[InternetShortcut]
URL=https:
//create.arduino.cc/projecthub/projects/582f8b/edit
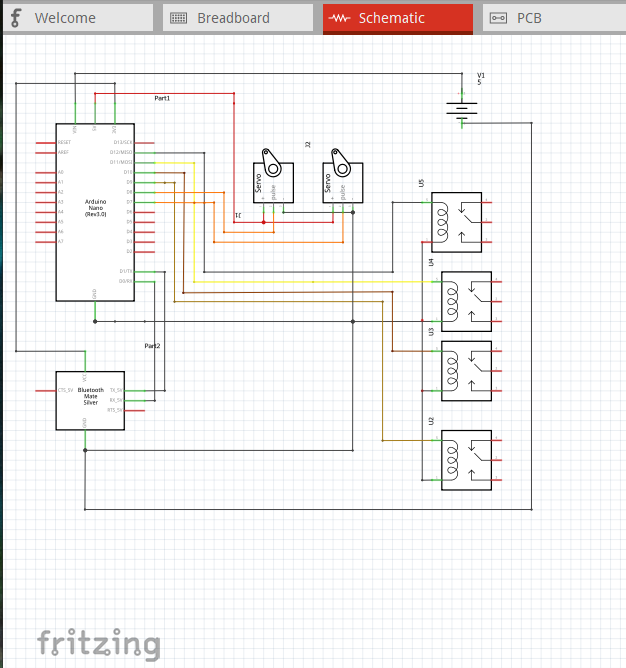
/* Control led desde el pin 12, 11, 10 y 4
usando aplicacion de bluetooth serial
y ligthblue con iphone y el modulo
SH-M08 CC2541
*/
#include <Arduino.h>
#include <Servo.h>
Servo servo1; // Crea el servo con la libreria de servo.h
Servo servo2; // Creat a servo whit librery servo.h
int leds[] = {12, 11, 10, 9};
//char val;
int val=0;
void setup() {
servo1.attach(8);
servo2.attach(7);
pinMode (9, OUTPUT);
pinMode (12, OUTPUT);
pinMode (11, OUTPUT);
pinMode (10, OUTPUT);
Serial.begin(9600);
delay(500);
}
void loop() { // put your main code here, to run repeatedly:
if (Serial.available()>0) {
val = Serial.read();
}
if (val == 'q') { // tell a reley to go ON
digitalWrite(12, HIGH);
}
if (val == 'w') { // tell a relay to go OFF
digitalWrite(12, LOW);
}
if (val == 'e') {
digitalWrite(11, HIGH);
}
if (val == 'r') {
digitalWrite(11, LOW);
}
if (val == 't') {
digitalWrite(10, HIGH);
}
if (val == 'y') {
digitalWrite(10, LOW);
}
if (val == 'o') {
digitalWrite(9, HIGH);
}
if (val == 'p') {
digitalWrite(9, LOW);
}
if (val == 'd') {
servo1.write(0); // tell servo to go to position in variable 'pos'
}
if (val == 'f') {
servo1.write(180); // tell servo to go to position in variable 'pos'
}
if (val == 'a') {
servo2.write(0); // tell servo to go to position in variable 'pos'
}
if (val == 's') {
servo2.write(180); // tell servo to go to position in variable 'pos'
}
if (val == 'n') { // All ligth torn ON
digitalWrite(9, HIGH);
digitalWrite(10, HIGH);
digitalWrite(11, HIGH);
digitalWrite(12, HIGH);
}
if (val == 'm') { // All ligth torn OFF
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
digitalWrite(12, LOW);
}
}













{kind=link}
Comments