

Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
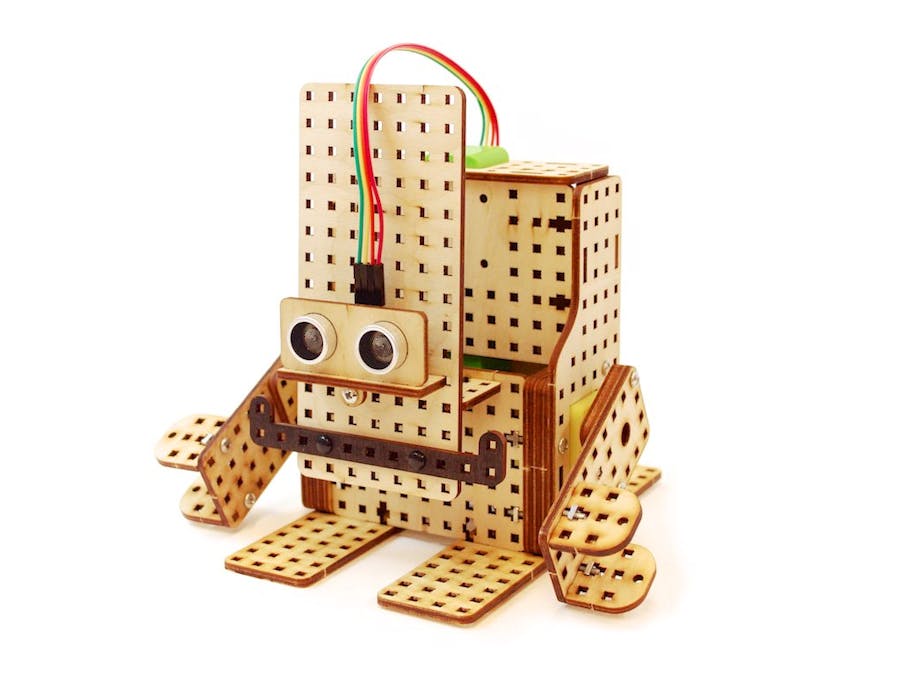
Gorilla robot is a two-legged variation made out of vehicle chassis of the Rover robot.
Parts list- LOFI Brain controller
- Powerbank
- Pair of DC geared motors
- Set of wooden parts
- Distance sensor – HC-SR04
1. Attach DC motor to the chassis side parts with a help of grip blocks. Pay attention to making both of the motors in mirrored arrangement.
2. Long rectangular block will be used as gorilla's head. Mount the distance sensor (HC-SR04) in its grip and attach it in the middle of the face block. Add the “smile block” and connect the face to the bottom block of the chassis with a help of a connector block.
3. Mount the LOFI Brain controller to the biggest block of the of the gorilla body.
4. Connect all the parts of gorilla body together. Use 20 mm long nuts to connect blocks near motors` grips.
5. Attach two long blocks to bottom of gorilla body as its legs.
6. Build gorilla`s hands.
7. Put the powerbank in its grip block and mount it on the top of gorilla's body. Mount gorilla's arms on the motors` shafts.
8. Your gorilla robot is ready!
- Program it to avoid obstacles with the distance sensor
- Control it with smartphone/tablet over bluetooth
- Instead of distance sensor use two light sensors as gorilla's eyes and program it as light follower
- Control it with SCRATCH







Comments