

Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
 |
| |||||
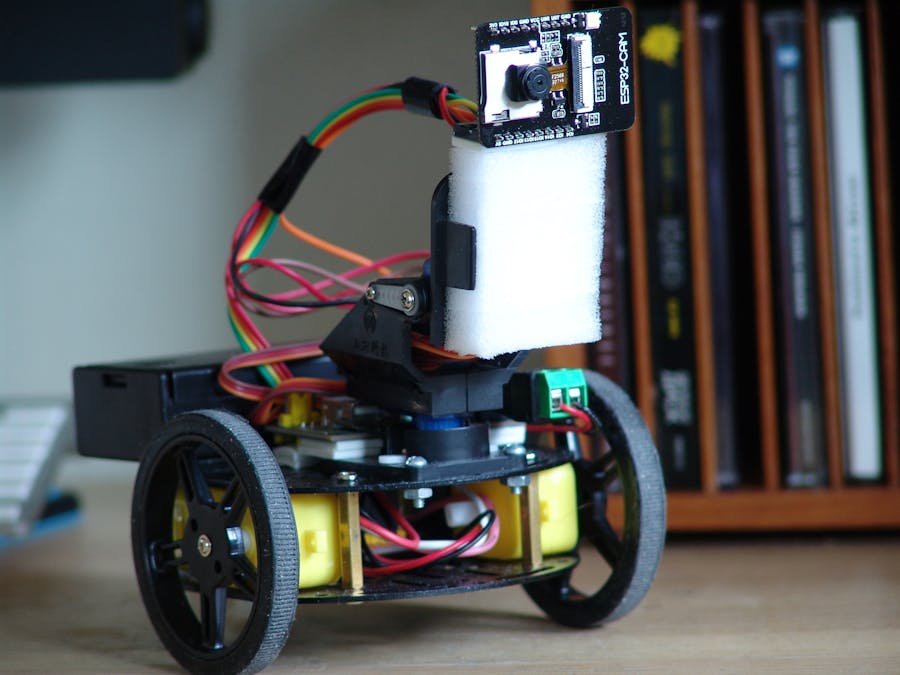
Imagine if you have a robot that has camera on board and can be controlled through the Internet.
It would open a lot of opportunities of using it.
For example, you could send the robot to the kitchen to check if you accidentally left the kettle on the stove!
I found that with ESP32-CAM it can be done easily.
The ESP32-CAM is a very small camera module with the ESP32-S chip that costs approximately $10-$15.
The ESP32-CAM module can be programmed with Arduino IDE. The ESP32-CAM module also has several GPIO pins to connect to external hardware.
HOW TO BUILD THE ROBOTHere are the main parts we will need for the project.
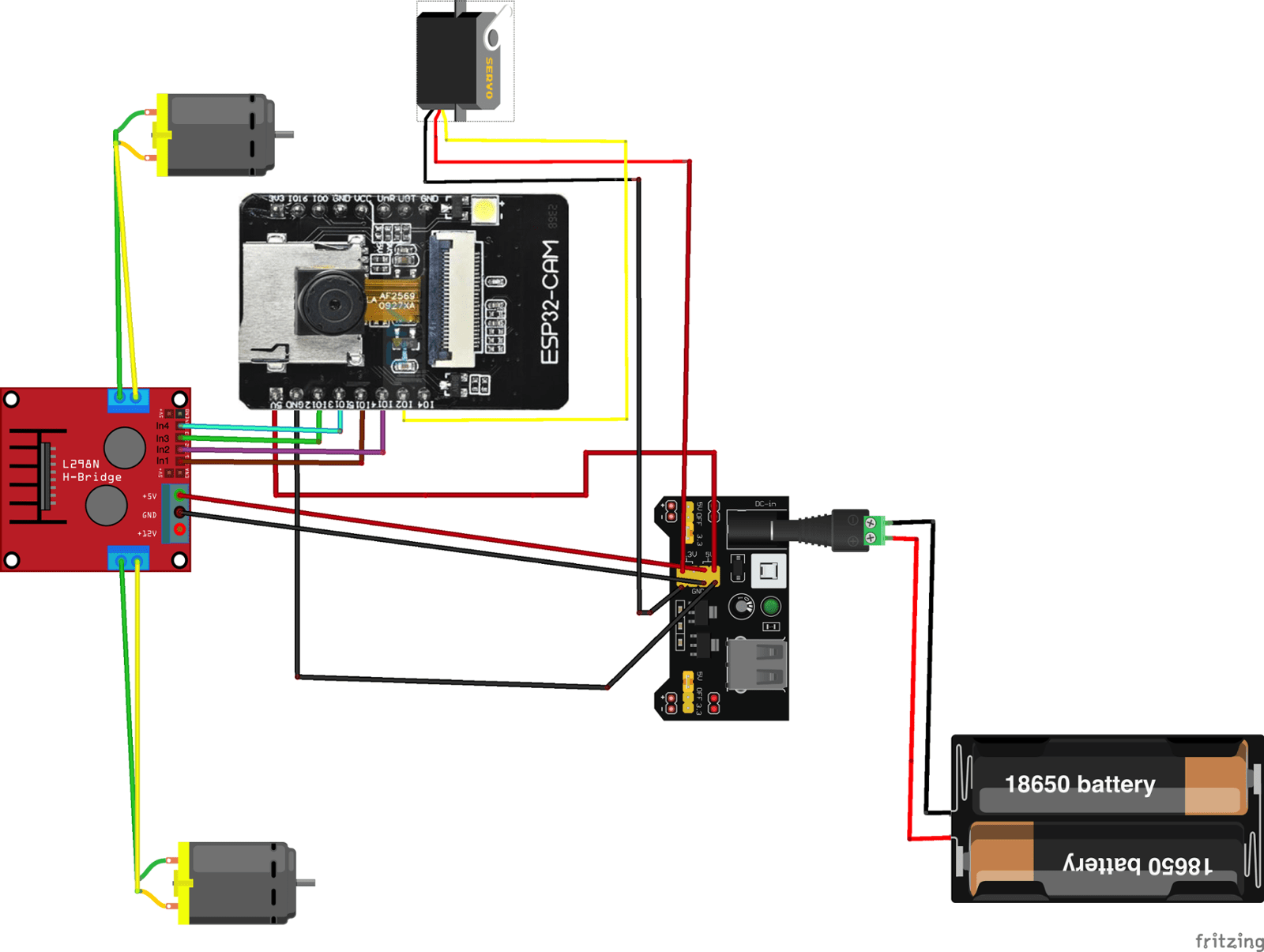
Assemble the robot chassis with two DC motors, 3 wheels and L298N motor drive controller.
Using MB102 Breadboard Power Supply Module is optional. You can always take 5V and Ground for ESP32-CAM and servo motor from the L298N motor driver, but I found that with the MB102 it is much more convenient. The power supple module has a power button and gives you more flexibility with wiring.
In order to attach the module the the chassis platform, I removed the pins on the bottom of the MB102. Then, I attached it to the top of the chassis with double sided mounting tape.
Connect all parts using the schematic. Use a piece of foam and double sided mounting tape to attach the ESP32-CAM to the Pan/Tilt platform.
Install the ESP32 Add-on on Arduino IDE:
Follow one of the next tutorials to install the ESP32 add-on, if you haven’t already:
Installing the ESP32 Board in Arduino IDE (Windows instructions)
Installing the ESP32 Board in Arduino IDE (Mac and Linux instructions)
Make sure that you have two tabs with code in the Arduino IDE:
Before uploading the code, you need to insert your network credentials in the following variables:
const char* ssid = "Your_WIFI_Network"
const char* password = "Your_WIFI_Password"
Connect the ESP32-CAM board to your computer using an FTDI programmer. Follow the next schematic diagram:
Important: GPIO 0 needs to be connected to GND so that you’re able to upload code.
Press the ESP32-CAM on-board RST button before upload the code.
Run Arduino IDE and click Upload to build and flash the sketch to your device.
After uploading the code, disconnect GPIO 0 from GND.
Open the Serial Monitor at a baud rate of 115200. Press the ESP32-CAM on-board RST button.
The ESP32-CAM IP address should be shown in the Serial Monitor.
CONTROL A VIDEO SURVEILLANCE ROBOTDisconnect the ESP32-CAM from the FTDI programmer.
Connect the ESP32-CAM back to the Pan/Tilt platform, turn on power and press the ESP32-CAM on-board RST button.
Run the App on your iPhone, enter the ESP32-CAM IP address and play with the robot!
You should open up your router settings. (google how to do this for your router). There you will find some settings, including something along the lines of Forwarding or Port Forwarding.
The important thing to note here is the "Port Range" and the "Device" or "IP address".
In "Port Range" you should type 80-81.
For "Device" you should select your ESP32-CAM device. In some routers you should put the IP address of your ESP32-CAM instead of a device name.
Go to www.whatsmyip.org and copy your IP. Use this IP in the App when you are outside your home network.
/*
ESP32-CAM Remote Control
*/
const char* ssid = "Your_WIFI_Network";
const char* password = "Your password";
#include "esp_wifi.h"
#include "esp_camera.h"
#include <WiFi.h>
#include "soc/soc.h"
#include "soc/rtc_cntl_reg.h"
//
// WARNING!!! Make sure that you have either selected ESP32 Wrover Module,
// or another board which has PSRAM enabled
//
// Select camera model
//#define CAMERA_MODEL_WROVER_KIT
//#define CAMERA_MODEL_M5STACK_PSRAM
#define CAMERA_MODEL_AI_THINKER
#if defined(CAMERA_MODEL_WROVER_KIT)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 21
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 19
#define Y4_GPIO_NUM 18
#define Y3_GPIO_NUM 5
#define Y2_GPIO_NUM 4
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#elif defined(CAMERA_MODEL_M5STACK_PSRAM)
#define PWDN_GPIO_NUM -1
#define RESET_GPIO_NUM 15
#define XCLK_GPIO_NUM 27
#define SIOD_GPIO_NUM 25
#define SIOC_GPIO_NUM 23
#define Y9_GPIO_NUM 19
#define Y8_GPIO_NUM 36
#define Y7_GPIO_NUM 18
#define Y6_GPIO_NUM 39
#define Y5_GPIO_NUM 5
#define Y4_GPIO_NUM 34
#define Y3_GPIO_NUM 35
#define Y2_GPIO_NUM 32
#define VSYNC_GPIO_NUM 22
#define HREF_GPIO_NUM 26
#define PCLK_GPIO_NUM 21
#elif defined(CAMERA_MODEL_AI_THINKER)
#define PWDN_GPIO_NUM 32
#define RESET_GPIO_NUM -1
#define XCLK_GPIO_NUM 0
#define SIOD_GPIO_NUM 26
#define SIOC_GPIO_NUM 27
#define Y9_GPIO_NUM 35
#define Y8_GPIO_NUM 34
#define Y7_GPIO_NUM 39
#define Y6_GPIO_NUM 36
#define Y5_GPIO_NUM 21
#define Y4_GPIO_NUM 19
#define Y3_GPIO_NUM 18
#define Y2_GPIO_NUM 5
#define VSYNC_GPIO_NUM 25
#define HREF_GPIO_NUM 23
#define PCLK_GPIO_NUM 22
#else
#error "Camera model not selected"
#endif
void startCameraServer();
const int MotPin0 = 12;
const int MotPin1 = 13;
const int MotPin2 = 14;
const int MotPin3 = 15;
void initMotors()
{
ledcSetup(3, 2000, 8); // 2000 hz PWM, 8-bit resolution
ledcSetup(4, 2000, 8); // 2000 hz PWM, 8-bit resolution
ledcSetup(5, 2000, 8); // 2000 hz PWM, 8-bit resolution
ledcSetup(6, 2000, 8); // 2000 hz PWM, 8-bit resolution
ledcAttachPin(MotPin0, 3);
ledcAttachPin(MotPin1, 4);
ledcAttachPin(MotPin2, 5);
ledcAttachPin(MotPin3, 6);
}
const int ServoPin = 2;
void initServo()
{
ledcSetup(8, 50, 16); // 50 hz PWM, 16-bit resolution, range from 3250 to 6500.
ledcAttachPin(ServoPin, 8);
}
void setup()
{
WRITE_PERI_REG(RTC_CNTL_BROWN_OUT_REG, 0); // prevent brownouts by silencing them
Serial.begin(115200);
Serial.setDebugOutput(true);
Serial.println();
camera_config_t config;
config.ledc_channel = LEDC_CHANNEL_0;
config.ledc_timer = LEDC_TIMER_0;
config.pin_d0 = Y2_GPIO_NUM;
config.pin_d1 = Y3_GPIO_NUM;
config.pin_d2 = Y4_GPIO_NUM;
config.pin_d3 = Y5_GPIO_NUM;
config.pin_d4 = Y6_GPIO_NUM;
config.pin_d5 = Y7_GPIO_NUM;
config.pin_d6 = Y8_GPIO_NUM;
config.pin_d7 = Y9_GPIO_NUM;
config.pin_xclk = XCLK_GPIO_NUM;
config.pin_pclk = PCLK_GPIO_NUM;
config.pin_vsync = VSYNC_GPIO_NUM;
config.pin_href = HREF_GPIO_NUM;
config.pin_sscb_sda = SIOD_GPIO_NUM;
config.pin_sscb_scl = SIOC_GPIO_NUM;
config.pin_pwdn = PWDN_GPIO_NUM;
config.pin_reset = RESET_GPIO_NUM;
config.xclk_freq_hz = 20000000;
config.pixel_format = PIXFORMAT_JPEG;
//init with high specs to pre-allocate larger buffers
if(psramFound()){
config.frame_size = FRAMESIZE_QVGA;
config.jpeg_quality = 10;
config.fb_count = 2;
} else {
config.frame_size = FRAMESIZE_QVGA;
config.jpeg_quality = 12;
config.fb_count = 1;
}
// camera init
esp_err_t err = esp_camera_init(&config);
if (err != ESP_OK) {
Serial.printf("Camera init failed with error 0x%x", err);
return;
}
//drop down frame size for higher initial frame rate
sensor_t * s = esp_camera_sensor_get();
s->set_framesize(s, FRAMESIZE_QVGA);
s->set_vflip(s, 1);
s->set_hmirror(s, 1);
// Remote Control Car
initMotors();
initServo();
ledcSetup(7, 5000, 8);
ledcAttachPin(4, 7); //pin4 is LED
Serial.println("ssid: " + (String)ssid);
Serial.println("password: " + (String)password);
WiFi.begin(ssid, password);
delay(500);
long int StartTime=millis();
while (WiFi.status() != WL_CONNECTED)
{
delay(500);
if ((StartTime+10000) < millis()) break;
}
/*
int8_t power;
esp_wifi_set_max_tx_power(20);
esp_wifi_get_max_tx_power(&power);
Serial.printf("wifi power: %d \n",power);
*/
startCameraServer();
if (WiFi.status() == WL_CONNECTED)
{
Serial.println("");
Serial.println("WiFi connected");
Serial.print("Camera Ready! Use 'http://");
Serial.print(WiFi.localIP());
Serial.println("' to connect");
} else {
Serial.println("");
Serial.println("WiFi disconnected");
Serial.print("Camera Ready! Use 'http://");
Serial.print(WiFi.softAPIP());
Serial.println("' to connect");
char* apssid = "ESP32-CAM";
char* appassword = "12345678"; //AP password require at least 8 characters.
WiFi.softAP((WiFi.softAPIP().toString()+"_"+(String)apssid).c_str(), appassword);
}
for (int i=0;i<5;i++)
{
ledcWrite(7,10); // flash led
delay(200);
ledcWrite(7,0);
delay(200);
}
}
void loop() {
// put your main code here, to run repeatedly:
delay(1000);
//Serial.printf("RSSi: %ld dBm\n",WiFi.RSSI());
}
//SECOND PART OF THE CODE. PUT IT TO ANOTHER TAB "app_httpd.cpp"
//or download entire code from https://www.robbie-app.com/esp32cam_car.zip
#include <esp32-hal-ledc.h>
int cspeed = 200;
int noStop = 1;
int xcoord = 0;
float speed_Coeff = (1 + (xcoord/50.0));
#include "esp_http_server.h"
#include "esp_timer.h"
#include "esp_camera.h"
#include "img_converters.h"
#include "Arduino.h"
//#include <dl_lib.h>
typedef struct {
httpd_req_t *req;
size_t len;
} jpg_chunking_t;
#define PART_BOUNDARY "123456789000000000000987654321"
static const char* _STREAM_CONTENT_TYPE = "multipart/x-mixed-replace;boundary=" PART_BOUNDARY;
static const char* _STREAM_BOUNDARY = "\r\n--" PART_BOUNDARY "\r\n";
static const char* _STREAM_PART = "Content-Type: image/jpeg\r\nContent-Length: %u\r\n\r\n";
httpd_handle_t stream_httpd = NULL;
httpd_handle_t camera_httpd = NULL;
static size_t jpg_encode_stream(void * arg, size_t index, const void* data, size_t len){
jpg_chunking_t *j = (jpg_chunking_t *)arg;
if(!index){
j->len = 0;
}
if(httpd_resp_send_chunk(j->req, (const char *)data, len) != ESP_OK){
return 0;
}
j->len += len;
return len;
}
static esp_err_t capture_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
int64_t fr_start = esp_timer_get_time();
fb = esp_camera_fb_get();
if (!fb) {
Serial.println("Camera capture failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
httpd_resp_set_type(req, "image/jpeg");
httpd_resp_set_hdr(req, "Content-Disposition", "inline; filename=capture.jpg");
size_t out_len, out_width, out_height;
uint8_t * out_buf;
bool s;
{
size_t fb_len = 0;
if(fb->format == PIXFORMAT_JPEG){
fb_len = fb->len;
res = httpd_resp_send(req, (const char *)fb->buf, fb->len);
} else {
jpg_chunking_t jchunk = {req, 0};
res = frame2jpg_cb(fb, 80, jpg_encode_stream, &jchunk)?ESP_OK:ESP_FAIL;
httpd_resp_send_chunk(req, NULL, 0);
fb_len = jchunk.len;
}
esp_camera_fb_return(fb);
int64_t fr_end = esp_timer_get_time();
Serial.printf("JPG: %uB %ums\n", (uint32_t)(fb_len), (uint32_t)((fr_end - fr_start)/1000));
return res;
}
// dl_matrix3du_t *image_matrix = dl_matrix3du_alloc(1, fb->width, fb->height, 3);
// if (!image_matrix) {
esp_camera_fb_return(fb);
Serial.println("dl_matrix3du_alloc failed");
httpd_resp_send_500(req);
return ESP_FAIL;
}
// out_buf = image_matrix->item;
// out_len = fb->width * fb->height * 3;
// out_width = fb->width;
// out_height = fb->height;
// s = fmt2rgb888(fb->buf, fb->len, fb->format, out_buf);
// esp_camera_fb_return(fb);
// if(!s){
// dl_matrix3du_free(image_matrix);
// Serial.println("to rgb888 failed");
// httpd_resp_send_500(req);
// return ESP_FAIL;
// }
// jpg_chunking_t jchunk = {req, 0};
// s = fmt2jpg_cb(out_buf, out_len, out_width, out_height, PIXFORMAT_RGB888, 90, jpg_encode_stream, &jchunk);
// dl_matrix3du_free(image_matrix);
// if(!s){
// Serial.println("JPEG compression failed");
// return ESP_FAIL;
// }
// int64_t fr_end = esp_timer_get_time();
// return res;
//}
static esp_err_t stream_handler(httpd_req_t *req){
camera_fb_t * fb = NULL;
esp_err_t res = ESP_OK;
size_t _jpg_buf_len = 0;
uint8_t * _jpg_buf = NULL;
char * part_buf[64];
// dl_matrix3du_t *image_matrix = NULL;
static int64_t last_frame = 0;
if(!last_frame) {
last_frame = esp_timer_get_time();
}
res = httpd_resp_set_type(req, _STREAM_CONTENT_TYPE);
if(res != ESP_OK){
return res;
}
while(true){
fb = esp_camera_fb_get();
if (!fb) {
Serial.println("Camera capture failed");
res = ESP_FAIL;
} else {
{
if(fb->format != PIXFORMAT_JPEG){
bool jpeg_converted = frame2jpg(fb, 80, &_jpg_buf, &_jpg_buf_len);
esp_camera_fb_return(fb);
fb = NULL;
if(!jpeg_converted){
Serial.println("JPEG compression failed");
res = ESP_FAIL;
}
} else {
_jpg_buf_len = fb->len;
_jpg_buf = fb->buf;
}
}
}
if(res == ESP_OK){
size_t hlen = snprintf((char *)part_buf, 64, _STREAM_PART, _jpg_buf_len);
res = httpd_resp_send_chunk(req, (const char *)part_buf, hlen);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, (const char *)_jpg_buf, _jpg_buf_len);
}
if(res == ESP_OK){
res = httpd_resp_send_chunk(req, _STREAM_BOUNDARY, strlen(_STREAM_BOUNDARY));
}
if(fb){
esp_camera_fb_return(fb);
fb = NULL;
_jpg_buf = NULL;
} else if(_jpg_buf){
free(_jpg_buf);
_jpg_buf = NULL;
}
if(res != ESP_OK){
break;
}
int64_t fr_end = esp_timer_get_time();
int64_t frame_time = fr_end - last_frame;
last_frame = fr_end;
frame_time /= 1000;
Serial.printf("MJPG: %uB %ums (%.1ffps)\n",
(uint32_t)(_jpg_buf_len),
(uint32_t)frame_time, 1000.0 / (uint32_t)frame_time
);
}
last_frame = 0;
return res;
}
enum state {fwd,rev,stp};
state actstate = stp;
static esp_err_t cmd_handler(httpd_req_t *req)
{
char* buf;
size_t buf_len;
char variable[32] = {0,};
char value[32] = {0,};
buf_len = httpd_req_get_url_query_len(req) + 1;
if (buf_len > 1) {
buf = (char*)malloc(buf_len);
if(!buf){
httpd_resp_send_500(req);
return ESP_FAIL;
}
if (httpd_req_get_url_query_str(req, buf, buf_len) == ESP_OK) {
if (httpd_query_key_value(buf, "var", variable, sizeof(variable)) == ESP_OK &&
httpd_query_key_value(buf, "val", value, sizeof(value)) == ESP_OK) {
} else {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
} else {
free(buf);
httpd_resp_send_404(req);
return ESP_FAIL;
}
free(buf);
} else {
httpd_resp_send_404(req);
return ESP_FAIL;
}
int val = atoi(value);
sensor_t * s = esp_camera_sensor_get();
int res = 0;
if(!strcmp(variable, "framesize"))
{
Serial.println("framesize");
if(s->pixformat == PIXFORMAT_JPEG) res = s->set_framesize(s, (framesize_t)val);
}
else if(!strcmp(variable, "quality"))
{
Serial.println("quality");
res = s->set_quality(s, val);
}
//Remote Control Car
//Don't use channel 1 and channel 2
else if(!strcmp(variable, "flash"))
{
ledcWrite(7,val);
}
else if(!strcmp(variable, "speeds"))
{
if (val > 255) val = 255;
else if (val < 0) val = 0;
cspeed = val*2;
}
else if(!strcmp(variable, "xcoord"))
{
if (val > 255) val = 255;
// else if (val < 0) val = 0;
xcoord = val;
speed_Coeff = (1 + (xcoord/50.0));
}
else if(!strcmp(variable, "nostop"))
{
noStop = val;
}
else if(!strcmp(variable, "servo")) // 3250, 4875, 6500
{
if (val > 650) val = 650;
else if (val < 326) val = 225;
ledcWrite(8,10*val);
}
else if(!strcmp(variable, "car")) {
if(val == 1){
actstate = fwd;
ledcWrite(4,cspeed); // pin 12
ledcWrite(3,0); // pin 13
ledcWrite(5,cspeed); // pin 14
ledcWrite(6,0); // pin 15
delay(25);
}
if(val == 0){
actstate = stp;
ledcWrite(4,0);
ledcWrite(3,0);
ledcWrite(5,0);
ledcWrite(6,0);
}
if(val == 2){
actstate = rev;
ledcWrite(4,0);
ledcWrite(3,cspeed);
ledcWrite(5,0);
ledcWrite(6,cspeed);
delay(25);
}
if(val == 3){
ledcWrite(3,0);
ledcWrite(6,0);
ledcWrite(5,cspeed+30);
ledcWrite(4, cspeed/speed_Coeff);
delay(25);
}
if(val == 4){
ledcWrite(3,0);
ledcWrite(6,0);
ledcWrite(5, cspeed/speed_Coeff);
ledcWrite(4,cspeed+30);
delay(25);
}
if(val == 5){
ledcWrite(6,0); ledcWrite(3,0); ledcWrite(5,130);
delay(25);
}
if(val == 6){
ledcWrite(5,0); ledcWrite(4,130); ledcWrite(6,0);
delay(25);
}
if(val == 7){
ledcWrite(4,0);
ledcWrite(5,0);
ledcWrite(6, cspeed/speed_Coeff);
ledcWrite(3,cspeed+30);
delay(25);
}
if(val == 8){
ledcWrite(4,0);
ledcWrite(5,0);
ledcWrite(6,cspeed+50);
ledcWrite(3, cspeed/speed_Coeff);
delay(25);
}
if (noStop!=1)
{
ledcWrite(3, 0);
ledcWrite(4, 0);
ledcWrite(5, 0);
ledcWrite(6, 0);
}
}
else
{
Serial.println("variable");
res = -1;
}
if(res){ return httpd_resp_send_500(req); }
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, NULL, 0);
}
static esp_err_t status_handler(httpd_req_t *req){
static char json_response[1024];
sensor_t * s = esp_camera_sensor_get();
char * p = json_response;
*p++ = '{';
p+=sprintf(p, "\"framesize\":%u,", s->status.framesize);
p+=sprintf(p, "\"quality\":%u,", s->status.quality);
*p++ = '}';
*p++ = 0;
httpd_resp_set_type(req, "application/json");
httpd_resp_set_hdr(req, "Access-Control-Allow-Origin", "*");
return httpd_resp_send(req, json_response, strlen(json_response));
}
static const char PROGMEM INDEX_HTML[] = R"rawliteral(
<!doctype html>
<html>
<head>
<meta charset="utf-8">
<meta name="viewport" content="width=device-width,initial-scale=1">
<title>ESP32 OV2460</title>
<style>
body{font-family:Arial,Helvetica,sans-serif;background:#181818;color:#EFEFEF;font-size:16px}h2{font-size:18px}section.main{display:flex}#menu,section.main{flex-direction:column}#menu{display:none;flex-wrap:nowrap;min-width:340px;background:#363636;padding:8px;border-radius:4px;margin-top:-10px;margin-right:10px}#content{display:flex;flex-wrap:wrap;align-items:stretch}figure{padding:0;margin:0;-webkit-margin-before:0;margin-block-start:0;-webkit-margin-after:0;margin-block-end:0;-webkit-margin-start:0;margin-inline-start:0;-webkit-margin-end:0;margin-inline-end:0}figure img{display:block;width:100%;height:auto;border-radius:4px;margin-top:8px}@media (min-width: 800px) and (orientation:landscape){#content{display:flex;flex-wrap:nowrap;align-items:stretch}figure img{display:block;max-width:100%;max-height:calc(100vh - 40px);width:auto;height:auto}figure{padding:0;margin:0;-webkit-margin-before:0;margin-block-start:0;-webkit-margin-after:0;margin-block-end:0;-webkit-margin-start:0;margin-inline-start:0;-webkit-margin-end:0;margin-inline-end:0}}section#buttons{display:flex;flex-wrap:nowrap;justify-content:space-between}#nav-toggle{cursor:pointer;display:block}#nav-toggle-cb{outline:0;opacity:0;width:0;height:0}#nav-toggle-cb:checked+#menu{display:flex}.input-group{display:flex;flex-wrap:nowrap;line-height:22px;margin:5px 0}.input-group>label{display:inline-block;padding-right:10px;min-width:47%}.input-group input,.input-group select{flex-grow:1}.range-max,.range-min{display:inline-block;padding:0 5px}button{display:block;margin:5px;padding:0 12px;border:0;line-height:28px;cursor:pointer;color:#fff;background:#ff3034;border-radius:5px;font-size:16px;outline:0}button:hover{background:#ff494d}button:active{background:#f21c21}button.disabled{cursor:default;background:#a0a0a0}input[type=range]{-webkit-appearance:none;width:100%;height:22px;background:#363636;cursor:pointer;margin:0}input[type=range]:focus{outline:0}input[type=range]::-webkit-slider-runnable-track{width:100%;height:2px;cursor:pointer;background:#EFEFEF;border-radius:0;border:0 solid #EFEFEF}input[type=range]::-webkit-slider-thumb{border:1px solid rgba(0,0,30,0);height:22px;width:22px;border-radius:50px;background:#ff3034;cursor:pointer;-webkit-appearance:none;margin-top:-11.5px}input[type=range]:focus::-webkit-slider-runnable-track{background:#EFEFEF}input[type=range]::-moz-range-track{width:100%;height:2px;cursor:pointer;background:#EFEFEF;border-radius:0;border:0 solid #EFEFEF}input[type=range]::-moz-range-thumb{border:1px solid rgba(0,0,30,0);height:22px;width:22px;border-radius:50px;background:#ff3034;cursor:pointer}input[type=range]::-ms-track{width:100%;height:2px;cursor:pointer;background:0 0;border-color:transparent;color:transparent}input[type=range]::-ms-fill-lower{background:#EFEFEF;border:0 solid #EFEFEF;border-radius:0}input[type=range]::-ms-fill-upper{background:#EFEFEF;border:0 solid #EFEFEF;border-radius:0}input[type=range]::-ms-thumb{border:1px solid rgba(0,0,30,0);height:22px;width:22px;border-radius:50px;background:#ff3034;cursor:pointer;height:2px}input[type=range]:focus::-ms-fill-lower{background:#EFEFEF}input[type=range]:focus::-ms-fill-upper{background:#363636}.switch{display:block;position:relative;line-height:22px;font-size:16px;height:22px}.switch input{outline:0;opacity:0;width:0;height:0}.slider{width:50px;height:22px;border-radius:22px;cursor:pointer;background-color:grey}.slider,.slider:before{display:inline-block;transition:.4s}.slider:before{position:relative;content:"";border-radius:50%;height:16px;width:16px;left:4px;top:3px;background-color:#fff}input:checked+.slider{background-color:#ff3034}input:checked+.slider:before{-webkit-transform:translateX(26px);transform:translateX(26px)}select{border:1px solid #363636;font-size:14px;height:22px;outline:0;border-radius:5px}.image-container{position:relative;min-width:160px}.close{position:absolute;right:5px;top:5px;background:#ff3034;width:16px;height:16px;border-radius:100px;color:#fff;text-align:center;line-height:18px;cursor:pointer}.hidden{display:none}
</style>
</head>
<body>
<figure>
<div id="stream-container" class="image-container hidden">
<div class="close" id="close-stream">×</div>
<img id="stream" src="">
</div>
</figure>
<section class="main">
<section id="buttons">
<table>
<tr><td align="center"><button id="get-still">Get Still</button></td><td><td>                </td><td align="center"><button id="toggle-stream">Start Stream</button></td></tr>
<tr><td></td><td align="center">                <td></td><td></td></tr>
<tr><td align="center">                </td><td align="center">                <td></td><td align="center">                </td></tr>
<tr><td></td><td align="center" colspan="2"></br></tr>
<tr><td></td><td align="center" colspan="2"></br></tr>
<tr><td></td><td align="center" colspan="2"></br></tr>
<tr><td>Servo</td><td align="center" colspan="2"><input type="range" id="servo" min="325" max="650" value="487" onchange="try{fetch(document.location.origin+'/control?var=servo&val='+this.value);}catch(e){}"><td></td></tr>
<tr><td>Flash</td><td align="center" colspan="2"><input type="range" id="flash" min="0" max="255" value="0" onchange="try{fetch(document.location.origin+'/control?var=flash&val='+this.value);}catch(e){}"><td></td></tr>
<tr><td>Resolution</td><td align="center" colspan="2"><input type="range" id="framesize" min="0" max="6" value="5" onchange="try{fetch(document.location.origin+'/control?var=framesize&val='+this.value);}catch(e){}"><td></td></tr>
<tr><td>Quality</td><td align="center" colspan="2"><input type="range" id="quality" min="10" max="63" value="10" onchange="try{fetch(document.location.origin+'/control?var=quality&val='+this.value);}catch(e){}"><td></td></tr>
</table>
</section>
</section>
<script>
document.addEventListener('DOMContentLoaded',function(){function b(B){let C;switch(B.type){case'checkbox':C=B.checked?1:0;break;case'range':case'select-one':C=B.value;break;case'button':case'submit':C='1';break;default:return;}const D=`${c}/control?var=${B.id}&val=${C}`;fetch(D).then(E=>{console.log(`request to ${D} finished, status: ${E.status}`)})}var c=document.location.origin;const e=B=>{B.classList.add('hidden')},f=B=>{B.classList.remove('hidden')},g=B=>{B.classList.add('disabled'),B.disabled=!0},h=B=>{B.classList.remove('disabled'),B.disabled=!1},i=(B,C,D)=>{D=!(null!=D)||D;let E;'checkbox'===B.type?(E=B.checked,C=!!C,B.checked=C):(E=B.value,B.value=C),D&&E!==C?b(B):!D&&('aec'===B.id?C?e(v):f(v):'agc'===B.id?C?(f(t),e(s)):(e(t),f(s)):'awb_gain'===B.id?C?f(x):e(x):'face_recognize'===B.id&&(C?h(n):g(n)))};document.querySelectorAll('.close').forEach(B=>{B.onclick=()=>{e(B.parentNode)}}),fetch(`${c}/status`).then(function(B){return B.json()}).then(function(B){document.querySelectorAll('.default-action').forEach(C=>{i(C,B[C.id],!1)})});const j=document.getElementById('stream'),k=document.getElementById('stream-container'),l=document.getElementById('get-still'),m=document.getElementById('toggle-stream'),n=document.getElementById('face_enroll'),o=document.getElementById('close-stream'),p=()=>{window.stop(),m.innerHTML='Start Stream'},q=()=>{j.src=`${c+':81'}/stream`,f(k),m.innerHTML='Stop Stream'};l.onclick=()=>{p(),j.src=`${c}/capture?_cb=${Date.now()}`,f(k)},o.onclick=()=>{p(),e(k)},m.onclick=()=>{const B='Stop Stream'===m.innerHTML;B?p():q()},n.onclick=()=>{b(n)},document.querySelectorAll('.default-action').forEach(B=>{B.onchange=()=>b(B)});const r=document.getElementById('agc'),s=document.getElementById('agc_gain-group'),t=document.getElementById('gainceiling-group');r.onchange=()=>{b(r),r.checked?(f(t),e(s)):(e(t),f(s))};const u=document.getElementById('aec'),v=document.getElementById('aec_value-group');u.onchange=()=>{b(u),u.checked?e(v):f(v)};const w=document.getElementById('awb_gain'),x=document.getElementById('wb_mode-group');w.onchange=()=>{b(w),w.checked?f(x):e(x)};const y=document.getElementById('face_detect'),z=document.getElementById('face_recognize'),A=document.getElementById('framesize');A.onchange=()=>{b(A),5<A.value&&(i(y,!1),i(z,!1))},y.onchange=()=>{return 5<A.value?(alert('Please select CIF or lower resolution before enabling this feature!'),void i(y,!1)):void(b(y),!y.checked&&(g(n),i(z,!1)))},z.onchange=()=>{return 5<A.value?(alert('Please select CIF or lower resolution before enabling this feature!'),void i(z,!1)):void(b(z),z.checked?(h(n),i(y,!0)):g(n))}});
</script>
</body>
</html>
)rawliteral";
static esp_err_t index_handler(httpd_req_t *req){
httpd_resp_set_type(req, "text/html");
return httpd_resp_send(req, (const char *)INDEX_HTML, strlen(INDEX_HTML));
}
void startCameraServer()
{
httpd_config_t config = HTTPD_DEFAULT_CONFIG();
httpd_uri_t index_uri = {
.uri = "/",
.method = HTTP_GET,
.handler = index_handler,
.user_ctx = NULL
};
httpd_uri_t status_uri = {
.uri = "/status",
.method = HTTP_GET,
.handler = status_handler,
.user_ctx = NULL
};
httpd_uri_t cmd_uri = {
.uri = "/control",
.method = HTTP_GET,
.handler = cmd_handler,
.user_ctx = NULL
};
httpd_uri_t capture_uri = {
.uri = "/capture",
.method = HTTP_GET,
.handler = capture_handler,
.user_ctx = NULL
};
httpd_uri_t stream_uri = {
.uri = "/stream",
.method = HTTP_GET,
.handler = stream_handler,
.user_ctx = NULL
};
Serial.printf("Starting web server on port: '%d'\n", config.server_port);
if (httpd_start(&camera_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(camera_httpd, &index_uri);
httpd_register_uri_handler(camera_httpd, &cmd_uri);
httpd_register_uri_handler(camera_httpd, &status_uri);
httpd_register_uri_handler(camera_httpd, &capture_uri);
}
config.server_port += 1;
config.ctrl_port += 1;
Serial.printf("Starting stream server on port: '%d'\n", config.server_port);
if (httpd_start(&stream_httpd, &config) == ESP_OK) {
httpd_register_uri_handler(stream_httpd, &stream_uri);
}
}







{kind=link}
Comments