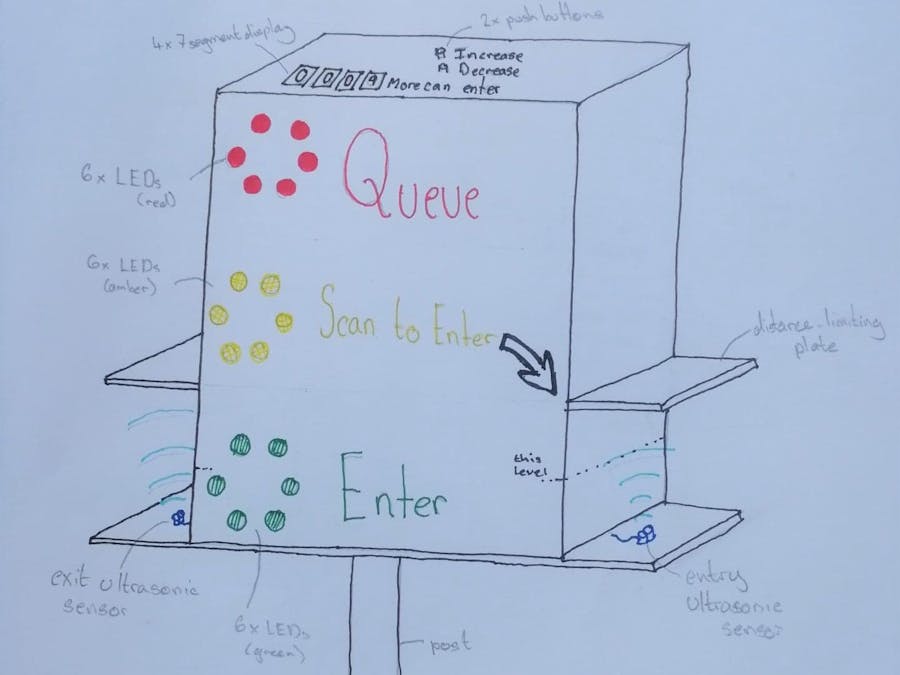
//Shop Door Traffic Light
//Rev.1: H.Anderson-Chapman 09/06/2020
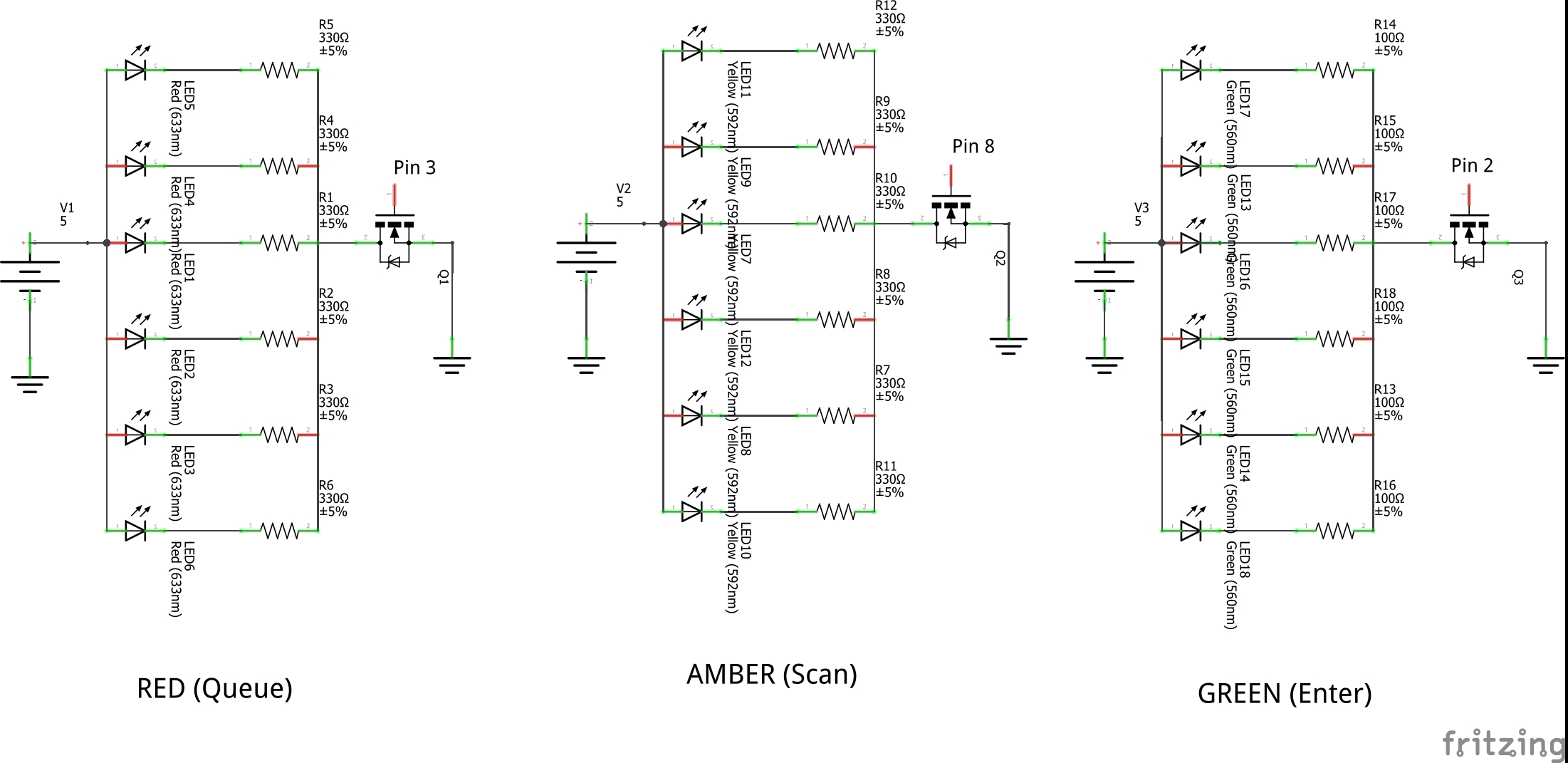
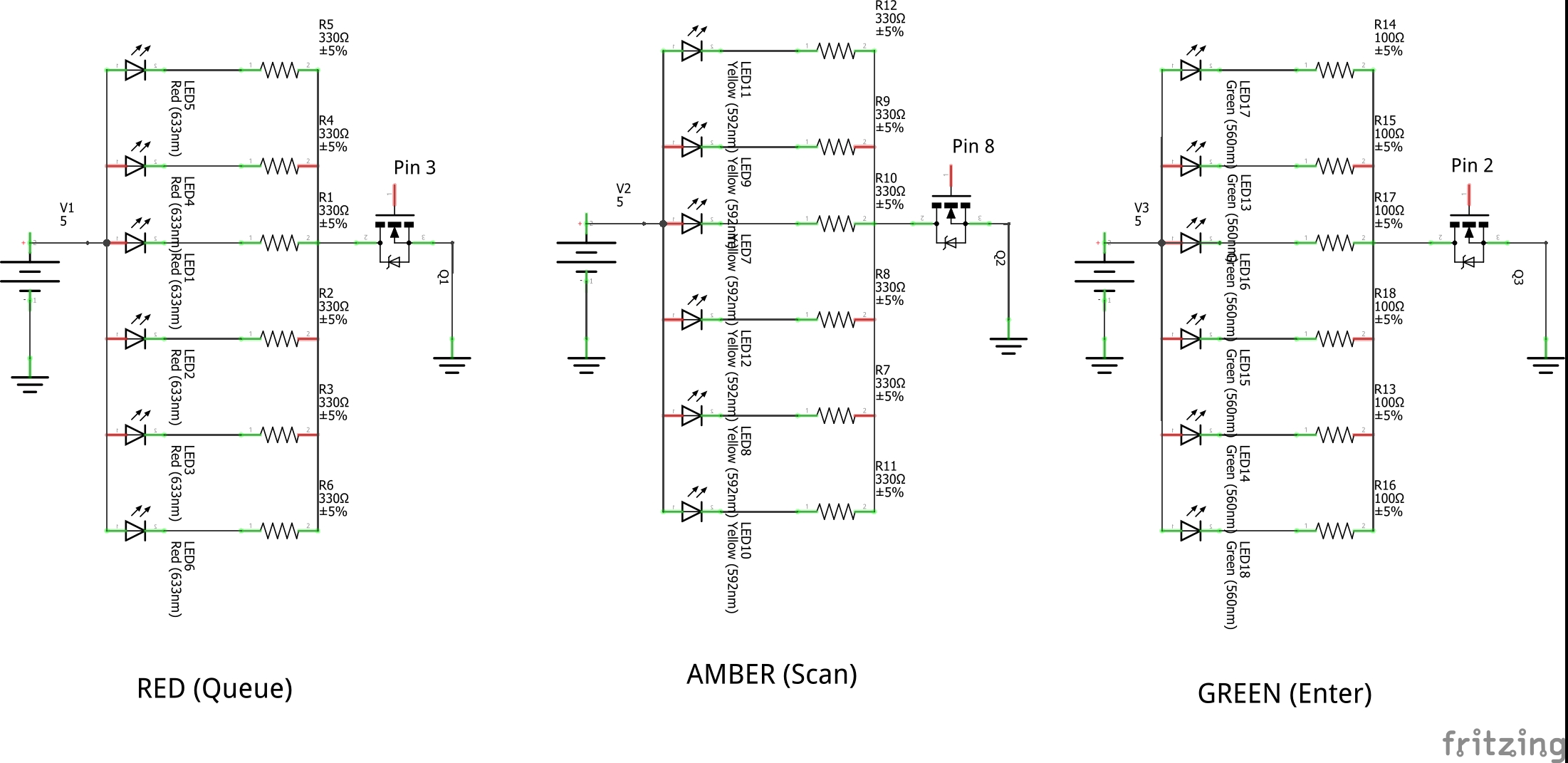
//LED sign pins
int redLedPin = 3;
int amberLedPin = 8;
int greenLedPin = 2;
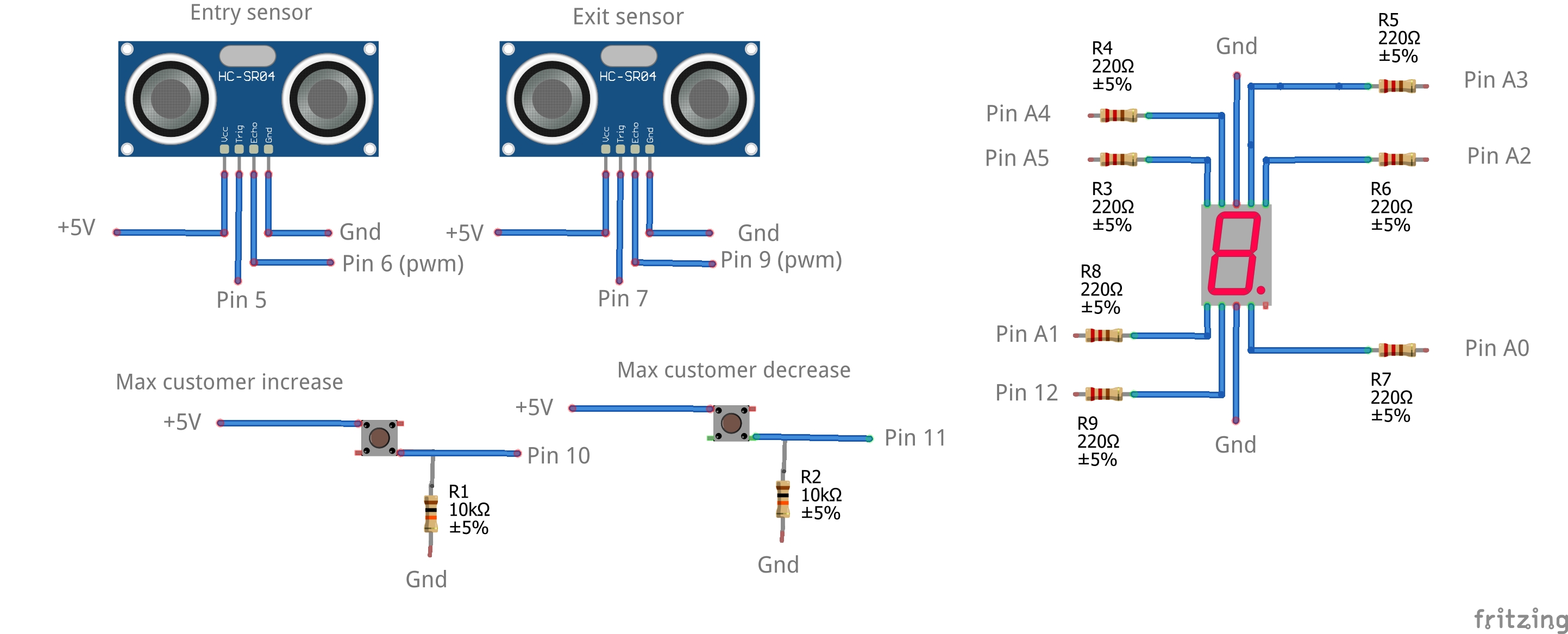
//Entry ultrasonic sensor Pins
int entryPinOut = 5;
int entryPinIn = 6;
//Exit ultrasonic sensor Pins
int exitPinOut = 7;
int exitPinIn = 9;
//Seven segment display pins
int GPin = A5;
int FPin = A4;
int EPin = A1;
int DPin = 12;
int CPin = A0;
int BPin = A2;
int APin = A3;
//Button pins
int buttonUpPin = 10;
int buttonDownPin = 11;
//Initialising variables
int personCount = 0;
int maxPersonCount = 0;
void setup() {
// put your setup code here, to run once:
//Setting the sign LED pins
pinMode(redLedPin, OUTPUT);
pinMode(amberLedPin, OUTPUT);
pinMode(greenLedPin, OUTPUT);
//Setting the entry ultrasonic sesnor pins
pinMode(entryPinOut, OUTPUT);
pinMode(entryPinIn, INPUT);
//Setting the exit ultrasonic sesnor pins
pinMode(exitPinOut, OUTPUT);
pinMode(exitPinIn, INPUT);
//Setting seven segment display pins
pinMode(GPin, OUTPUT);
pinMode(FPin, OUTPUT);
pinMode(EPin, OUTPUT);
pinMode(DPin, OUTPUT);
pinMode(CPin, OUTPUT);
pinMode(BPin, OUTPUT);
pinMode(APin, OUTPUT);
//Setting button pins
pinMode(buttonUpPin, INPUT);
pinMode(buttonDownPin, INPUT);
//Observe with terminal while in testing
Serial.begin(9600);
}
void loop() {
//variables to be used
long entryDuration, entryCm, exitDuration, exitCm;
//Any distance under this value (cm) is a confirmed scan
int sensorLimit = 15;
//Writing the final digit of remaining spaces to the 7-segment display
segmentNumber((maxPersonCount - personCount) % 10);
//taking readings for the buttons
bool upButton = digitalRead(buttonUpPin);
bool downButton = digitalRead(buttonDownPin);
//If the increase button has been pressed, increase the person count
if (upButton) {
maxPersonCount++;
Serial.println("Max person increased to:");
Serial.println(maxPersonCount);
delay(500);
}
//If the decrease button has been pressed, decrease the person count if possible
else if (downButton & maxPersonCount > 0) {
maxPersonCount--;
Serial.println("Max person decreased to:");
Serial.println(maxPersonCount);
delay(500);
}
//If current customer count is greater or equal to max allowance, show the red sign.
if (personCount >= maxPersonCount) {
digitalWrite(redLedPin, HIGH);
Serial.println("Red, wait for person to leave");
}
//Otherwise show the amber sign and detect for an entry
else {
digitalWrite(amberLedPin, HIGH);
//Taking a distance sensor reading
digitalWrite(entryPinOut, HIGH);
delayMicroseconds(2);
digitalWrite(entryPinOut, LOW);
delayMicroseconds(10);
entryDuration = pulseIn(entryPinIn, HIGH);
//Converting to cm
entryCm = entryDuration / 29 / 2;
Serial.println("Entry Sensor:");
Serial.println(entryCm);
//If the distance is below the sensorLimit and there is space, the green light will turn on
if (entryCm <= sensorLimit & personCount < maxPersonCount) {
digitalWrite(amberLedPin, LOW);
digitalWrite(greenLedPin, HIGH);
personCount++; //Noting the entry of a person
Serial.println("Green, enter, person count:");
Serial.println(personCount);
delay(3000);
}
}
//If a person can leave, detect for one
if (personCount > 0) {
//Taking a distance sensor reading for exiting sensors
digitalWrite(exitPinOut, HIGH);
delayMicroseconds(2);
digitalWrite(exitPinOut, LOW);
delayMicroseconds(10);
exitDuration = pulseIn(exitPinIn, HIGH);
//Converting to cm
exitCm = exitDuration / 29 / 2;
Serial.println("Exit Sensor:");
Serial.println(exitCm);
if (exitCm <= sensorLimit) {
personCount--;
//Putting all lights on to indicate the departure has been read.
digitalWrite(amberLedPin, HIGH);
digitalWrite(greenLedPin, HIGH);
digitalWrite(redLedPin, HIGH);
Serial.println("Person left the room, person Count:");
Serial.println(personCount);
delay(3000);
}
}
//resetting the lights
digitalWrite(amberLedPin, LOW);
digitalWrite(greenLedPin, LOW);
digitalWrite(redLedPin, LOW);
}
//A function to convert the number to display into the right 7-segment outputs.
void segmentNumber(int desiredNumber) {
digitalWrite(APin, LOW);
digitalWrite(FPin, LOW);
digitalWrite(GPin, LOW);
digitalWrite(CPin, LOW);
digitalWrite(DPin, LOW);
digitalWrite(EPin, LOW);
digitalWrite(BPin, LOW);
switch (desiredNumber) {
case 0:
digitalWrite(APin, HIGH);
digitalWrite(BPin, HIGH);
digitalWrite(CPin, HIGH);
digitalWrite(EPin, HIGH);
digitalWrite(DPin, HIGH);
digitalWrite(FPin, HIGH);
break;
case 1:
digitalWrite(BPin, HIGH);
digitalWrite(CPin, HIGH);
break;
case 2:
digitalWrite(APin, HIGH);
digitalWrite(BPin, HIGH);
digitalWrite(GPin, HIGH);
digitalWrite(EPin, HIGH);
digitalWrite(DPin, HIGH);
break;
case 3:
digitalWrite(APin, HIGH);
digitalWrite(BPin, HIGH);
digitalWrite(CPin, HIGH);
digitalWrite(GPin, HIGH);
digitalWrite(DPin, HIGH);
break;
case 4:
digitalWrite(FPin, HIGH);
digitalWrite(BPin, HIGH);
digitalWrite(GPin, HIGH);
digitalWrite(CPin, HIGH);
break;
case 5:
digitalWrite(APin, HIGH);
digitalWrite(FPin, HIGH);
digitalWrite(GPin, HIGH);
digitalWrite(CPin, HIGH);
digitalWrite(DPin, HIGH);
Serial.println("5");
break;
case 6:
digitalWrite(APin, HIGH);
digitalWrite(FPin, HIGH);
digitalWrite(GPin, HIGH);
digitalWrite(CPin, HIGH);
digitalWrite(DPin, HIGH);
digitalWrite(EPin, HIGH);
break;
case 7:
digitalWrite(BPin, HIGH);
digitalWrite(CPin, HIGH);
digitalWrite(APin, HIGH);
break;
case 8:
digitalWrite(APin, HIGH);
digitalWrite(FPin, HIGH);
digitalWrite(GPin, HIGH);
digitalWrite(CPin, HIGH);
digitalWrite(DPin, HIGH);
digitalWrite(EPin, HIGH);
digitalWrite(BPin, HIGH);
break;
case 9:
digitalWrite(FPin, HIGH);
digitalWrite(BPin, HIGH);
digitalWrite(GPin, HIGH);
digitalWrite(CPin, HIGH);
digitalWrite(APin, HIGH);
break;
//Default shows 0, for when a negative value shows, no one can enter.
default:
digitalWrite(APin, HIGH);
digitalWrite(BPin, HIGH);
digitalWrite(CPin, HIGH);
digitalWrite(EPin, HIGH);
digitalWrite(DPin, HIGH);
digitalWrite(FPin, HIGH);
}
return;
}




















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments