
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
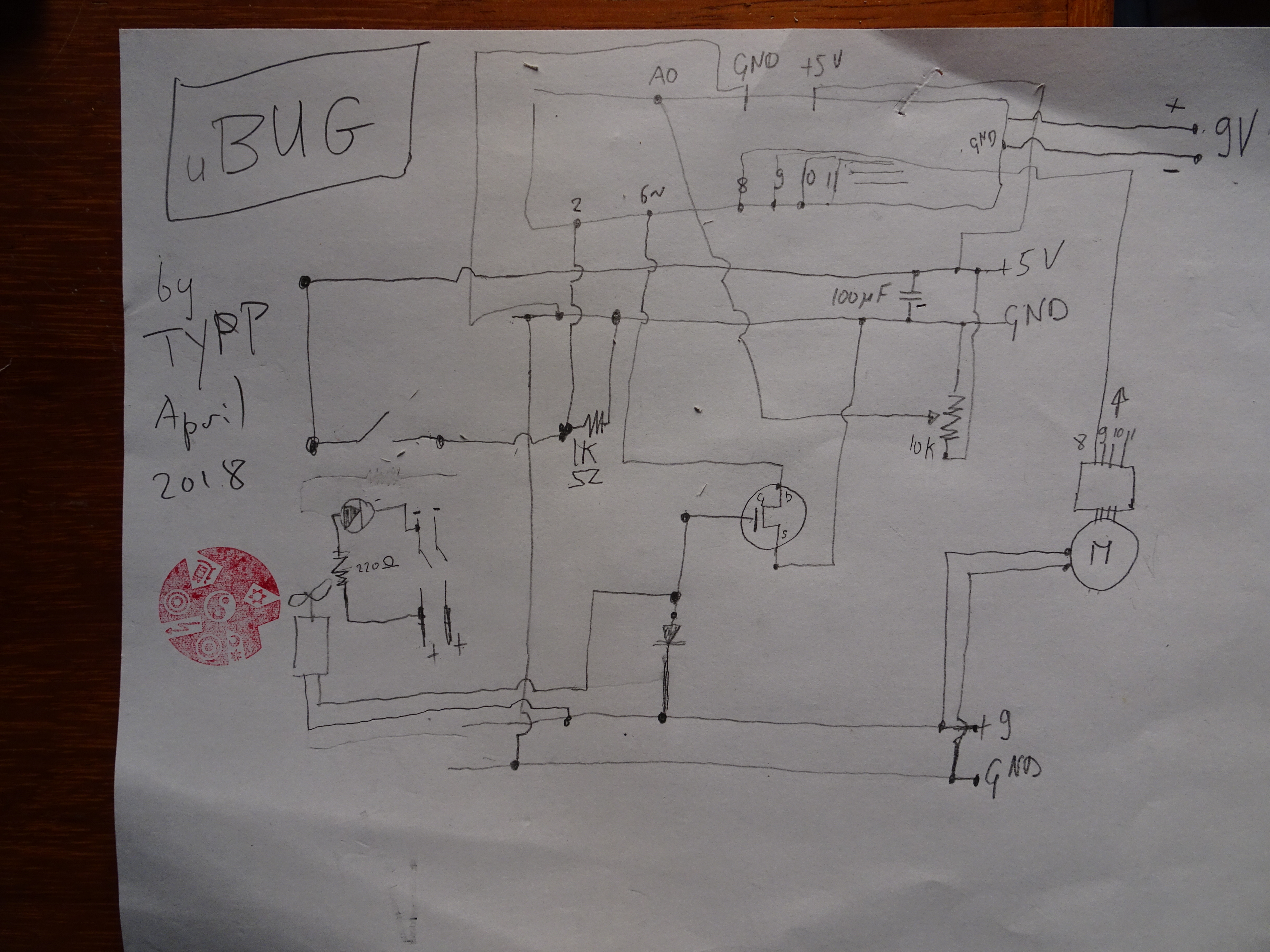
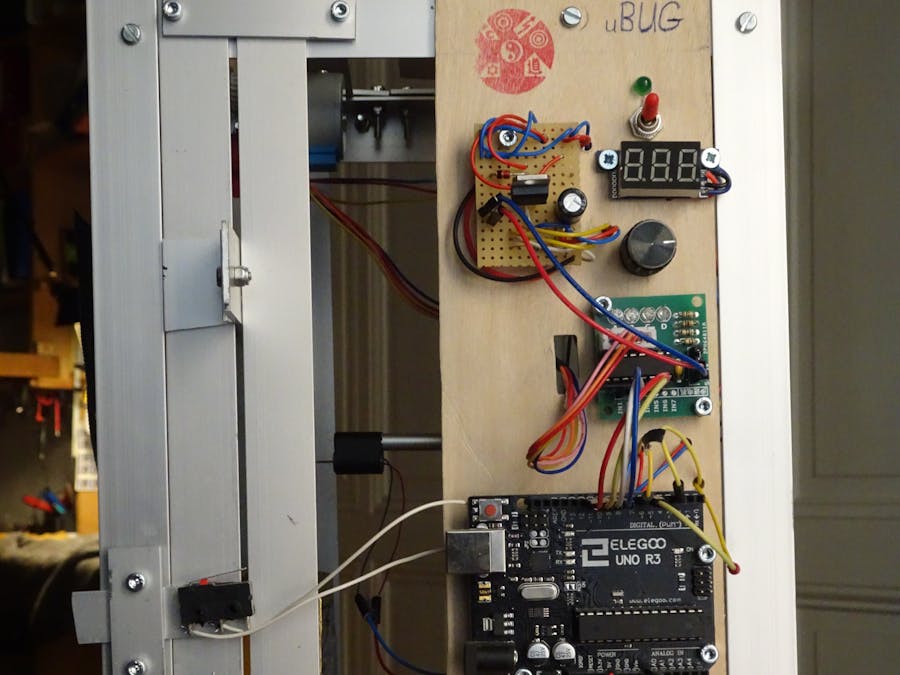
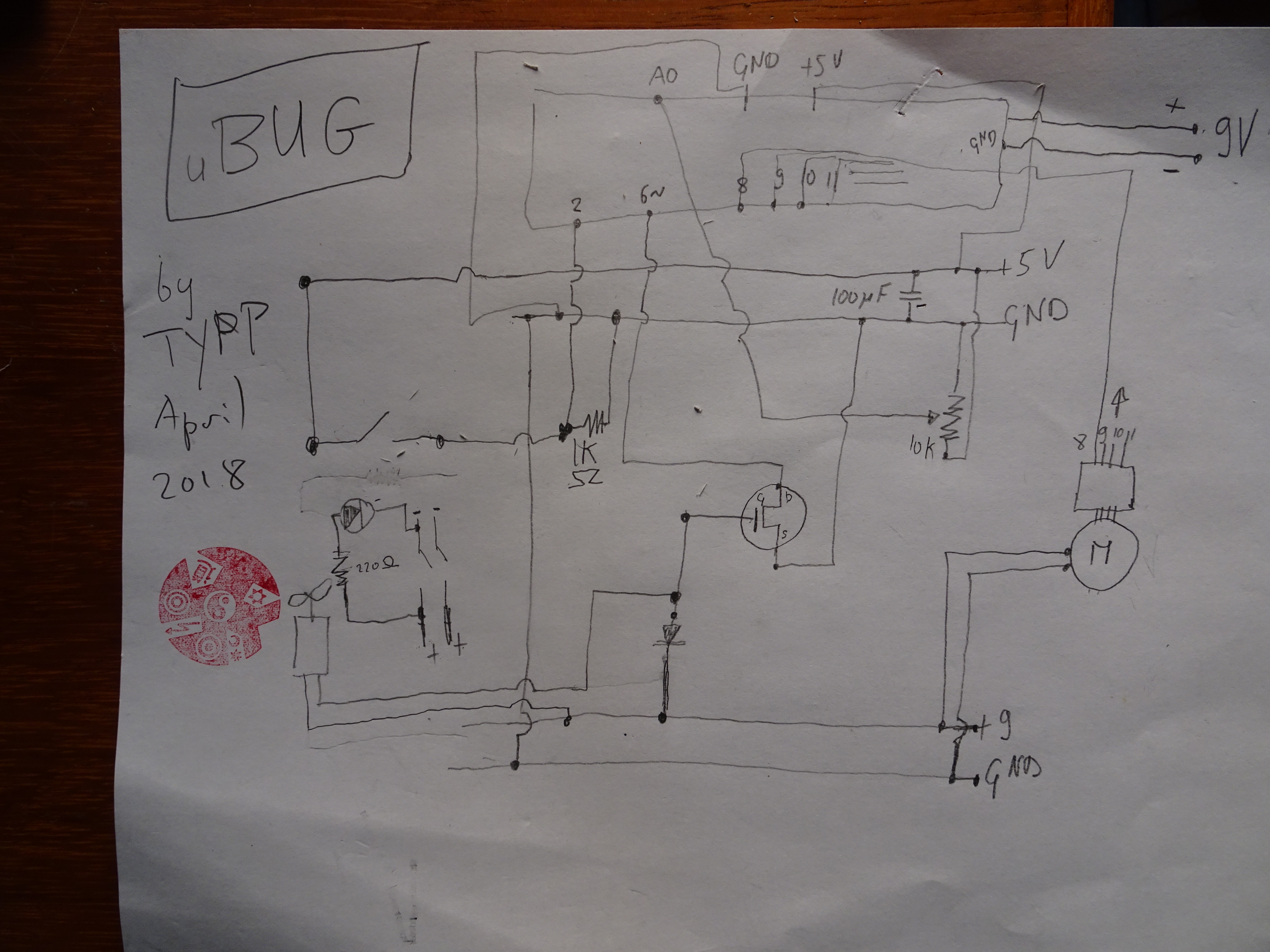
// uBUG Bubble Unik Guillotine
// Helix Fan : Inverted polarities since a drone helix is not a fan !
#include <Stepper.h>
#include <Servo.h>// Grid gate operation
#define STEPS_PER_MOTOR_REVOLUTION 32 // Number of steps per revolution of INTERNAL motor in 4-step mode
#define RevShaft 32 * 64 //2048, steps NB per 1 revolution of OUTPUT SHAFT (= gear reduction; 2048 steps)
Stepper small_stepper(STEPS_PER_MOTOR_REVOLUTION, 8, 10, 9, 11);// Declare 'small_stepper' variable pins
Servo GridServo; // create a servo object
//Parameters ===================================================
const float topLevelHatchet = 2.0; // : this defines Hatchet elevation level around 2.0
int HelixOnMilliSec = 900;
int MaxMapMtr = 255; //controls Helix speed range. NB MAX = 255
int OPENGrid = 185; // Grid Angle
int CLOSEGrid = 55; // Grid Angle
//Constants ====================================================
const int SwitchPin = 2; //lateral Switch
const int HelixPin = 6; //Helix blower
const int potPin = A0;// analog Potentiometer regulates Helix speed
const int DOWN = 1;
const int UP = -1;
//Variables ====================================================
int Steps2Take;
int SwitchState = 0;
//MAIN =========================================================
//MAIN =========================================================
void setup() {
Serial.begin(9600);
GridServo.attach(5); // PWM pin required
GridServo.write(CLOSEGrid);
// NB NB NB Stepper Library sets pins as outputs NB NB NB
pinMode(SwitchPin, INPUT);
pinMode(HelixPin, OUTPUT);
digitalWrite (HelixPin,LOW);
// To bring Hatchet to bottom reference level with lateral Switch
SwitchState = digitalRead(SwitchPin);
while (SwitchState == LOW){
Serial.print("SwitchState: ");
Serial.println(SwitchState);
Steps2Take = DOWN * RevShaft * 0.0454;
small_stepper.setSpeed(1000);
small_stepper.step(Steps2Take);
SwitchState = digitalRead(SwitchPin);
delay(2);
}//END while
delay(200);
// Small Up step to clear Switch lever : this defines Hatchet bottom level
Steps2Take = UP * RevShaft * 0.1;
small_stepper.setSpeed(1000);
small_stepper.step(Steps2Take);
delay(200);
Serial.print("SwitchState after WHILE: ");
Serial.println(SwitchState);
}//END setup
void loop() {
Serial.println("===============================");
// Hatchet emerge from reservoir
Steps2Take = UP * RevShaft * topLevelHatchet; //Up
small_stepper.setSpeed(1000);
small_stepper.step(Steps2Take);
// Grid OPEN
GridServo.write(OPENGrid);
delay(400);
// Helix blows Bubble
analogWrite(HelixPin,(fPotControl()));
delay(HelixOnMilliSec);
digitalWrite (HelixPin,LOW);
// Grid CLOSE
delay(200);
GridServo.write(CLOSEGrid);
// Hatchet dips into reservoir
Steps2Take = DOWN * RevShaft * topLevelHatchet; //Down
small_stepper.setSpeed(1000);
small_stepper.step(Steps2Take);
delay(500);
}// END loop
// SUBs &&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&&
int fPotControl(){ // Potentiometer regulates Helix speed
int potVal = analogRead(potPin);
int mtrVal = map(potVal,0, 1023, 0, MaxMapMtr); // motorVal
Serial.print (potVal);
Serial.print (" ; ");
Serial.println (mtrVal);
return mtrVal;
}//END sPotControl
Embed the widget on your own site
Add the following snippet to your HTML:

uBUG
uBUG: Bubble Unik Guillotine delves in sheer electro-magnetic POETRY (small u stand for useless!)




{kind=link}
Comments