This project is a smart RC car controlled from a smartphone using the ESP32-S3 Uno and the Blynk IoT app. It allows you to move the car forward, backward, left, and right in real-time via Wi-Fi.
I built this project to learn more about IoT-based control systems and explore how ESP32 can be used for wireless robotics. It’s also a fun way to combine coding, electronics, and mobile control.
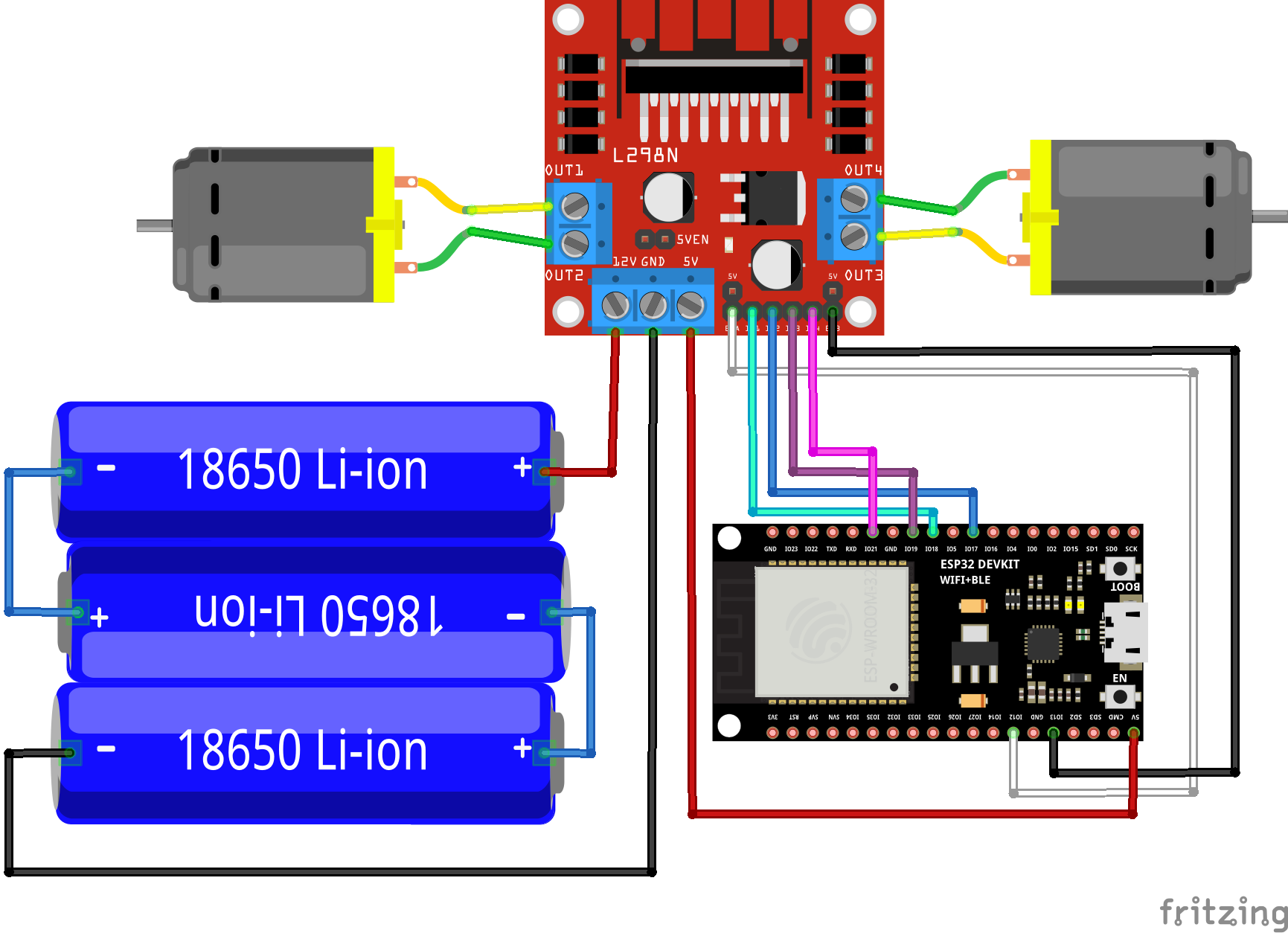
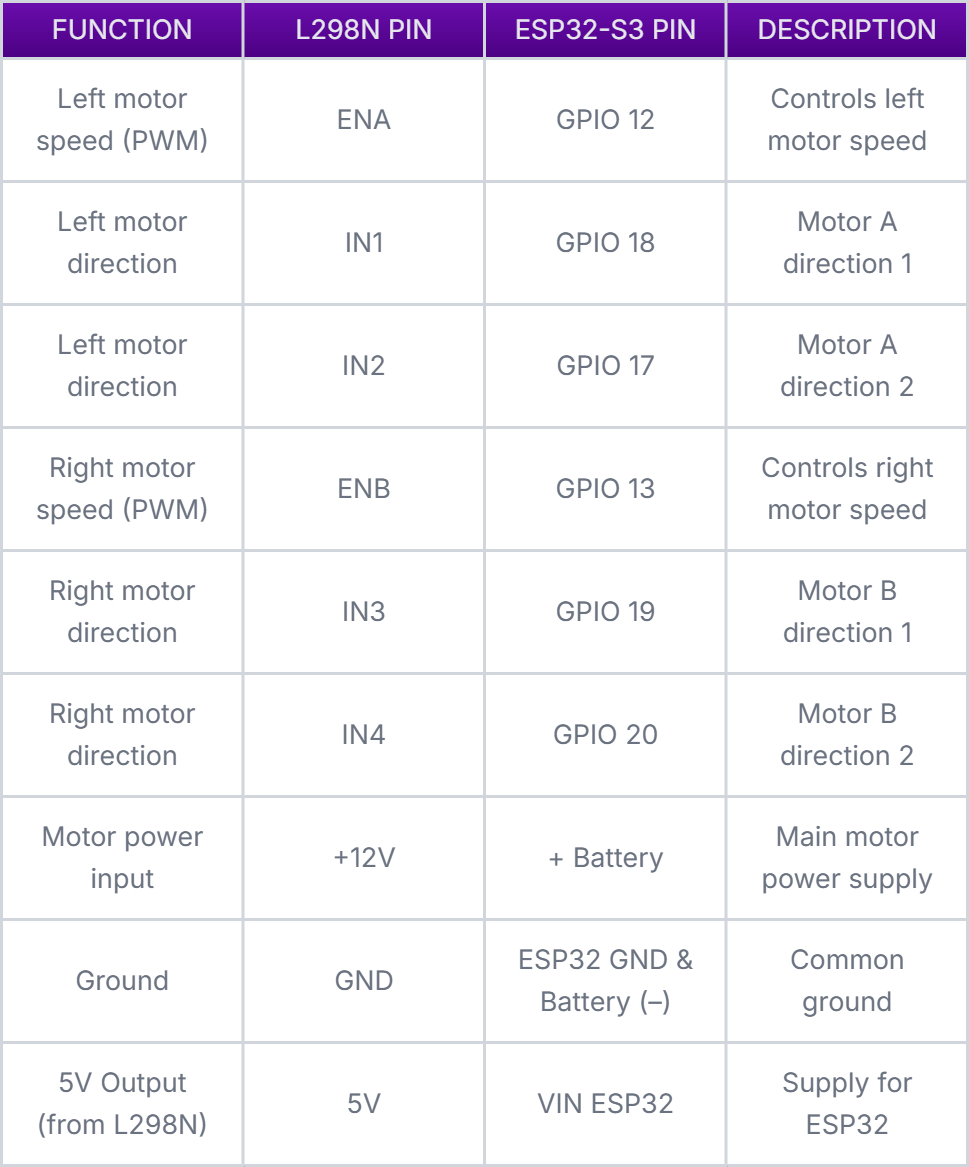
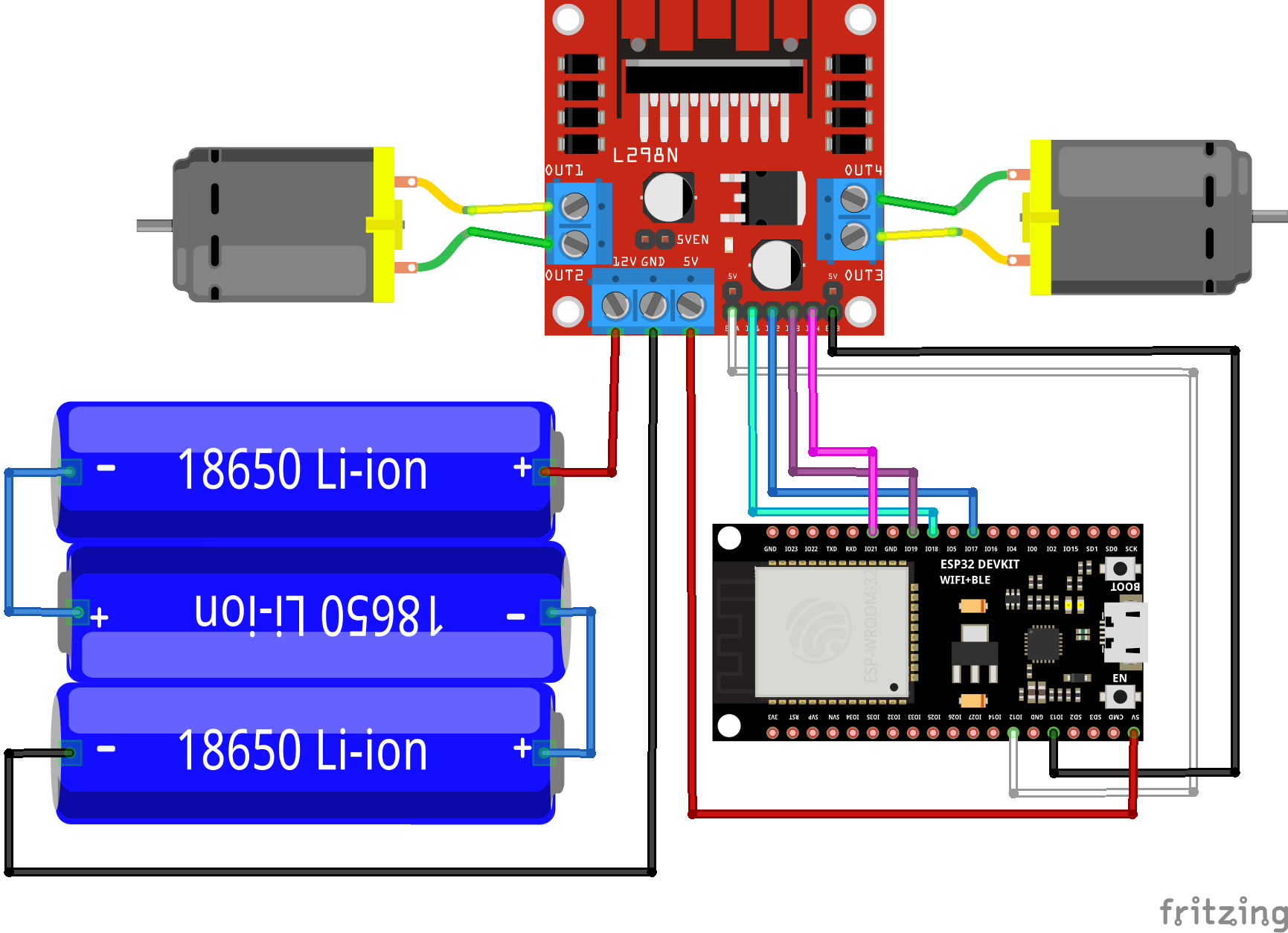
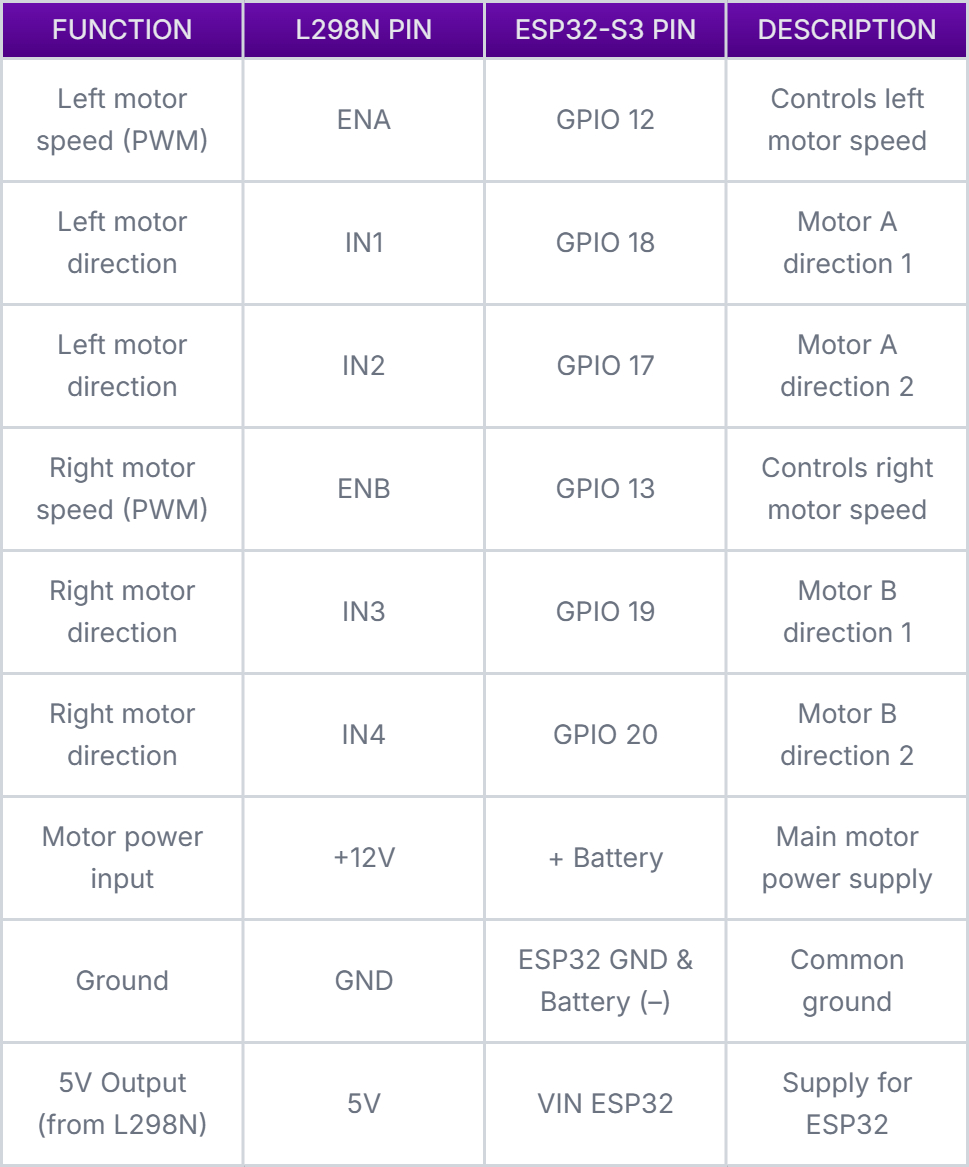
The ESP32-S3 connects to Wi-Fi and links to a Blynk dashboard on the phone. When you press a button in the app, Blynk sends commands to the ESP32 through the cloud. The ESP32 then drives the L298N motor driver, which controls the DC motors for movement. Power comes from a rechargeable battery pack, making it fully portable.
IMPORTANT!
Before you make the program for this IoT RC Car, first you must understand how to make an application or virtual buttons in Blynk, to make it easier when creating the program.
How the button look on phone
If you want to use a chassis like this, you can look for it on online marketplace with keyword '2WD Aluminum Smart Robot Car Chassis Kit DIY'













_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments