


Hardware components | ||||||
 |
| × | 2 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
This 3D printed light switch controller will fit on top of your lightswitch and can automatically flick the switch on and off! I've set it up with a microphone to make a DIY 'clapper' light, but it could also be controlled remotely or hooked up to a home automation system.
You can see the design, building and testing of the project in this video I made: https://www.youtube.com/watch?v=RklHrckwbXo
For 3D prints, circuit diagrams, code, bill of materials and lessons learned, you can go here: http://hartleyhacks.com/making/retrofit-light-switch-v2-a-success/
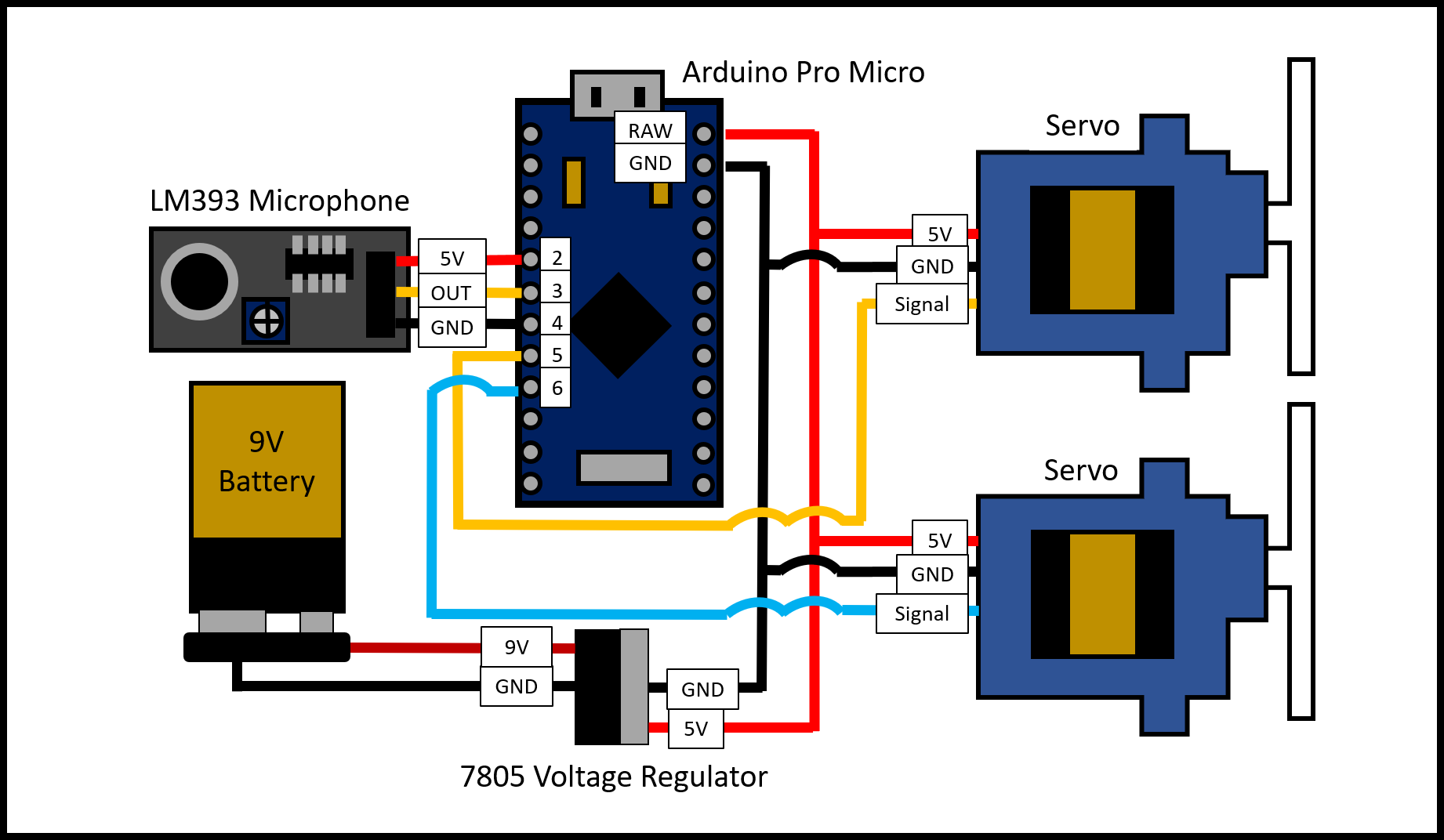
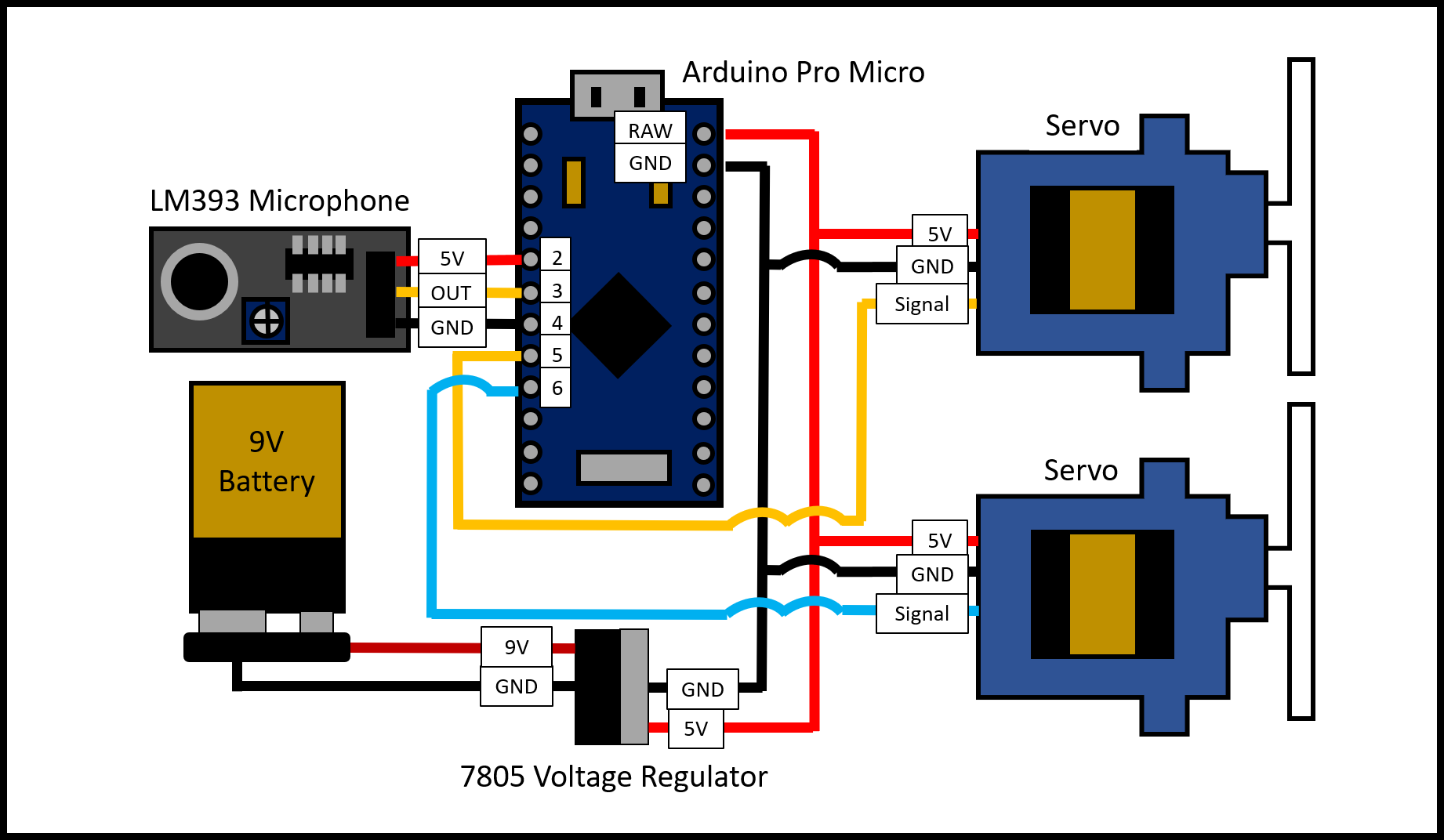
It uses two servos to do the mechanical movement and a Pro Micro (Arduino Compatible) as the brains. As it has its own battery, it's completely stand-alone.
DetailsThis project is based around two servos, held above the light switch with 3D prints I designed. The 3D prints actually use the screws that come with the lightswitch so you simply bolt it on top of the existing switch.
The 'brains' is an Arduino-compatible Pro Micro which controls the servos. It's powered by a 9V battery and uses a 5V voltage regulator to reduce the voltage to the correct level.
I was so pleased with this project I created my first project video for it:
One thing I found quite funny is that the sensitivity of the microphone (which triggers the switch on/off) can be so low that it basically triggers all the time. That's what happened in this video below... DIY strobe party!
I wrote up the lessons learned from the project and included circuit diagrams, code, bill of materials and 3D print files. Feel free to check it out: http://hartleyhacks.com/making/retrofit-light-switch-v2-a-success/
If you have any questions about this project I'd be delighted to answer them - it's quite quick to make, cheap and fun - what's not to like :D
FilesLight Switch Prints.zip: STL files for 3D printing









{kind=link}
Comments