


Hardware components | ||||||
| × | 3 | ||||
| × | 3 | ||||
| × | 3 | ||||
| × | 2 | ||||
| × | 2 | ||||
| × | 3 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
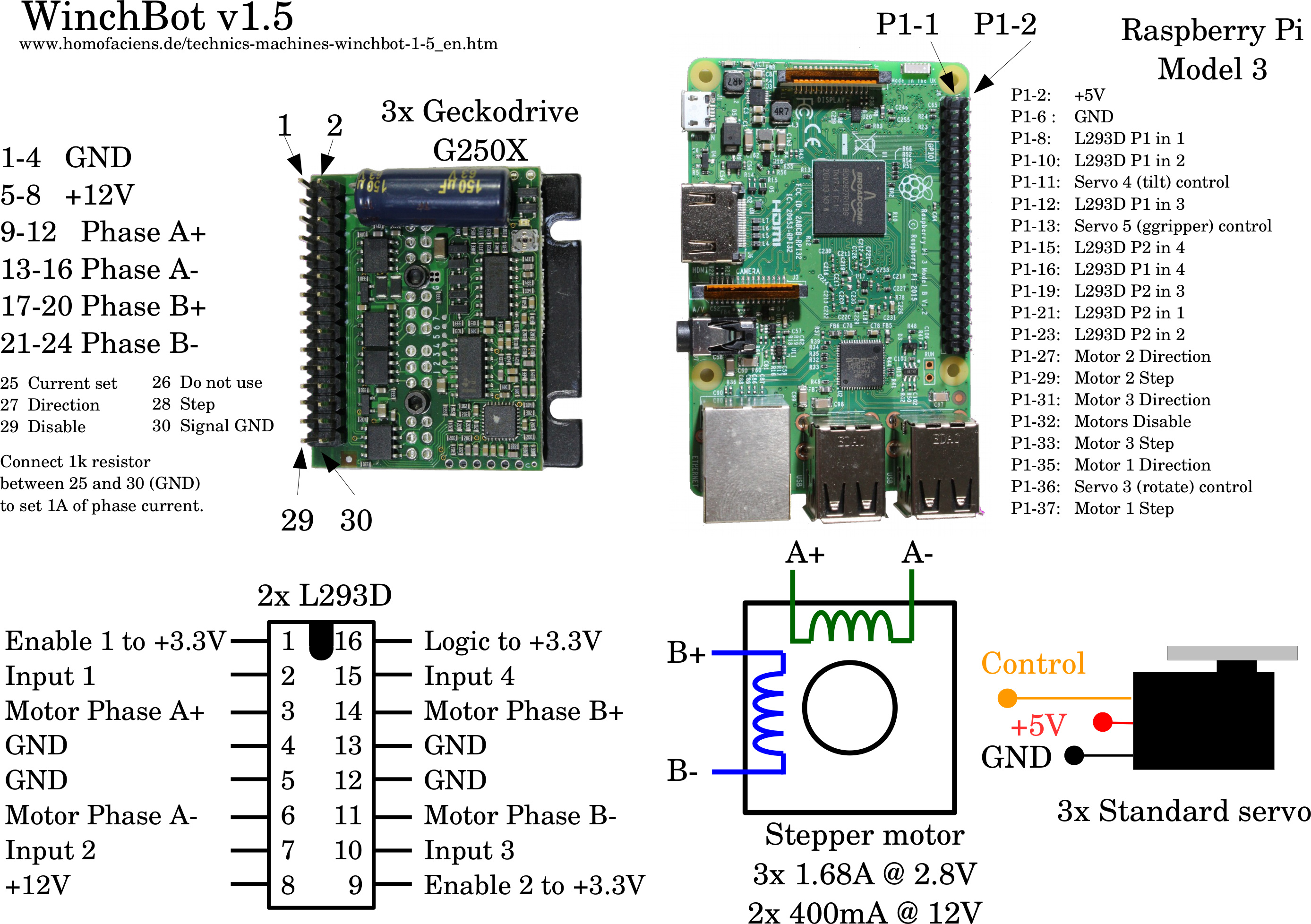
WinchBot is a robot arm hanging on the ceiling. To make it work you don't have to cut all parts with high precision. It will work even if the parts of the frame are cut with a tolerance of +-3mm. It's a nice machine to teach about the Pythagorean theorem and about transformation from cable length to XYZ coordinates.
The complete documentation is available on www.HomoFaciens.de
Software package WinchBot 1.5
C/C++WinchBot-1-5.c is the source code of the robot located in the subfolder www/WinchBot-1-5
The readme_en.txt gives the installation instruction starting with Raspbian lite.
The readme_en.txt gives the installation instruction starting with Raspbian lite.
//Project: WinchBot 1.5
//Homepage: www.HomoFaciens.de
//Author Norbert Heinz
//Version: 0.1
//Creation date: 04.12.2017
//
//compile with gcc WinchBot-1-5.c -o WinchBot-1-5 -I/usr/local/include -L/usr/local/lib -lwiringPi -lm -lpigpio -pthread -Wall
//For details see:
//https://www.homofaciens.de/technics-machines-winchbot-1-5_en.htm
#include <stdio.h>
#include <termios.h>
#include <sys/ioctl.h>
#include <stdlib.h>
#include <string.h>
#include <time.h>
#include <sys/time.h>
#include <dirent.h>
#include <math.h>
#include <wiringPi.h>
#include <unistd.h>
#include <pigpio.h>
#include <signal.h>
//Base length of triangle in mm
#define BASELENGTH 895.0
//Initial cord length in mm
#define INITIAL_LENGTH 600.0
//Distance mount point cords to center of ball bearing mount at triangle
#define INITIAL_BAR_LENGTH 373.0
//Mount point cords on square tube
#define RADIUS_CORD_MOUNT 23.0
//Height from pivot point servo 4 to gripper
#define LEVER_S5 50.0
//Horizontal distance from pivot point servo 4 to tip of gripper
#define GRIPPER_LENGTH 60.0
//Horizontal offset from pivot point Servo 3 to centerline gripper
#define GRIPPER_OFFSET 5.0
//Time between two steps of platform motors
#define P_PAUSE 20000
//Time between two steps of WinchBot
#define STEP_PAUSE 500
//Pause needed for high signal on step input of motor driver
#define STEP_COMMAND_PAUSE 5
#define PI 3.1415927
//200 steps per turn, 7 teeth to 70 teeth
#define STEPS_PER_ANGLE 5.55555556
//Pin numbers WiringPi
#define M1_DIR 24 //Direction output motor
#define M1_STEP 25 //PWM output motor
#define M2_DIR 30 //Direction output motor
#define M2_STEP 21 //PWM output motor
#define M3_DIR 22 //Direction output motor
#define M3_STEP 23 //PWM output motor
#define ENABLE_MOTORS 26 //Motors disabled if pin LOW
#define MOTOR_P1_A 15
#define MOTOR_P1_B 16
#define MOTOR_P1_C 1
#define MOTOR_P1_D 4
#define MOTOR_P2_A 13
#define MOTOR_P2_B 14
#define MOTOR_P2_C 12
#define MOTOR_P2_D 3
#define FLASHLIGHT_1 5
#define FLASHLIGHT_2 6
#define FLASHLIGHT_3 10
//Pin numbers pigpio !!!
#define SERVO_3 16 //Servo arm rotate
#define SERVO_4 17 //Servo arm tilt
#define SERVO_5 27 //Servo gripper
#define SERVO_3_MIN 0
#define SERVO_3_MAX 180
#define SERVO_4_MIN 0
#define SERVO_4_MAX 180
#define SERVO_5_MIN 0
#define SERVO_5_MAX 180
int run = 1;
//12 teeth 80 teeth 2000 steps per revolution diameter drum 51.5mm
double StepsPermm = 13333.3 / 162.0;
double length1, length2, length3;
int Servo3 = 90;
int Servo4 = 90;
int Servo5 = 90;
#define SERVO_3_OFFSET -30
#define SERVO_4_OFFSET 30
#define SERVO_5_OFFSET 0
long currentX = 0, currentY = 0, currentZ = 0;
double M1X, M1Y, M1Z;
double M2X, M2Y, M2Z;
double M3X, M3Y, M3Z;
int MotorP1Step = 0;
int MotorP2Step = 0;
double AngleP1 = 0.0;
double AngleP2 = 0.0;
//Catch term signal
void stop(int signum){
run = 0;
}
//++++++++++++++++++++++++++++++ move servo 3 (arm rotate) ++++++++++++++++++++++++++++++++++++++++++++++++
void moveServo3(int direction){
if((Servo3 < SERVO_3_MAX && direction > 0) || (Servo3 > SERVO_3_MIN && direction < 0)){
Servo3 += direction;
gpioServo(SERVO_3, (Servo3 + SERVO_3_OFFSET) * 1000 / 90 + 500);
}
}
//++++++++++++++++++++++++++++++ move servo 4 (arm tilt) ++++++++++++++++++++++++++++++++++++++++++++++++++
void moveServo4(int direction){
if((Servo4 < SERVO_4_MAX && direction > 0) || (Servo4 > SERVO_4_MIN && direction < 0)){
Servo4 += direction;
gpioServo(SERVO_4, (Servo4 + SERVO_4_OFFSET) * 1000 / 90 + 500);
}
}
//++++++++++++++++++++++++++++++ move servo 5 (gripper) +++++++++++++++++++++++++++++++++++++++++++++++++++
void moveServo5(int direction){
if((Servo5 < SERVO_5_MAX && direction > 0) || (Servo5 > SERVO_5_MIN && direction < 0)){
Servo5 += direction;
gpioServo(SERVO_5, (Servo5 + SERVO_5_OFFSET) * 1000 / 90 + 500);
}
}
//++++++++++++++++++++++++++++++ move motor P1 +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void motorP1(long steps, long uPause){
long i;
AngleP1 += steps;
//printf("Moving motor1 for %ld steps\n", steps);
for(i=0; i<abs(steps); i++){
if(steps > 0){
MotorP1Step++;
}
else{
MotorP1Step--;
}
if(MotorP1Step > 3){
MotorP1Step = 0;
}
if(MotorP1Step < 0){
MotorP1Step = 3;
}
if(MotorP1Step == 0){
digitalWrite(MOTOR_P1_A, 1);
digitalWrite(MOTOR_P1_B, 0);
digitalWrite(MOTOR_P1_C, 0);
digitalWrite(MOTOR_P1_D, 0);
}
if(MotorP1Step == 1){
digitalWrite(MOTOR_P1_A, 0);
digitalWrite(MOTOR_P1_B, 0);
digitalWrite(MOTOR_P1_C, 1);
digitalWrite(MOTOR_P1_D, 0);
}
if(MotorP1Step == 2){
digitalWrite(MOTOR_P1_A, 0);
digitalWrite(MOTOR_P1_B, 1);
digitalWrite(MOTOR_P1_C, 0);
digitalWrite(MOTOR_P1_D, 0);
}
if(MotorP1Step == 3){
digitalWrite(MOTOR_P1_A, 0);
digitalWrite(MOTOR_P1_B, 0);
digitalWrite(MOTOR_P1_C, 0);
digitalWrite(MOTOR_P1_D, 1);
}
usleep(uPause);
}
}
//++++++++++++++++++++++++++++++ move motor P2 +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void motorP2(long steps, long uPause){
long i;
AngleP2 += steps;
//printf("Moving motor1 for %ld steps\n", steps);
for(i=0; i<abs(steps); i++){
if(steps > 0){
MotorP2Step++;
}
else{
MotorP2Step--;
}
if(MotorP2Step > 3){
MotorP2Step = 0;
}
if(MotorP2Step < 0){
MotorP2Step = 3;
}
if(MotorP2Step == 0){
digitalWrite(MOTOR_P2_A, 1);
digitalWrite(MOTOR_P2_B, 0);
digitalWrite(MOTOR_P2_C, 0);
digitalWrite(MOTOR_P2_D, 0);
}
if(MotorP2Step == 1){
digitalWrite(MOTOR_P2_A, 0);
digitalWrite(MOTOR_P2_B, 0);
digitalWrite(MOTOR_P2_C, 1);
digitalWrite(MOTOR_P2_D, 0);
}
if(MotorP2Step == 2){
digitalWrite(MOTOR_P2_A, 0);
digitalWrite(MOTOR_P2_B, 1);
digitalWrite(MOTOR_P2_C, 0);
digitalWrite(MOTOR_P2_D, 0);
}
if(MotorP2Step == 3){
digitalWrite(MOTOR_P2_A, 0);
digitalWrite(MOTOR_P2_B, 0);
digitalWrite(MOTOR_P2_C, 0);
digitalWrite(MOTOR_P2_D, 1);
}
usleep(uPause);
}
}
//++++++++++++++++++++++++++++++ move motor 1 +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void motor1(long steps, long uPause){
long i;
length1 += steps;
//printf("Moving motor1 for %ld steps\n", steps);
if(steps < 0){
digitalWrite(M1_DIR, 1);
}
else{
digitalWrite(M1_DIR, 0);
}
if(steps != 0){
for(i=0; i < labs(steps); i++){
digitalWrite(M1_STEP, 1);
usleep(STEP_COMMAND_PAUSE);
digitalWrite(M1_STEP, 0);
usleep(uPause);
}
}
}
//++++++++++++++++++++++++++++++ move motor 2 +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void motor2(long steps, long uPause){
long i;
length2 += steps;
//printf("Moving motor2 for %ld steps\n", steps);
if(steps < 0){
digitalWrite(M2_DIR, 1);
}
else{
digitalWrite(M2_DIR, 0);
}
if(steps != 0){
for(i=0; i < labs(steps); i++){
digitalWrite(M2_STEP, 1);
usleep(STEP_COMMAND_PAUSE);
digitalWrite(M2_STEP, 0);
usleep(uPause);
}
}
}
//++++++++++++++++++++++++++++++ move motor 3 +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void motor3(long steps, long uPause){
long i;
length3 += steps;
//printf("Moving motor3 for %ld steps\n", steps);
if(steps < 0){
digitalWrite(M3_DIR, 1);
}
else{
digitalWrite(M3_DIR, 0);
}
if(steps != 0){
for(i=0; i < labs(steps); i++){
digitalWrite(M3_STEP, 1);
usleep(STEP_COMMAND_PAUSE);
digitalWrite(M3_STEP, 0);
usleep(uPause);
}
}
}
//++++++++++++++++++++++++++++++++++++++ MoveToCoordinates +++++++++++++++++++++++++++++++++++++++++++++++++++++
int MoveToCoordinates(long X, long Y, long Z, int Servo3New, int Servo4New, int Servo5New, long sleepTime){
double length1New, length2New, length3New;
double M1MountX, M1MountY, M1MountZ;
double M2MountX, M2MountY, M2MountZ;
double M3MountX, M3MountY, M3MountZ;
// long offsetX, offsetY, offsetZ;
// long tempX, tempY, tempZ;
long stepDiff = 0;
// double alpha = 90.0, beta = 90.0;
// double alpha3;
// double alpha4;
// long barMountZ;
double alpha, beta;
double AngleP1New, AngleP2New;
struct timeval tv;
unsigned long uTimeStart, uTimeNow, longTemp;
unsigned long uNowM1, uNowM2, uNowM3, uNowP1, uNowP2, uNowS3, uNowS4, uNowS5;
unsigned long uDiffM1, uDiffM2, uDiffM3, uDiffP1, uDiffP2, uDiffS3, uDiffS4, uDiffS5;
unsigned long uTimeDiff;
printf("Moving to X=%ld, Y=%ld, Z=%ld, Servo3=%d, Servo4=%d, Servo5=%d\n", X, Y, Z, Servo3New, Servo4New, Servo5New);
if(Servo3New > SERVO_3_MAX){
Servo3New = SERVO_3_MAX;
}
if(Servo3New < SERVO_3_MIN){
Servo3New = SERVO_3_MIN;
}
if(Servo4New > SERVO_4_MAX){
Servo4New = SERVO_4_MAX;
}
if(Servo4New < SERVO_4_MIN){
Servo4New = SERVO_4_MIN;
}
if(Servo5New > SERVO_5_MAX){
Servo5New = SERVO_5_MAX;
}
if(Servo5New < SERVO_5_MIN){
Servo5New = SERVO_5_MIN;
}
/*
// barMountZ = INITIAL_BAR_LENGTH * StepsPermm;
offsetX = GRIPPER_OFFSET * StepsPermm;
offsetY = -GRIPPER_LENGTH * StepsPermm;
offsetZ = LEVER_S5 * StepsPermm;
offsetX = 0;
offsetY = 0;
offsetZ = 0;
//calculate X/Y/Z offset caused by rotation of servos 3 and 4
alpha3 = Servo3New - 90;
alpha4 = Servo4New - 90;
tempZ = offsetZ * cos(alpha4 * PI / 180.0) - offsetY * sin(alpha4 * PI / 180.0);
tempY = offsetY * cos(alpha4 * PI / 180.0) + offsetZ * sin(alpha4 * PI / 180.0);
offsetY = tempY;
tempX = offsetX * cos(alpha3 * PI / 180.0) - offsetY * sin(alpha3 * PI / 180.0);
tempY = offsetY * cos(alpha3 * PI / 180.0) + offsetX * sin(alpha3 * PI / 180.0);
tempX -= GRIPPER_OFFSET * StepsPermm;
tempY += GRIPPER_LENGTH * StepsPermm;
tempY = -tempY;
tempZ -= LEVER_S5 * StepsPermm;
offsetX = X + tempX;
offsetY = Y + tempY;
offsetZ = Z + tempZ;
if(offsetY != 0){
alpha = atan((double)(barMountZ - offsetZ) / (double)(offsetY)) * 180.0 / PI;
}
if(offsetX != 0){
beta = atan((double)((barMountZ - offsetZ) / offsetX)) * 180.0 / PI;
}
*/
alpha = atan(Y/(INITIAL_BAR_LENGTH * StepsPermm - Z))*180 / PI;
beta = atan(X/(INITIAL_BAR_LENGTH * StepsPermm - Z))*180 / PI;
AngleP1New = round(alpha * STEPS_PER_ANGLE);
AngleP2New = round(beta * STEPS_PER_ANGLE);
M1MountX = X + RADIUS_CORD_MOUNT * StepsPermm * cos(30.0 * PI / 180.0) * cos(alpha) * cos(beta);
M1MountY = Y - RADIUS_CORD_MOUNT * StepsPermm * sin(30.0 * PI / 180.0) * cos(alpha) * cos(beta);
M1MountZ = Z - RADIUS_CORD_MOUNT * StepsPermm * sin(30.0 * PI / 180.0) * sin(alpha) * sin(beta);;
M2MountX = X;
M2MountY = Y + cos(alpha) * RADIUS_CORD_MOUNT * StepsPermm;
M2MountZ = Z + sin(alpha) * RADIUS_CORD_MOUNT * StepsPermm;
M3MountX = X - RADIUS_CORD_MOUNT * StepsPermm * cos(30.0 * PI / 180.0) * cos(alpha) * cos(beta);
M3MountY = Y - RADIUS_CORD_MOUNT * StepsPermm * sin(30.0 * PI / 180.0) * cos(alpha) * cos(beta);
M3MountZ = Z - RADIUS_CORD_MOUNT * StepsPermm * sin(30.0 * PI / 180.0) * sin(alpha) * sin(beta);;
length1New = labs(sqrt(pow(M1X - M1MountX, 2.0) + pow(M1Y - M1MountY, 2.0) + pow(M1Z - M1MountZ, 2.0)));
length2New = labs(sqrt(pow(M2X - M2MountX, 2.0) + pow(M2Y - M2MountY, 2.0) + pow(M2Z - M2MountZ, 2.0)));
length3New = labs(sqrt(pow(M3X - M3MountX, 2.0) + pow(M3Y - M3MountY, 2.0) + pow(M3Z - M3MountZ, 2.0)));
length1New = labs(sqrt(pow(M1X - X, 2.0) + pow(M1Y - Y, 2.0) + pow(M1Z - Z, 2.0)));
length2New = labs(sqrt(pow(M2X - X, 2.0) + pow(M2Y - Y, 2.0) + pow(M2Z - Z, 2.0)));
length3New = labs(sqrt(pow(M3X - X, 2.0) + pow(M3Y - Y, 2.0) + pow(M3Z - Z, 2.0)));
stepDiff = abs(length1New - length1);
if(abs(length2New - length2) > stepDiff){
stepDiff = abs(length2New - length2);
}
if(abs(length3New - length3) > stepDiff){
stepDiff = abs(length3New - length3);
}
if(abs(AngleP1New - AngleP1) > stepDiff){
stepDiff = abs(AngleP1New - AngleP1);
}
if(abs(AngleP2New - AngleP2) > stepDiff){
stepDiff = abs(AngleP2New - AngleP2);
}
if(abs(Servo3New - Servo3) > stepDiff){
stepDiff = abs(Servo3New - Servo3);
}
if(abs(Servo4New - Servo4) > stepDiff){
stepDiff = abs(Servo4New - Servo4);
}
if(abs(Servo5New - Servo5) > stepDiff){
stepDiff = abs(Servo5New - Servo5);
}
printf("length1New - length1 = %lf, length2New - length2 = %lf, length3New - length3 = %lf\n", length1New - length1, length2New - length2, length3New - length3);
gettimeofday(&tv,NULL);
uTimeStart = 1000000 * tv.tv_sec + tv.tv_usec;
longTemp = uTimeStart / 100000000;
uTimeStart -= longTemp * 100000000;
uTimeDiff = 0;
if(abs(length1New - length1)!=0){
uDiffM1 = stepDiff*STEP_PAUSE / abs(length1New - length1);
}
else{
uDiffM1 = stepDiff*STEP_PAUSE +1000;
}
if(abs(length2New - length2)!=0){
uDiffM2 = stepDiff*STEP_PAUSE / abs(length2New - length2);
}
else{
uDiffM2 = stepDiff*STEP_PAUSE +1000;
}
if(abs(length3New - length3)!=0){
uDiffM3 = stepDiff*STEP_PAUSE / abs(length3New - length3);
}
else{
uDiffM3 = stepDiff*STEP_PAUSE +1000;
}
if(abs(AngleP1New - AngleP1)!=0){
uDiffP1 = stepDiff*STEP_PAUSE / abs(AngleP1New - AngleP1);
}
else{
uDiffP1 = stepDiff*STEP_PAUSE +1000;
}
if(abs(AngleP2New - AngleP2)!=0){
uDiffP2 = stepDiff*STEP_PAUSE / abs(AngleP2New - AngleP2);
}
else{
uDiffP2 = stepDiff*STEP_PAUSE +1000;
}
if(abs(Servo3New - Servo3)!=0){
uDiffS3 = stepDiff*STEP_PAUSE / abs(Servo3New - Servo3);
}
else{
uDiffS3 = stepDiff*STEP_PAUSE +1000;
}
if(abs(Servo4New - Servo4)!=0){
uDiffS4 = stepDiff*STEP_PAUSE / abs(Servo4New - Servo4);
}
else{
uDiffS4 = stepDiff*STEP_PAUSE +1000;
}
if(abs(Servo5New - Servo5)!=0){
uDiffS5 = stepDiff*STEP_PAUSE / abs(Servo5New - Servo5);
}
else{
uDiffS5 = stepDiff*STEP_PAUSE +1000;
}
uNowM1 = 0;
uNowM2 = 0;
uNowM3 = 0;
uNowP1 = 0;
uNowP2 = 0;
uNowS3 = 0;
uNowS4 = 0;
uNowS5 = 0;
while(uTimeDiff < stepDiff*STEP_PAUSE){
gettimeofday(&tv,NULL);
uTimeNow = 1000000 * tv.tv_sec + tv.tv_usec;
longTemp = uTimeNow / 100000000;
uTimeNow -= longTemp * 100000000;
if(uTimeNow < uTimeStart){//Movement no longer than 100s to avoid overflow!
uTimeNow += 100000000;
}
uTimeDiff = uTimeNow-uTimeStart;
if(uTimeDiff - uNowM1 >= uDiffM1){
if(length1New > length1){
motor1(1, 0);
}
if(length1New < length1){
motor1(-1, 0);
}
uNowM1+=uDiffM1;
}
if(uTimeDiff - uNowM2 >= uDiffM2){
if(length2New > length2){
motor2(1, 0);
}
if(length2New < length2){
motor2(-1, 0);
}
uNowM2+=uDiffM2;
}
if(uTimeDiff - uNowM3 >= uDiffM3){
if(length3New > length3){
motor3(1, 0);
}
if(length3New < length3){
motor3(-1, 0);
}
uNowM3+=uDiffM3;
}
if(uTimeDiff - uNowP1 >= uDiffP1){
if(AngleP1New > AngleP1){
motorP1(1, 0);
}
if(AngleP1New < AngleP1){
motorP1(-1, 0);
}
uNowP1+=uDiffP1;
}
if(uTimeDiff - uNowP2 >= uDiffP2){
if(AngleP2New > AngleP2){
motorP2(1, 0);
}
if(AngleP2New < AngleP2){
motorP2(-1, 0);
}
uNowP2+=uDiffP2;
}
if(uTimeDiff - uNowS3 >= uDiffS3){
if(Servo3New > Servo3){
moveServo3(1);
}
if(Servo3New < Servo3){
moveServo3(-1);
}
uNowS3+=uDiffS3;
}
if(uTimeDiff - uNowS4 >= uDiffS4){
if(Servo4New > Servo4){
moveServo4(1);
}
if(Servo4New < Servo4){
moveServo4(-1);
}
uNowS4+=uDiffS4;
}
if(uTimeDiff - uNowS5 >= uDiffS5){
if(Servo5New > Servo5){
moveServo5(1);
}
if(Servo5New < Servo5){
moveServo5(-1);
}
uNowS5+=uDiffS5;
}
}
while(length1New > length1){
motor1(1, STEP_PAUSE);
printf("length1New=%lf, length1=%lf\n", length1New, length1);
}
while(length1New < length1){
motor1(-1, STEP_PAUSE);
printf("length1New=%lf, length1=%lf\n", length1New, length1);
}
while(length2New > length2){
motor2(1, STEP_PAUSE);
printf("length2New=%lf, length2=%lf\n", length2New, length2);
}
while(length2New < length2){
motor2(-1, STEP_PAUSE);
printf("length2New=%lf, length2=%lf\n", length2New, length2);
}
while(length3New > length3){
motor3(1, STEP_PAUSE);
printf("length3New=%lf, length3=%lf\n", length3New, length3);
}
while(length3New < length3){
motor3(-1, STEP_PAUSE);
printf("length3New=%lf, length3=%lf\n", length3New, length3);
}
while(AngleP1New>AngleP1){
motorP1(1, P_PAUSE);
printf("AngleP1New=%lf, AngleP1=%lf\n", AngleP1New, AngleP1);
}
while(AngleP1New<AngleP1){
motorP1(-1, P_PAUSE);
printf("AngleP1New=%lf, AngleP1=%lf\n", AngleP1New, AngleP1);
}
while(AngleP2New>AngleP2){
motorP2(1, P_PAUSE);
printf("AngleP2New=%lf, AngleP2=%lf\n", AngleP2New, AngleP2);
}
while(AngleP2New<AngleP2){
motorP2(-1, P_PAUSE);
printf("AngleP2New=%lf, AngleP2=%lf\n", AngleP2New, AngleP2);
}
while(Servo3New>Servo3){
moveServo3(1);
printf("ServoNew3=%d, Servo3=%d\n", Servo3New, Servo3);
}
while(Servo3New<Servo3){
moveServo3(-1);
printf("ServoNew3=%d, Servo3=%d\n", Servo3New, Servo3);
}
while(Servo4New>Servo4){
moveServo4(1);
printf("ServoNew4=%d, Servo4=%d\n", Servo4New, Servo4);
}
while(Servo4New<Servo4){
moveServo4(-1);
printf("ServoNew4=%d, Servo4=%d\n", Servo4New, Servo4);
}
while(Servo5New>Servo5){
moveServo5(1);
printf("ServoNew5=%d, Servo5=%d\n", Servo5New, Servo5);
}
while(Servo5New<Servo5){
moveServo5(-1);
printf("ServoNew5=%d, Servo5=%d\n", Servo5New, Servo5);
}
currentX = X;
currentY = Y;
currentZ = Z;
return 0;
}
//-------------------------------------- MoveToCoordinates -----------------------------------------------
//######################################################################
//################## Main ##############################################
//######################################################################
int main(int argc, char **argv){
long i;
long stepNumber = 0;
FILE *commandsFile;
FILE *ReplayFile;
char commandsLine[1000];
char TextLine[1000];
char *pEnd;
int stopPlot = 0;
int coordReadNo = 0;
long goToX, goToY, goToZ, goToS3, goToS4, goToS5;
long sleepTime;
int gripperOld = 90;
if (wiringPiSetup () == -1){
printf("Could not run wiringPiSetup!");
exit(1);
}
if (gpioInitialise() < 0){
printf("Could not run gpioInitialise!");
exit(1);
}
gpioSetSignalFunc(SIGINT, stop);
pinMode (M1_DIR, OUTPUT);
pinMode (M1_STEP, OUTPUT);
pinMode (M2_DIR, OUTPUT);
pinMode (M2_STEP, OUTPUT);
pinMode (M3_DIR, OUTPUT);
pinMode (M3_STEP, OUTPUT);
pinMode (ENABLE_MOTORS, OUTPUT);
digitalWrite(ENABLE_MOTORS, 1);
pinMode (MOTOR_P1_A, OUTPUT);
pinMode (MOTOR_P1_B, OUTPUT);
pinMode (MOTOR_P1_C, OUTPUT);
pinMode (MOTOR_P1_D, OUTPUT);
pinMode (MOTOR_P2_A, OUTPUT);
pinMode (MOTOR_P2_B, OUTPUT);
pinMode (MOTOR_P2_C, OUTPUT);
pinMode (MOTOR_P2_D, OUTPUT);
pinMode (FLASHLIGHT_1, OUTPUT);
pinMode (FLASHLIGHT_2, OUTPUT);
pinMode (FLASHLIGHT_3, OUTPUT);
gpioServo(SERVO_3, (Servo3 + SERVO_3_OFFSET) * 1000 / 90 + 500);
gpioServo(SERVO_4, (Servo4 + SERVO_4_OFFSET) * 1000 / 90 + 500);
gpioServo(SERVO_5, (Servo5 + SERVO_5_OFFSET) * 1000 / 90 + 500);
/*
gpioServo(SERVO_5, Servo5 * 1000 / 90 + 500);
sleep(3);
gpioServo(SERVO_5, 45 * 1000 / 90 + 500);
sleep(3);
gpioServo(SERVO_5, 135 * 1000 / 90 + 500);
sleep(3);
digitalWrite(ENABLE_MOTORS, 0); gpioTerminate(); exit(0);//!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
*/
//Calculate XYZ coordinates of motors
M1X = -BASELENGTH / 2.0;
M1Y = BASELENGTH / 2.0 * tan(30.0 * PI / 180.0);
M2X = 0.0;
M2Y = -(BASELENGTH * cos(30.0 * PI / 180.0) - M1Y);
M3X = BASELENGTH / 2.0;
M3Y = BASELENGTH / 2.0 * tan(30.0 * PI / 180.0);
M2Z = sqrt(pow(INITIAL_LENGTH, 2.0) - pow(M2Y + RADIUS_CORD_MOUNT, 2.0));
M1Z = M2Z;
M3Z = M2Z;
M1X = M1X * StepsPermm;
M1Y = M1Y * StepsPermm;
M1Z = M1Z * StepsPermm;
M2X = M2X * StepsPermm;
M2Y = M2Y * StepsPermm;
M2Z = M2Z * StepsPermm;
M3X = M3X * StepsPermm;
M3Y = M3Y * StepsPermm;
M3Z = M3Z * StepsPermm;
printf("\n\nKoordinates in steps:\n");
printf("M1X = %lf, M1Y = %lf, M1Z = %lf\n", M1X, M1Y, M1Z);
printf("M2X = %lf, M2Y = %lf, M2Z = %lf\n", M2X, M2Y, M2Z);
printf("M3X = %lf, M3Y = %lf, M3Z = %lf\n", M3X, M3Y, M3Z);
length1 = labs(INITIAL_LENGTH * StepsPermm);
length2 = labs(INITIAL_LENGTH * StepsPermm);
length3 = labs(INITIAL_LENGTH * StepsPermm);
// Simple calculation
length1 = labs(sqrt(pow(M1X, 2.0) + pow(M1Y, 2.0) + pow(M1Z, 2.0)));
length2 = labs(sqrt(pow(M2X, 2.0) + pow(M2Y, 2.0) + pow(M2Z, 2.0)));
length3 = labs(sqrt(pow(M3X, 2.0) + pow(M3Y, 2.0) + pow(M3Z, 2.0)));
printf("length1 = %lf, length2 = %lf, length3 = %lf\n", length1, length2, length3);
/*
motor1(1000);
motor1(-1000);
sleep(3);
motor2(1000);
motor2(-1000);
sleep(3);
motor3(1000);
motor3(-1000);
sleep(3);
*/
// MoveToCoordinates(10000, 0, 0, Servo3, Servo4,Servo5);
// sleep(3);
// MoveToCoordinates(0, 0, 0, Servo3, Servo4,Servo5);
// sleep(3);
// digitalWrite(ENABLE_MOTORS, 0); gpioTerminate(); exit(0);//!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
printf("Moving P1 20\n");
for(i=0;i<20;i++){
motorP1(1, P_PAUSE);
usleep(20000);
}
printf("...done!\n");
sleep(2);
printf("Moving P1 -20\n");
for(i=0;i<20;i++){
motorP1(-1, P_PAUSE);
usleep(20000);
}
printf("...done!\n");
printf("Moving P2 20\n");
for(i=0;i<20;i++){
motorP2(1, P_PAUSE);
usleep(20000);
}
printf("...done!\n");
sleep(2);
printf("Moving P2 -20\n");
for(i=0;i<20;i++){
motorP2(-1, P_PAUSE);
usleep(20000);
}
printf("...done!\n");
while(run){
if(access("WinchBotCommands.txt", W_OK) != -1) {
//sleep(1);
if (!(commandsFile = fopen("WinchBotCommands.txt", "r"))){
printf("Can't open WinchBotCommands.txt!\n");
run = 0;
}
else{
char a = 0;
i = 0;
commandsLine[0] = '\0';
while((!(feof(commandsFile))) && a != 13 && i < 1000){
fread(&a, 1, 1, commandsFile);
commandsLine[i] = a;
commandsLine[i+1] = '\0';
i++;
//printf("'%c'", a);
}
printf("commandsLine='%s'\n", commandsLine);
//Store current coordinates in file
if(strstr(commandsLine, "STORE")!=NULL){
sprintf(TextLine, "echo \"% 7ld, % 7ld, % 7ld, % 7d, % 7d, % 7d, 0;\" >> coordinates.bot", currentX, currentY, currentZ, Servo3, Servo4, Servo5);
system(TextLine);
}
//Store current coordinates in file
if(strstr(commandsLine, "DELETEALL")!=NULL){
system("rm coordinates.bot");
}
//Go to initial position
if(strstr(commandsLine, "INIT")!=NULL){
MoveToCoordinates(0, 0, 0, 90, 90, 90, 0);
}
//Replay file
if(strstr(commandsLine, "REPLAY")!=NULL){
if((ReplayFile=fopen("coordinates.bot","rb"))!=NULL){
printf("Replaying coordinates.bot\n");
//PlotStartTime = time(0);
//coordinateCount = 0;
stopPlot = 0;
coordReadNo = 0;
while(!(feof(ReplayFile)) && stopPlot == 0){
fread(&a, 1, 1, ReplayFile);
printf("%c", a);
i=0;
TextLine[0] = '\0';
while(!(feof(ReplayFile)) && a !=' ' && a != ';' && a != '\"' && a != ',' && a != 10 && a!= 13){
TextLine[i] = a;
TextLine[i+1] = '\0';
i++;
fread(&a, 1, 1, ReplayFile);
printf("%c", a);
}
if(a == '#'){
while(!(feof(ReplayFile)) && a != 10 && a!= 13){
fread(&a, 1, 1, ReplayFile);
printf("%c", a);
}
}
if(a == ',' || a == ';'){//Coordinates found
coordReadNo++;
if(coordReadNo == 1){
goToX = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 2){
goToY = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 3){
goToZ = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 4){
goToS3 = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 5){
goToS4 = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 6){
goToS5 = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 7){
...
This file has been truncated, please download it to see its full contents.
//Project: WinchBot 1.5
//Homepage: www.HomoFaciens.de
//Author Norbert Heinz
//Version: 0.1
//Creation date: 04.12.2017
//
//compile with gcc WinchBot-1-5.c -o WinchBot-1-5 -I/usr/local/include -L/usr/local/lib -lwiringPi -lm -lpigpio -pthread -Wall
//For details see:
//https://www.homofaciens.de/technics-machines-winchbot-1-5_en.htm
#include <stdio.h>
#include <termios.h>
#include <sys/ioctl.h>
#include <stdlib.h>
#include <string.h>
#include <time.h>
#include <sys/time.h>
#include <dirent.h>
#include <math.h>
#include <wiringPi.h>
#include <unistd.h>
#include <pigpio.h>
#include <signal.h>
//Base length of triangle in mm
#define BASELENGTH 895.0
//Initial cord length in mm
#define INITIAL_LENGTH 600.0
//Distance mount point cords to center of ball bearing mount at triangle
#define INITIAL_BAR_LENGTH 373.0
//Mount point cords on square tube
#define RADIUS_CORD_MOUNT 23.0
//Height from pivot point servo 4 to gripper
#define LEVER_S5 50.0
//Horizontal distance from pivot point servo 4 to tip of gripper
#define GRIPPER_LENGTH 60.0
//Horizontal offset from pivot point Servo 3 to centerline gripper
#define GRIPPER_OFFSET 5.0
//Time between two steps of platform motors
#define P_PAUSE 20000
//Time between two steps of WinchBot
#define STEP_PAUSE 500
//Pause needed for high signal on step input of motor driver
#define STEP_COMMAND_PAUSE 5
#define PI 3.1415927
//200 steps per turn, 7 teeth to 70 teeth
#define STEPS_PER_ANGLE 5.55555556
//Pin numbers WiringPi
#define M1_DIR 24 //Direction output motor
#define M1_STEP 25 //PWM output motor
#define M2_DIR 30 //Direction output motor
#define M2_STEP 21 //PWM output motor
#define M3_DIR 22 //Direction output motor
#define M3_STEP 23 //PWM output motor
#define ENABLE_MOTORS 26 //Motors disabled if pin LOW
#define MOTOR_P1_A 15
#define MOTOR_P1_B 16
#define MOTOR_P1_C 1
#define MOTOR_P1_D 4
#define MOTOR_P2_A 13
#define MOTOR_P2_B 14
#define MOTOR_P2_C 12
#define MOTOR_P2_D 3
#define FLASHLIGHT_1 5
#define FLASHLIGHT_2 6
#define FLASHLIGHT_3 10
//Pin numbers pigpio !!!
#define SERVO_3 16 //Servo arm rotate
#define SERVO_4 17 //Servo arm tilt
#define SERVO_5 27 //Servo gripper
#define SERVO_3_MIN 0
#define SERVO_3_MAX 180
#define SERVO_4_MIN 0
#define SERVO_4_MAX 180
#define SERVO_5_MIN 0
#define SERVO_5_MAX 180
int run = 1;
//12 teeth 80 teeth 2000 steps per revolution diameter drum 51.5mm
double StepsPermm = 13333.3 / 162.0;
double length1, length2, length3;
int Servo3 = 90;
int Servo4 = 90;
int Servo5 = 90;
#define SERVO_3_OFFSET -30
#define SERVO_4_OFFSET 30
#define SERVO_5_OFFSET 0
long currentX = 0, currentY = 0, currentZ = 0;
double M1X, M1Y, M1Z;
double M2X, M2Y, M2Z;
double M3X, M3Y, M3Z;
int MotorP1Step = 0;
int MotorP2Step = 0;
double AngleP1 = 0.0;
double AngleP2 = 0.0;
//Catch term signal
void stop(int signum){
run = 0;
}
//++++++++++++++++++++++++++++++ move servo 3 (arm rotate) ++++++++++++++++++++++++++++++++++++++++++++++++
void moveServo3(int direction){
if((Servo3 < SERVO_3_MAX && direction > 0) || (Servo3 > SERVO_3_MIN && direction < 0)){
Servo3 += direction;
gpioServo(SERVO_3, (Servo3 + SERVO_3_OFFSET) * 1000 / 90 + 500);
}
}
//++++++++++++++++++++++++++++++ move servo 4 (arm tilt) ++++++++++++++++++++++++++++++++++++++++++++++++++
void moveServo4(int direction){
if((Servo4 < SERVO_4_MAX && direction > 0) || (Servo4 > SERVO_4_MIN && direction < 0)){
Servo4 += direction;
gpioServo(SERVO_4, (Servo4 + SERVO_4_OFFSET) * 1000 / 90 + 500);
}
}
//++++++++++++++++++++++++++++++ move servo 5 (gripper) +++++++++++++++++++++++++++++++++++++++++++++++++++
void moveServo5(int direction){
if((Servo5 < SERVO_5_MAX && direction > 0) || (Servo5 > SERVO_5_MIN && direction < 0)){
Servo5 += direction;
gpioServo(SERVO_5, (Servo5 + SERVO_5_OFFSET) * 1000 / 90 + 500);
}
}
//++++++++++++++++++++++++++++++ move motor P1 +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void motorP1(long steps, long uPause){
long i;
AngleP1 += steps;
//printf("Moving motor1 for %ld steps\n", steps);
for(i=0; i<abs(steps); i++){
if(steps > 0){
MotorP1Step++;
}
else{
MotorP1Step--;
}
if(MotorP1Step > 3){
MotorP1Step = 0;
}
if(MotorP1Step < 0){
MotorP1Step = 3;
}
if(MotorP1Step == 0){
digitalWrite(MOTOR_P1_A, 1);
digitalWrite(MOTOR_P1_B, 0);
digitalWrite(MOTOR_P1_C, 0);
digitalWrite(MOTOR_P1_D, 0);
}
if(MotorP1Step == 1){
digitalWrite(MOTOR_P1_A, 0);
digitalWrite(MOTOR_P1_B, 0);
digitalWrite(MOTOR_P1_C, 1);
digitalWrite(MOTOR_P1_D, 0);
}
if(MotorP1Step == 2){
digitalWrite(MOTOR_P1_A, 0);
digitalWrite(MOTOR_P1_B, 1);
digitalWrite(MOTOR_P1_C, 0);
digitalWrite(MOTOR_P1_D, 0);
}
if(MotorP1Step == 3){
digitalWrite(MOTOR_P1_A, 0);
digitalWrite(MOTOR_P1_B, 0);
digitalWrite(MOTOR_P1_C, 0);
digitalWrite(MOTOR_P1_D, 1);
}
usleep(uPause);
}
}
//++++++++++++++++++++++++++++++ move motor P2 +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void motorP2(long steps, long uPause){
long i;
AngleP2 += steps;
//printf("Moving motor1 for %ld steps\n", steps);
for(i=0; i<abs(steps); i++){
if(steps > 0){
MotorP2Step++;
}
else{
MotorP2Step--;
}
if(MotorP2Step > 3){
MotorP2Step = 0;
}
if(MotorP2Step < 0){
MotorP2Step = 3;
}
if(MotorP2Step == 0){
digitalWrite(MOTOR_P2_A, 1);
digitalWrite(MOTOR_P2_B, 0);
digitalWrite(MOTOR_P2_C, 0);
digitalWrite(MOTOR_P2_D, 0);
}
if(MotorP2Step == 1){
digitalWrite(MOTOR_P2_A, 0);
digitalWrite(MOTOR_P2_B, 0);
digitalWrite(MOTOR_P2_C, 1);
digitalWrite(MOTOR_P2_D, 0);
}
if(MotorP2Step == 2){
digitalWrite(MOTOR_P2_A, 0);
digitalWrite(MOTOR_P2_B, 1);
digitalWrite(MOTOR_P2_C, 0);
digitalWrite(MOTOR_P2_D, 0);
}
if(MotorP2Step == 3){
digitalWrite(MOTOR_P2_A, 0);
digitalWrite(MOTOR_P2_B, 0);
digitalWrite(MOTOR_P2_C, 0);
digitalWrite(MOTOR_P2_D, 1);
}
usleep(uPause);
}
}
//++++++++++++++++++++++++++++++ move motor 1 +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void motor1(long steps, long uPause){
long i;
length1 += steps;
//printf("Moving motor1 for %ld steps\n", steps);
if(steps < 0){
digitalWrite(M1_DIR, 1);
}
else{
digitalWrite(M1_DIR, 0);
}
if(steps != 0){
for(i=0; i < labs(steps); i++){
digitalWrite(M1_STEP, 1);
usleep(STEP_COMMAND_PAUSE);
digitalWrite(M1_STEP, 0);
usleep(uPause);
}
}
}
//++++++++++++++++++++++++++++++ move motor 2 +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void motor2(long steps, long uPause){
long i;
length2 += steps;
//printf("Moving motor2 for %ld steps\n", steps);
if(steps < 0){
digitalWrite(M2_DIR, 1);
}
else{
digitalWrite(M2_DIR, 0);
}
if(steps != 0){
for(i=0; i < labs(steps); i++){
digitalWrite(M2_STEP, 1);
usleep(STEP_COMMAND_PAUSE);
digitalWrite(M2_STEP, 0);
usleep(uPause);
}
}
}
//++++++++++++++++++++++++++++++ move motor 3 +++++++++++++++++++++++++++++++++++++++++++++++++++++++++++++
void motor3(long steps, long uPause){
long i;
length3 += steps;
//printf("Moving motor3 for %ld steps\n", steps);
if(steps < 0){
digitalWrite(M3_DIR, 1);
}
else{
digitalWrite(M3_DIR, 0);
}
if(steps != 0){
for(i=0; i < labs(steps); i++){
digitalWrite(M3_STEP, 1);
usleep(STEP_COMMAND_PAUSE);
digitalWrite(M3_STEP, 0);
usleep(uPause);
}
}
}
//++++++++++++++++++++++++++++++++++++++ MoveToCoordinates +++++++++++++++++++++++++++++++++++++++++++++++++++++
int MoveToCoordinates(long X, long Y, long Z, int Servo3New, int Servo4New, int Servo5New, long sleepTime){
double length1New, length2New, length3New;
double M1MountX, M1MountY, M1MountZ;
double M2MountX, M2MountY, M2MountZ;
double M3MountX, M3MountY, M3MountZ;
// long offsetX, offsetY, offsetZ;
// long tempX, tempY, tempZ;
long stepDiff = 0;
// double alpha = 90.0, beta = 90.0;
// double alpha3;
// double alpha4;
// long barMountZ;
double alpha, beta;
double AngleP1New, AngleP2New;
struct timeval tv;
unsigned long uTimeStart, uTimeNow, longTemp;
unsigned long uNowM1, uNowM2, uNowM3, uNowP1, uNowP2, uNowS3, uNowS4, uNowS5;
unsigned long uDiffM1, uDiffM2, uDiffM3, uDiffP1, uDiffP2, uDiffS3, uDiffS4, uDiffS5;
unsigned long uTimeDiff;
printf("Moving to X=%ld, Y=%ld, Z=%ld, Servo3=%d, Servo4=%d, Servo5=%d\n", X, Y, Z, Servo3New, Servo4New, Servo5New);
if(Servo3New > SERVO_3_MAX){
Servo3New = SERVO_3_MAX;
}
if(Servo3New < SERVO_3_MIN){
Servo3New = SERVO_3_MIN;
}
if(Servo4New > SERVO_4_MAX){
Servo4New = SERVO_4_MAX;
}
if(Servo4New < SERVO_4_MIN){
Servo4New = SERVO_4_MIN;
}
if(Servo5New > SERVO_5_MAX){
Servo5New = SERVO_5_MAX;
}
if(Servo5New < SERVO_5_MIN){
Servo5New = SERVO_5_MIN;
}
/*
// barMountZ = INITIAL_BAR_LENGTH * StepsPermm;
offsetX = GRIPPER_OFFSET * StepsPermm;
offsetY = -GRIPPER_LENGTH * StepsPermm;
offsetZ = LEVER_S5 * StepsPermm;
offsetX = 0;
offsetY = 0;
offsetZ = 0;
//calculate X/Y/Z offset caused by rotation of servos 3 and 4
alpha3 = Servo3New - 90;
alpha4 = Servo4New - 90;
tempZ = offsetZ * cos(alpha4 * PI / 180.0) - offsetY * sin(alpha4 * PI / 180.0);
tempY = offsetY * cos(alpha4 * PI / 180.0) + offsetZ * sin(alpha4 * PI / 180.0);
offsetY = tempY;
tempX = offsetX * cos(alpha3 * PI / 180.0) - offsetY * sin(alpha3 * PI / 180.0);
tempY = offsetY * cos(alpha3 * PI / 180.0) + offsetX * sin(alpha3 * PI / 180.0);
tempX -= GRIPPER_OFFSET * StepsPermm;
tempY += GRIPPER_LENGTH * StepsPermm;
tempY = -tempY;
tempZ -= LEVER_S5 * StepsPermm;
offsetX = X + tempX;
offsetY = Y + tempY;
offsetZ = Z + tempZ;
if(offsetY != 0){
alpha = atan((double)(barMountZ - offsetZ) / (double)(offsetY)) * 180.0 / PI;
}
if(offsetX != 0){
beta = atan((double)((barMountZ - offsetZ) / offsetX)) * 180.0 / PI;
}
*/
alpha = atan(Y/(INITIAL_BAR_LENGTH * StepsPermm - Z))*180 / PI;
beta = atan(X/(INITIAL_BAR_LENGTH * StepsPermm - Z))*180 / PI;
AngleP1New = round(alpha * STEPS_PER_ANGLE);
AngleP2New = round(beta * STEPS_PER_ANGLE);
M1MountX = X + RADIUS_CORD_MOUNT * StepsPermm * cos(30.0 * PI / 180.0) * cos(alpha) * cos(beta);
M1MountY = Y - RADIUS_CORD_MOUNT * StepsPermm * sin(30.0 * PI / 180.0) * cos(alpha) * cos(beta);
M1MountZ = Z - RADIUS_CORD_MOUNT * StepsPermm * sin(30.0 * PI / 180.0) * sin(alpha) * sin(beta);;
M2MountX = X;
M2MountY = Y + cos(alpha) * RADIUS_CORD_MOUNT * StepsPermm;
M2MountZ = Z + sin(alpha) * RADIUS_CORD_MOUNT * StepsPermm;
M3MountX = X - RADIUS_CORD_MOUNT * StepsPermm * cos(30.0 * PI / 180.0) * cos(alpha) * cos(beta);
M3MountY = Y - RADIUS_CORD_MOUNT * StepsPermm * sin(30.0 * PI / 180.0) * cos(alpha) * cos(beta);
M3MountZ = Z - RADIUS_CORD_MOUNT * StepsPermm * sin(30.0 * PI / 180.0) * sin(alpha) * sin(beta);;
length1New = labs(sqrt(pow(M1X - M1MountX, 2.0) + pow(M1Y - M1MountY, 2.0) + pow(M1Z - M1MountZ, 2.0)));
length2New = labs(sqrt(pow(M2X - M2MountX, 2.0) + pow(M2Y - M2MountY, 2.0) + pow(M2Z - M2MountZ, 2.0)));
length3New = labs(sqrt(pow(M3X - M3MountX, 2.0) + pow(M3Y - M3MountY, 2.0) + pow(M3Z - M3MountZ, 2.0)));
length1New = labs(sqrt(pow(M1X - X, 2.0) + pow(M1Y - Y, 2.0) + pow(M1Z - Z, 2.0)));
length2New = labs(sqrt(pow(M2X - X, 2.0) + pow(M2Y - Y, 2.0) + pow(M2Z - Z, 2.0)));
length3New = labs(sqrt(pow(M3X - X, 2.0) + pow(M3Y - Y, 2.0) + pow(M3Z - Z, 2.0)));
stepDiff = abs(length1New - length1);
if(abs(length2New - length2) > stepDiff){
stepDiff = abs(length2New - length2);
}
if(abs(length3New - length3) > stepDiff){
stepDiff = abs(length3New - length3);
}
if(abs(AngleP1New - AngleP1) > stepDiff){
stepDiff = abs(AngleP1New - AngleP1);
}
if(abs(AngleP2New - AngleP2) > stepDiff){
stepDiff = abs(AngleP2New - AngleP2);
}
if(abs(Servo3New - Servo3) > stepDiff){
stepDiff = abs(Servo3New - Servo3);
}
if(abs(Servo4New - Servo4) > stepDiff){
stepDiff = abs(Servo4New - Servo4);
}
if(abs(Servo5New - Servo5) > stepDiff){
stepDiff = abs(Servo5New - Servo5);
}
printf("length1New - length1 = %lf, length2New - length2 = %lf, length3New - length3 = %lf\n", length1New - length1, length2New - length2, length3New - length3);
gettimeofday(&tv,NULL);
uTimeStart = 1000000 * tv.tv_sec + tv.tv_usec;
longTemp = uTimeStart / 100000000;
uTimeStart -= longTemp * 100000000;
uTimeDiff = 0;
if(abs(length1New - length1)!=0){
uDiffM1 = stepDiff*STEP_PAUSE / abs(length1New - length1);
}
else{
uDiffM1 = stepDiff*STEP_PAUSE +1000;
}
if(abs(length2New - length2)!=0){
uDiffM2 = stepDiff*STEP_PAUSE / abs(length2New - length2);
}
else{
uDiffM2 = stepDiff*STEP_PAUSE +1000;
}
if(abs(length3New - length3)!=0){
uDiffM3 = stepDiff*STEP_PAUSE / abs(length3New - length3);
}
else{
uDiffM3 = stepDiff*STEP_PAUSE +1000;
}
if(abs(AngleP1New - AngleP1)!=0){
uDiffP1 = stepDiff*STEP_PAUSE / abs(AngleP1New - AngleP1);
}
else{
uDiffP1 = stepDiff*STEP_PAUSE +1000;
}
if(abs(AngleP2New - AngleP2)!=0){
uDiffP2 = stepDiff*STEP_PAUSE / abs(AngleP2New - AngleP2);
}
else{
uDiffP2 = stepDiff*STEP_PAUSE +1000;
}
if(abs(Servo3New - Servo3)!=0){
uDiffS3 = stepDiff*STEP_PAUSE / abs(Servo3New - Servo3);
}
else{
uDiffS3 = stepDiff*STEP_PAUSE +1000;
}
if(abs(Servo4New - Servo4)!=0){
uDiffS4 = stepDiff*STEP_PAUSE / abs(Servo4New - Servo4);
}
else{
uDiffS4 = stepDiff*STEP_PAUSE +1000;
}
if(abs(Servo5New - Servo5)!=0){
uDiffS5 = stepDiff*STEP_PAUSE / abs(Servo5New - Servo5);
}
else{
uDiffS5 = stepDiff*STEP_PAUSE +1000;
}
uNowM1 = 0;
uNowM2 = 0;
uNowM3 = 0;
uNowP1 = 0;
uNowP2 = 0;
uNowS3 = 0;
uNowS4 = 0;
uNowS5 = 0;
while(uTimeDiff < stepDiff*STEP_PAUSE){
gettimeofday(&tv,NULL);
uTimeNow = 1000000 * tv.tv_sec + tv.tv_usec;
longTemp = uTimeNow / 100000000;
uTimeNow -= longTemp * 100000000;
if(uTimeNow < uTimeStart){//Movement no longer than 100s to avoid overflow!
uTimeNow += 100000000;
}
uTimeDiff = uTimeNow-uTimeStart;
if(uTimeDiff - uNowM1 >= uDiffM1){
if(length1New > length1){
motor1(1, 0);
}
if(length1New < length1){
motor1(-1, 0);
}
uNowM1+=uDiffM1;
}
if(uTimeDiff - uNowM2 >= uDiffM2){
if(length2New > length2){
motor2(1, 0);
}
if(length2New < length2){
motor2(-1, 0);
}
uNowM2+=uDiffM2;
}
if(uTimeDiff - uNowM3 >= uDiffM3){
if(length3New > length3){
motor3(1, 0);
}
if(length3New < length3){
motor3(-1, 0);
}
uNowM3+=uDiffM3;
}
if(uTimeDiff - uNowP1 >= uDiffP1){
if(AngleP1New > AngleP1){
motorP1(1, 0);
}
if(AngleP1New < AngleP1){
motorP1(-1, 0);
}
uNowP1+=uDiffP1;
}
if(uTimeDiff - uNowP2 >= uDiffP2){
if(AngleP2New > AngleP2){
motorP2(1, 0);
}
if(AngleP2New < AngleP2){
motorP2(-1, 0);
}
uNowP2+=uDiffP2;
}
if(uTimeDiff - uNowS3 >= uDiffS3){
if(Servo3New > Servo3){
moveServo3(1);
}
if(Servo3New < Servo3){
moveServo3(-1);
}
uNowS3+=uDiffS3;
}
if(uTimeDiff - uNowS4 >= uDiffS4){
if(Servo4New > Servo4){
moveServo4(1);
}
if(Servo4New < Servo4){
moveServo4(-1);
}
uNowS4+=uDiffS4;
}
if(uTimeDiff - uNowS5 >= uDiffS5){
if(Servo5New > Servo5){
moveServo5(1);
}
if(Servo5New < Servo5){
moveServo5(-1);
}
uNowS5+=uDiffS5;
}
}
while(length1New > length1){
motor1(1, STEP_PAUSE);
printf("length1New=%lf, length1=%lf\n", length1New, length1);
}
while(length1New < length1){
motor1(-1, STEP_PAUSE);
printf("length1New=%lf, length1=%lf\n", length1New, length1);
}
while(length2New > length2){
motor2(1, STEP_PAUSE);
printf("length2New=%lf, length2=%lf\n", length2New, length2);
}
while(length2New < length2){
motor2(-1, STEP_PAUSE);
printf("length2New=%lf, length2=%lf\n", length2New, length2);
}
while(length3New > length3){
motor3(1, STEP_PAUSE);
printf("length3New=%lf, length3=%lf\n", length3New, length3);
}
while(length3New < length3){
motor3(-1, STEP_PAUSE);
printf("length3New=%lf, length3=%lf\n", length3New, length3);
}
while(AngleP1New>AngleP1){
motorP1(1, P_PAUSE);
printf("AngleP1New=%lf, AngleP1=%lf\n", AngleP1New, AngleP1);
}
while(AngleP1New<AngleP1){
motorP1(-1, P_PAUSE);
printf("AngleP1New=%lf, AngleP1=%lf\n", AngleP1New, AngleP1);
}
while(AngleP2New>AngleP2){
motorP2(1, P_PAUSE);
printf("AngleP2New=%lf, AngleP2=%lf\n", AngleP2New, AngleP2);
}
while(AngleP2New<AngleP2){
motorP2(-1, P_PAUSE);
printf("AngleP2New=%lf, AngleP2=%lf\n", AngleP2New, AngleP2);
}
while(Servo3New>Servo3){
moveServo3(1);
printf("ServoNew3=%d, Servo3=%d\n", Servo3New, Servo3);
}
while(Servo3New<Servo3){
moveServo3(-1);
printf("ServoNew3=%d, Servo3=%d\n", Servo3New, Servo3);
}
while(Servo4New>Servo4){
moveServo4(1);
printf("ServoNew4=%d, Servo4=%d\n", Servo4New, Servo4);
}
while(Servo4New<Servo4){
moveServo4(-1);
printf("ServoNew4=%d, Servo4=%d\n", Servo4New, Servo4);
}
while(Servo5New>Servo5){
moveServo5(1);
printf("ServoNew5=%d, Servo5=%d\n", Servo5New, Servo5);
}
while(Servo5New<Servo5){
moveServo5(-1);
printf("ServoNew5=%d, Servo5=%d\n", Servo5New, Servo5);
}
currentX = X;
currentY = Y;
currentZ = Z;
return 0;
}
//-------------------------------------- MoveToCoordinates -----------------------------------------------
//######################################################################
//################## Main ##############################################
//######################################################################
int main(int argc, char **argv){
long i;
long stepNumber = 0;
FILE *commandsFile;
FILE *ReplayFile;
char commandsLine[1000];
char TextLine[1000];
char *pEnd;
int stopPlot = 0;
int coordReadNo = 0;
long goToX, goToY, goToZ, goToS3, goToS4, goToS5;
long sleepTime;
int gripperOld = 90;
if (wiringPiSetup () == -1){
printf("Could not run wiringPiSetup!");
exit(1);
}
if (gpioInitialise() < 0){
printf("Could not run gpioInitialise!");
exit(1);
}
gpioSetSignalFunc(SIGINT, stop);
pinMode (M1_DIR, OUTPUT);
pinMode (M1_STEP, OUTPUT);
pinMode (M2_DIR, OUTPUT);
pinMode (M2_STEP, OUTPUT);
pinMode (M3_DIR, OUTPUT);
pinMode (M3_STEP, OUTPUT);
pinMode (ENABLE_MOTORS, OUTPUT);
digitalWrite(ENABLE_MOTORS, 1);
pinMode (MOTOR_P1_A, OUTPUT);
pinMode (MOTOR_P1_B, OUTPUT);
pinMode (MOTOR_P1_C, OUTPUT);
pinMode (MOTOR_P1_D, OUTPUT);
pinMode (MOTOR_P2_A, OUTPUT);
pinMode (MOTOR_P2_B, OUTPUT);
pinMode (MOTOR_P2_C, OUTPUT);
pinMode (MOTOR_P2_D, OUTPUT);
pinMode (FLASHLIGHT_1, OUTPUT);
pinMode (FLASHLIGHT_2, OUTPUT);
pinMode (FLASHLIGHT_3, OUTPUT);
gpioServo(SERVO_3, (Servo3 + SERVO_3_OFFSET) * 1000 / 90 + 500);
gpioServo(SERVO_4, (Servo4 + SERVO_4_OFFSET) * 1000 / 90 + 500);
gpioServo(SERVO_5, (Servo5 + SERVO_5_OFFSET) * 1000 / 90 + 500);
/*
gpioServo(SERVO_5, Servo5 * 1000 / 90 + 500);
sleep(3);
gpioServo(SERVO_5, 45 * 1000 / 90 + 500);
sleep(3);
gpioServo(SERVO_5, 135 * 1000 / 90 + 500);
sleep(3);
digitalWrite(ENABLE_MOTORS, 0); gpioTerminate(); exit(0);//!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
*/
//Calculate XYZ coordinates of motors
M1X = -BASELENGTH / 2.0;
M1Y = BASELENGTH / 2.0 * tan(30.0 * PI / 180.0);
M2X = 0.0;
M2Y = -(BASELENGTH * cos(30.0 * PI / 180.0) - M1Y);
M3X = BASELENGTH / 2.0;
M3Y = BASELENGTH / 2.0 * tan(30.0 * PI / 180.0);
M2Z = sqrt(pow(INITIAL_LENGTH, 2.0) - pow(M2Y + RADIUS_CORD_MOUNT, 2.0));
M1Z = M2Z;
M3Z = M2Z;
M1X = M1X * StepsPermm;
M1Y = M1Y * StepsPermm;
M1Z = M1Z * StepsPermm;
M2X = M2X * StepsPermm;
M2Y = M2Y * StepsPermm;
M2Z = M2Z * StepsPermm;
M3X = M3X * StepsPermm;
M3Y = M3Y * StepsPermm;
M3Z = M3Z * StepsPermm;
printf("\n\nKoordinates in steps:\n");
printf("M1X = %lf, M1Y = %lf, M1Z = %lf\n", M1X, M1Y, M1Z);
printf("M2X = %lf, M2Y = %lf, M2Z = %lf\n", M2X, M2Y, M2Z);
printf("M3X = %lf, M3Y = %lf, M3Z = %lf\n", M3X, M3Y, M3Z);
length1 = labs(INITIAL_LENGTH * StepsPermm);
length2 = labs(INITIAL_LENGTH * StepsPermm);
length3 = labs(INITIAL_LENGTH * StepsPermm);
// Simple calculation
length1 = labs(sqrt(pow(M1X, 2.0) + pow(M1Y, 2.0) + pow(M1Z, 2.0)));
length2 = labs(sqrt(pow(M2X, 2.0) + pow(M2Y, 2.0) + pow(M2Z, 2.0)));
length3 = labs(sqrt(pow(M3X, 2.0) + pow(M3Y, 2.0) + pow(M3Z, 2.0)));
printf("length1 = %lf, length2 = %lf, length3 = %lf\n", length1, length2, length3);
/*
motor1(1000);
motor1(-1000);
sleep(3);
motor2(1000);
motor2(-1000);
sleep(3);
motor3(1000);
motor3(-1000);
sleep(3);
*/
// MoveToCoordinates(10000, 0, 0, Servo3, Servo4,Servo5);
// sleep(3);
// MoveToCoordinates(0, 0, 0, Servo3, Servo4,Servo5);
// sleep(3);
// digitalWrite(ENABLE_MOTORS, 0); gpioTerminate(); exit(0);//!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!
printf("Moving P1 20\n");
for(i=0;i<20;i++){
motorP1(1, P_PAUSE);
usleep(20000);
}
printf("...done!\n");
sleep(2);
printf("Moving P1 -20\n");
for(i=0;i<20;i++){
motorP1(-1, P_PAUSE);
usleep(20000);
}
printf("...done!\n");
printf("Moving P2 20\n");
for(i=0;i<20;i++){
motorP2(1, P_PAUSE);
usleep(20000);
}
printf("...done!\n");
sleep(2);
printf("Moving P2 -20\n");
for(i=0;i<20;i++){
motorP2(-1, P_PAUSE);
usleep(20000);
}
printf("...done!\n");
while(run){
if(access("WinchBotCommands.txt", W_OK) != -1) {
//sleep(1);
if (!(commandsFile = fopen("WinchBotCommands.txt", "r"))){
printf("Can't open WinchBotCommands.txt!\n");
run = 0;
}
else{
char a = 0;
i = 0;
commandsLine[0] = '\0';
while((!(feof(commandsFile))) && a != 13 && i < 1000){
fread(&a, 1, 1, commandsFile);
commandsLine[i] = a;
commandsLine[i+1] = '\0';
i++;
//printf("'%c'", a);
}
printf("commandsLine='%s'\n", commandsLine);
//Store current coordinates in file
if(strstr(commandsLine, "STORE")!=NULL){
sprintf(TextLine, "echo \"% 7ld, % 7ld, % 7ld, % 7d, % 7d, % 7d, 0;\" >> coordinates.bot", currentX, currentY, currentZ, Servo3, Servo4, Servo5);
system(TextLine);
}
//Store current coordinates in file
if(strstr(commandsLine, "DELETEALL")!=NULL){
system("rm coordinates.bot");
}
//Go to initial position
if(strstr(commandsLine, "INIT")!=NULL){
MoveToCoordinates(0, 0, 0, 90, 90, 90, 0);
}
//Replay file
if(strstr(commandsLine, "REPLAY")!=NULL){
if((ReplayFile=fopen("coordinates.bot","rb"))!=NULL){
printf("Replaying coordinates.bot\n");
//PlotStartTime = time(0);
//coordinateCount = 0;
stopPlot = 0;
coordReadNo = 0;
while(!(feof(ReplayFile)) && stopPlot == 0){
fread(&a, 1, 1, ReplayFile);
printf("%c", a);
i=0;
TextLine[0] = '\0';
while(!(feof(ReplayFile)) && a !=' ' && a != ';' && a != '\"' && a != ',' && a != 10 && a!= 13){
TextLine[i] = a;
TextLine[i+1] = '\0';
i++;
fread(&a, 1, 1, ReplayFile);
printf("%c", a);
}
if(a == '#'){
while(!(feof(ReplayFile)) && a != 10 && a!= 13){
fread(&a, 1, 1, ReplayFile);
printf("%c", a);
}
}
if(a == ',' || a == ';'){//Coordinates found
coordReadNo++;
if(coordReadNo == 1){
goToX = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 2){
goToY = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 3){
goToZ = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 4){
goToS3 = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 5){
goToS4 = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 6){
goToS5 = strtol(TextLine, &pEnd, 10);
}
if(coordReadNo == 7){
...
This file has been truncated, please download it to see its full contents.




{kind=link}
Comments