DIFFmin=100-abs(abs((SOURCE-1)-DEST)-100); // the diffrence between SOURCE-1 and DESTINATION is callculated in a way the value is always positive
if(DIFFplus>=DIFFmin) // rotaion dirrection is set
{
digitalWrite(DIR,LOW);
}
else
{
digitalWrite(DIR,HIGH);
}
if(DEST!=SOURCE){ // if there is a diffrence between DEST and SOURCE, GO is set to true
GO=true;
while (GO) // while there is a diffrence between DEST and SOURCE the motor steps
{
digitalWrite(STEP,HIGH);
delayMicroseconds(DELAY);
digitalWrite(STEP,LOW);
delayMicroseconds(DELAY);
DISTANCE++; // DISTANCE increases with 1 after every step
if (DISTANCE==DIFF) // when the DISTANCE is equal to DIFF, the
{
GO=false; // GO is set to false
SOURCE=DEST; // SOURCE is set to DEST (now both values are the same)
DISTANCE=0; // the DISTANCE counter is reset to zero
}
}
}
}
// This sketch is written by MBcreates (www.YouTube.com/MBcreates)
// this sketch is in the public domain and free to use in any way you see fit
/*
the Rotary Encoder code part of this sketch was found on:
https://github.com/jumejume1/Arduino/blob/master/ROTARY_ENCODER/ROTARY_ENCODER.ino
thanks jumejume1 for sharing.
*/
#define DIR 12 // DRV8825 DIR pin is connected to Arduino pin 12
#define STEP 11 // DRV8825 STEP pin is connected to Arduino pin 11
#define P1 14 // push button 1 is connected to Arduino pin A0
#define P2 15 // push button 2 is connected to Arduino pin A1
#define P3 16 // push button 3 is connected to Arduino pin A2
#define P4 17 // push button 4 is connected to Arduino pin A3
#define P5 18 // push button 5 is connected to Arduino pin A4
#define P6 19 // push button 6 is connected to Arduino pin A5
int DELAY = 380; // delay between steps in microsenconds
int DISTANCE=0; // Counter for steps
int DEST = 0; // variable to store selected DESTINATION
int SOURCE =0; // variable to store current POSITION
int DIFF = 0; // variable to store the diffrence between POSISTION and DESTINATION
int DIFFplus=0; // variable to store a value to check what the shortest direction to DESTINATION is
int DIFFmin=0; // variable to store a value to check what the shortest direction to DESTINATION is
int encoderA; // variable to store the encoder value before a movement
int encoderB; // variable to store the encoder value after a movement
int encoderD; // the diffrence between encoderA and encoderB
int counter = 0; //variable to store the encoder value
boolean GO = false; // stepper ON or OFF
boolean PRINT=false; // variable used to print the encoderD value
void setup() {
Serial.begin(9600); // start serial montior
pinMode(DIR,OUTPUT); // pin 12 is set to OUTPUT
pinMode(STEP,OUTPUT); // pin 11 is set to OUTPUT
pinMode(P1,INPUT_PULLUP); // Arduino pin A0 is set to INPUT_PULLUP
pinMode(P2,INPUT_PULLUP); // Arduino pin A1 is set to INPUT_PULLUP
pinMode(P3,INPUT_PULLUP); // Arduino pin A2 is set to INPUT_PULLUP
pinMode(P4,INPUT_PULLUP); // Arduino pin A3 is set to INPUT_PULLUP
pinMode(P5,INPUT_PULLUP); // Arduino pin A4 is set to INPUT_PULLUP
pinMode(P6,INPUT_PULLUP); // Arduino pin A5 is set to INPUT_PULLUP
// this rotary encoder sketch uses the interupt pins on the arduino. note every pin can be used for this purpose
// learn more here: https://www.arduino.cc/reference/en/language/functions/external-interrupts/attachinterrupt/
pinMode(2, INPUT_PULLUP); // internal pullup input pin 2
pinMode(3, INPUT_PULLUP); // internal pullup input pin 3
//Setting up interrupt
//A rising pulse from encodenren activated ai0(). AttachInterrupt 0 is DigitalPin nr 2 on moust Arduino.
attachInterrupt(0, ai0, RISING);
//B rising pulse from encodenren activated ai1(). AttachInterrupt 1 is DigitalPin nr 3 on moust Arduino.
attachInterrupt(1, ai1, RISING);
}
void loop() {
//Serial.println(counter);
/////////////////////////////// Selecting DESTINTATION by PUSH BUTTON
/*
The test setup in the video uses a 1.8 degree stepper motor. The Stepper driver is set to full step. This makes for 200 steps for a full rotation.
Six diffrent posistion make for 33,333 steps between posistions. I used vife times 33 steps and one time 35 steps to avoid decimal values
*/
if(!digitalRead(P1)) // when button 1 is pushed, DESTINATION is set to 0
{
DEST=0;
}
if(!digitalRead(P2)) // when button 2 is pushed, DESTINATION is set to 33
{
DEST=33;
}
if(!digitalRead(P3)) // when button 3 is pushed, DESTINATION is set to 66
{
DEST=66;
}
if(!digitalRead(P4)) // when button 4 is pushed, DESTINATION is set to 99
{
DEST=99;
}
if(!digitalRead(P5)) // when button 5 is pushed, DESTINATION is set to 132
{
DEST=132;
}
if(!digitalRead(P6)) // when button 6 is pushed, DESTINATION is set to 165
{
DEST=165;
}
DIFF=100-abs(abs(SOURCE-DEST)-100); // the diffrence between SOURCE and DESTINATION is callculated in a way the value is always positive
// the two calculations below check the fastest way around a circle
// learn more here: https://stackoverflow.com/questions/7428718/algorithm-or-formula-for-the-shortest-direction-of-travel-between-two-degrees-on
DIFFplus=100-abs(abs((SOURCE+1)-DEST)-100); // the diffrence between SOURCE+1 and DESTINATION is callculated in a way the value is always positive
DIFFmin=100-abs(abs((SOURCE-1)-DEST)-100); // the diffrence between SOURCE-1 and DESTINATION is callculated in a way the value is always positive
if(DIFFplus>=DIFFmin) // rotaion dirrection is set
{
digitalWrite(DIR,LOW);
}
else
{
digitalWrite(DIR,HIGH);
}
if(DEST!=SOURCE)
{ // if there is a diffrence between DEST and SOURCE, GO is set to true
GO=true;
encoderA = counter; // the encoder position before the movement start is stored encoder A
}
while (GO) // while there is a diffrence between DEST and SOURCE the motor steps
{
digitalWrite(STEP,HIGH);
delayMicroseconds(DELAY);
digitalWrite(STEP,LOW);
delayMicroseconds(DELAY);
DISTANCE++; // DISTANCE increases with 1 after every step
if (DISTANCE==DIFF) // when the DISTANCE is equal to DIFF, the
{
GO=false; // GO is set to false
SOURCE=DEST; // SOURCE is set to DEST (now both values are the same)
DISTANCE=0; // the DISTANCE counter is reset to zero
PRINT=true; // PRINT is set to true
}
}
delay(50); //wait until the setups is stoped completely
encoderB = counter; // the encoder position is stored in encoderB
encoderD=32752+(1/2)-abs(abs(encoderA-encoderB)-32752+(1/2)); // the diffrence between encoder A & B is calculated and stored in encoderD
/*
the optical rotary encoder used in this setup can go from 0 to 65504 (clockwise) or from 0 to -65504 (counter clockwise).
the forumula above calculates always a postive value and also ensures that when the max encoder value is reached the encoderD value is still correct
this encoder setup gives a value of 1200 for a full rotation of the stepper motor
*/
if(PRINT) // the encoderD value is printed one time after each movement
{
Serial.println(encoderD);
PRINT=false;
}
} // end of porgram
void ai0() {
// ai0 is activated if DigitalPin nr 2 is going from LOW to HIGH
// Check pin 3 to determine the direction
if(digitalRead(3)==LOW) {
counter++;
}else{
counter--;
}
}
void ai1() {
// ai0 is activated if DigitalPin nr 3 is going from LOW to HIGH
// Check with pin 2 to determine the direction
if(digitalRead(2)==LOW) {
counter--;
}else{
counter++;
}
}
// This sketch is written by MBcreates (www.YouTube.com/MBcreates)
// this sketch is in the public domain and free to use in any way you see fit
/*
the Rotary Encoder code part of this sketch was found on:
https://github.com/jumejume1/Arduino/blob/master/ROTARY_ENCODER/ROTARY_ENCODER.ino
thanks jumejume1 for sharing.
*/
#define DIR 12 // DRV8825 DIR pin is connected to Arduino pin 12
#define STEP 11 // DRV8825 STEP pin is connected to Arduino pin 11
#define P1 14 // push button 1 is connected to Arduino pin A0
#define P2 15 // push button 2 is connected to Arduino pin A1
#define P3 16 // push button 3 is connected to Arduino pin A2
#define P4 17 // push button 4 is connected to Arduino pin A3
#define P5 18 // push button 5 is connected to Arduino pin A4
#define P6 19 // push button 6 is connected to Arduino pin A5
int DELAY = 400; // delay between steps in microsenconds(the initial movement)
int DELAY_SLOW = 1200; // delay between steps in microsenconds(the second reverse movement)
int BRAKE = 50; // delay between end of rotation and encoderB measurment in miliseconds
int OFFSET= 20; // value to set the number of steps the stepper should overshoot its target
int encoderA; //encoder before moving
int encoderB; //encoder after moving
int encoderD; //econder Delta
volatile unsigned int temp = 0; //This variable will increase or decrease depending on the rotation of encoder
int counter = 0;
int DISTANCE=0;
int I_OVERSHOT=0;
int CORRECTED=0;
int CORRECT=0;
int LOR=0;
boolean GO = false;
boolean DIR_REV = false;
int DEST = 0;
int SOURCE =0;
int DIFF = 0;
int DIFFplus=0;
int DIFFmin=0;
int CHECK=0;
int BOUNCE=100;
boolean C1=false;
boolean C2=false;
boolean C3=false;
boolean C4=false;
boolean REVERSE=false;
void setup() {
Serial.begin(9600);
pinMode(2, INPUT_PULLUP); // internal pullup input pin 2
pinMode(3, INPUT_PULLUP); // internal pullup input pin 3
//Setting up interrupt
//A rising pulse from encodenren activated ai0(). AttachInterrupt 0 is DigitalPin nr 2 on moust Arduino.
attachInterrupt(0, ai0, RISING);
//B rising pulse from encodenren activated ai1(). AttachInterrupt 1 is DigitalPin nr 3 on moust Arduino.
attachInterrupt(1, ai1, RISING);
pinMode(DIR,OUTPUT);
pinMode(STEP,OUTPUT);
pinMode(P1,INPUT_PULLUP);
pinMode(P2,INPUT_PULLUP);
pinMode(P3,INPUT_PULLUP);
pinMode(P4,INPUT_PULLUP);
pinMode(P5,INPUT_PULLUP);
pinMode(P6,INPUT_PULLUP);
}
void loop() {
//Serial.println(counter);
if(!digitalRead(P1))
{
delay(BOUNCE);
DEST=0;
}
if(!digitalRead(P2))
{
delay(BOUNCE);
DEST=200;
}
if(!digitalRead(P3))
{
delay(BOUNCE);
DEST=400;
}
if(!digitalRead(P4))
{
delay(BOUNCE);
DEST=600;
}
if(!digitalRead(P5))
{
delay(BOUNCE);
DEST=800;
}
if(!digitalRead(P6))
{
delay(BOUNCE);
DEST=1000;
}
DIFF=600-abs(abs(SOURCE-DEST)-600);
DIFFplus=600-abs(abs((SOURCE+1)-DEST)-600);
DIFFmin=600-abs(abs((SOURCE-1)-DEST)-600);
/////////////////////// Direction
if(DIFFplus>DIFFmin)
{
digitalWrite(DIR,LOW); //counter CLOCK wise
}
if(DIFFplus<=DIFFmin)
{
digitalWrite(DIR,HIGH); //CLOCK wise
//Serial.println("X");
}
//
//////////////////////////////Movement
if(DEST!=SOURCE){ // diffrence between Source and Destination is tested
GO=true;
encoderA = counter; // the position before the movement start is stored encoder A
// Serial.print("SOURCE");
// Serial.println(SOURCE);
// Serial.print("DEST");
// Serial.println(DEST);
// Serial.print("DIFF");
// Serial.println(DIFF);
// Serial.print("DIFFplus");
// Serial.println(DIFFplus);
// Serial.print("DIFFmin");
//Serial.println(DIFFmin);
}
while (GO)
{
digitalWrite(STEP,HIGH);
delayMicroseconds(DELAY);
digitalWrite(STEP,LOW);
delayMicroseconds(DELAY);
encoderB = counter;
encoderD=32752+(1/2)-abs(abs(encoderA-encoderB)-32752+(1/2)); // the diffrence between encoder A & B is calculated and stored in encoderD
if (encoderD > (DIFF+OFFSET))
{
GO=false;
//SOURCE=DEST; ///// remove this line
C1=true;
}
}
if(C1)
{
delay(BRAKE); // make sure the setup stoped completely
encoderB = counter;
encoderD=32752+(1/2)-abs(abs(encoderA-encoderB)-32752+(1/2)); // update encoderD
// Serial.print("encoderD ");
//Serial.println(encoderD);
I_OVERSHOT=encoderD-DIFF; // POS is set to the value the stepper is stoped
C1=false;
C2=true;
// Serial.print("I_OVERSHOT ");
// Serial.println(I_OVERSHOT);
}
while(C2)
{
if(DIFFplus>DIFFmin)
{
digitalWrite(DIR,HIGH); //clock
DIR_REV=false;
}
if(DIFFplus<=DIFFmin)
{
digitalWrite(DIR,LOW); //counter
DIR_REV=true;
}
C2=false;
REVERSE=true;
encoderA = counter; // the position before the movement start is stored encoder A
// Serial.print("LOR");
// Serial.println(LOR);
}
while (REVERSE)
{
// Serial.println("Y");
digitalWrite(STEP,HIGH);
delayMicroseconds(DELAY_SLOW);
digitalWrite(STEP,LOW);
delayMicroseconds(DELAY_SLOW);
encoderB = counter;
encoderD=32752+(1/2)-abs(abs(encoderA-encoderB)-32752+(1/2)); // the diffrence between encoder A & B is calculated and stored in encoderD
if(encoderD>=I_OVERSHOT) //
{
REVERSE=false;
C3=true;
}
}
if(C3)
{
delay(BRAKE); // make sure the setup stoped completely
encoderB = counter;
encoderD=32752+(1/2)-abs(abs(encoderA-encoderB)-32752+(1/2)); // the diffrence between encoder A & B is calculated and stored in encoderD
CORRECTED = encoderD;
C3=false;
C4=true;
// Serial.print("CORRECTED ");
// Serial.println(CORRECTED);
}
while(C4)
{
if(CORRECTED==I_OVERSHOT) // the correction was spott. SOURCE can be set to DEST and no correction is needed
{
SOURCE=DEST;
// Serial.println("1");
}
if((CORRECTED < I_OVERSHOT)&& (DIR_REV)) // (1) clock high (2) counter low // UNDERCORRECTED xx
{
SOURCE = (DEST + (I_OVERSHOT-CORRECTED)) ;
DEST=SOURCE;
// Serial.print("SOURCE ");
// Serial.println(SOURCE);
// Serial.print("DEST ");
// Serial.println(DEST);
// Serial.println("2");
// Serial.println();
}
/* pos 0>>> pos 200
* pos 0>>> pos 210
*
* pos205<<<pos 210 diffrence = CORRECTED
new source = dest + corrected
...
1000>>>0
* I_over 1000>>>50
* 30<<<50
new source(previous dest + CORRECTED = 0+20 = 205
*/
if((CORRECTED > I_OVERSHOT)&& (DIR_REV)) // (1) clock high (2) counter low // overcorrect xx
{
SOURCE = (DEST - (CORRECTED-I_OVERSHOT)) ;
DEST=SOURCE;
// note: DEST and SOURCE can become negative, fix that whith something
// Serial.print("SOURCE ");
// Serial.println(SOURCE);
// Serial.print("DEST ");
// Serial.println(DEST);
// Serial.println("3");
// Serial.println();
}
if(SOURCE<0)
{
DEST = 1200+SOURCE;
SOURCE=DEST;
//Serial.println("VALUE IN BOX 3 IS CORRECTED ");
}
if((CORRECTED < I_OVERSHOT)&& (!DIR_REV)) //(1)counter high (2) CLOCK low //UNDERCORRECTED
{
SOURCE= (DEST-(I_OVERSHOT-CORRECTED)) ;
DEST=SOURCE;
// Serial.print("SOURCE ");
// Serial.println(SOURCE);
//Serial.print("DEST ");
//Serial.println(DEST);
// Serial.println("4");
// Serial.println();
}
if((CORRECTED > I_OVERSHOT)&& (!DIR_REV)) //(1)counter high (2) CLOCK low//OVERCORRECTED
{
SOURCE= (DEST-(I_OVERSHOT-CORRECTED)) ;
DEST=SOURCE;
// Serial.print("SOURCE ");
//Serial.println(SOURCE);
// Serial.print("DEST ");
//Serial.println(DEST);
// Serial.println("5");
// Serial.println();
}
C4=false;
}
} // end of porgram
/*
example: initial is clockwise
Source = 0
DEST = 200
Diff = 200
I_OVERSHOT = 35 (possitie 235)
REVERSE >
encoderD 40
R_overshot = (encoderD - I_OVERSHOT) = 5 (positie 195)
SOURCE = DEST + (-1* R_overshot) = 195
SOURCE=600-abs(abs(DEST-I_OVERSHOT)-600);
.....
Source = 1000
DEST = 0
Diff = 200
I_OVERSHOT = 35 (possitie 35)
REVERSE >
encoderD 40
R_overshot = (encoderD - I_OVERSHOT) = 5 (positie 1195)
SOURCE = DEST + (-1* R_overshot) = 195
0
SOURCE=600-abs(abs(DEST-I_OVERSHOT)-600);
...............
example: initial is counter clockwise
Source = 0
DEST = 1000
Diff = 200
I_OVERSHOT = 35 (possitie 965)
REVERSE >
encoderD 40
R_overshot = (encoderD - I_OVERSHOT) = 5 (positie 1005)
SOURCE = DEST + R_overshot
........................................
*/
/*
if(encoderD > OVERSHOT)
{
}
// Serial.print("CORRECT");
// Serial.println(CORRECT);
SOURCE= (DEST +(CORRECT*LOR));
DEST=SOURCE;
C3=false;
// Serial.print("SOURCE");
// Serial.println(SOURCE);
Serial.println();
}
*/
void ai0() {
// ai0 is activated if DigitalPin nr 2 is going from LOW to HIGH
// Check pin 3 to determine the direction
if(digitalRead(3)==LOW) {
counter++;
}else{
counter--;
}
}
void ai1() {
// ai0 is activated if DigitalPin nr 3 is going from LOW to HIGH
// Check with pin 2 to determine the direction
if(digitalRead(2)==LOW) {
counter--;
}else{
counter++;
}
}
/*
Serial.print("counter");
Serial.println(counter);
Serial.print("encoderA");
Serial.println(encoderA);
Serial.print("encoderB");
Serial.println(encoderB);
Serial.print("counter");
Serial.println(counter);
Serial.print("delta");
Serial.println(encoderD);
Serial.println("X");
*/
/*
Serial.print("encoderA1");
Serial.println(encoderA);
Serial.print("encoderB1");
Serial.println(encoderB);
Serial.print("STOPPED");
Serial.println(STOPPED);
*/

{kind=link}
Comments