


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Self-balancing robots represent one of the most fundamental and widely studied applications in control systems, robotics, and embedded engineering. Similar to an inverted pendulum system, a self-balancing robot continuously adjusts its wheel movement to maintain an upright position while compensating for disturbances and changes in its center of gravity.
Traditional balancing robots typically rely on Proportional-Integral-Derivative (PID) controllers to maintain stability. While PID control is simple and effective, achieving optimal performance often requires extensive manual tuning and may not adapt well to varying operating conditions. Recent advancements in Artificial Intelligence (AI) and intelligent control techniques have enabled the enhancement of conventional PID controllers, improving stability, responsiveness, and adaptability.
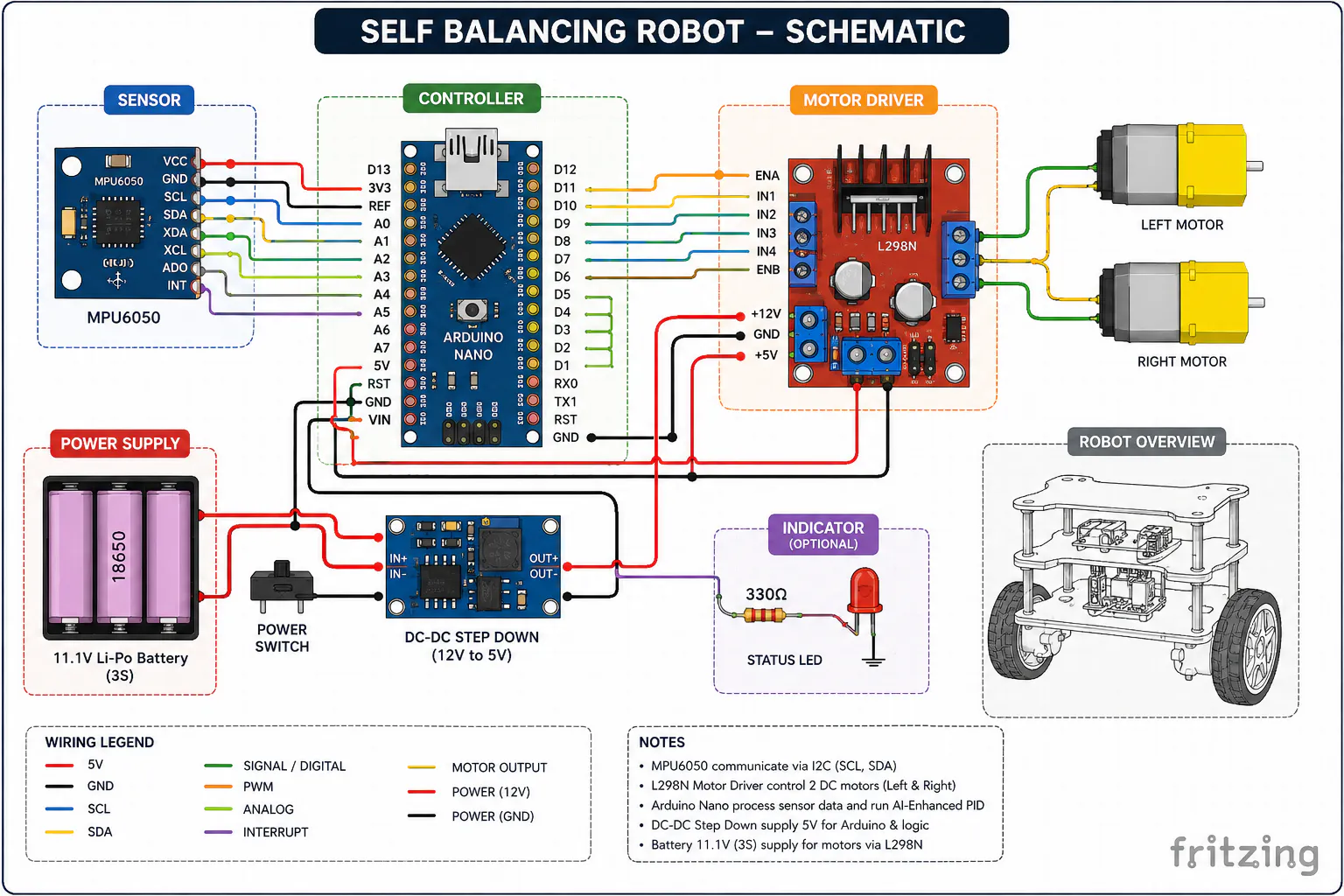
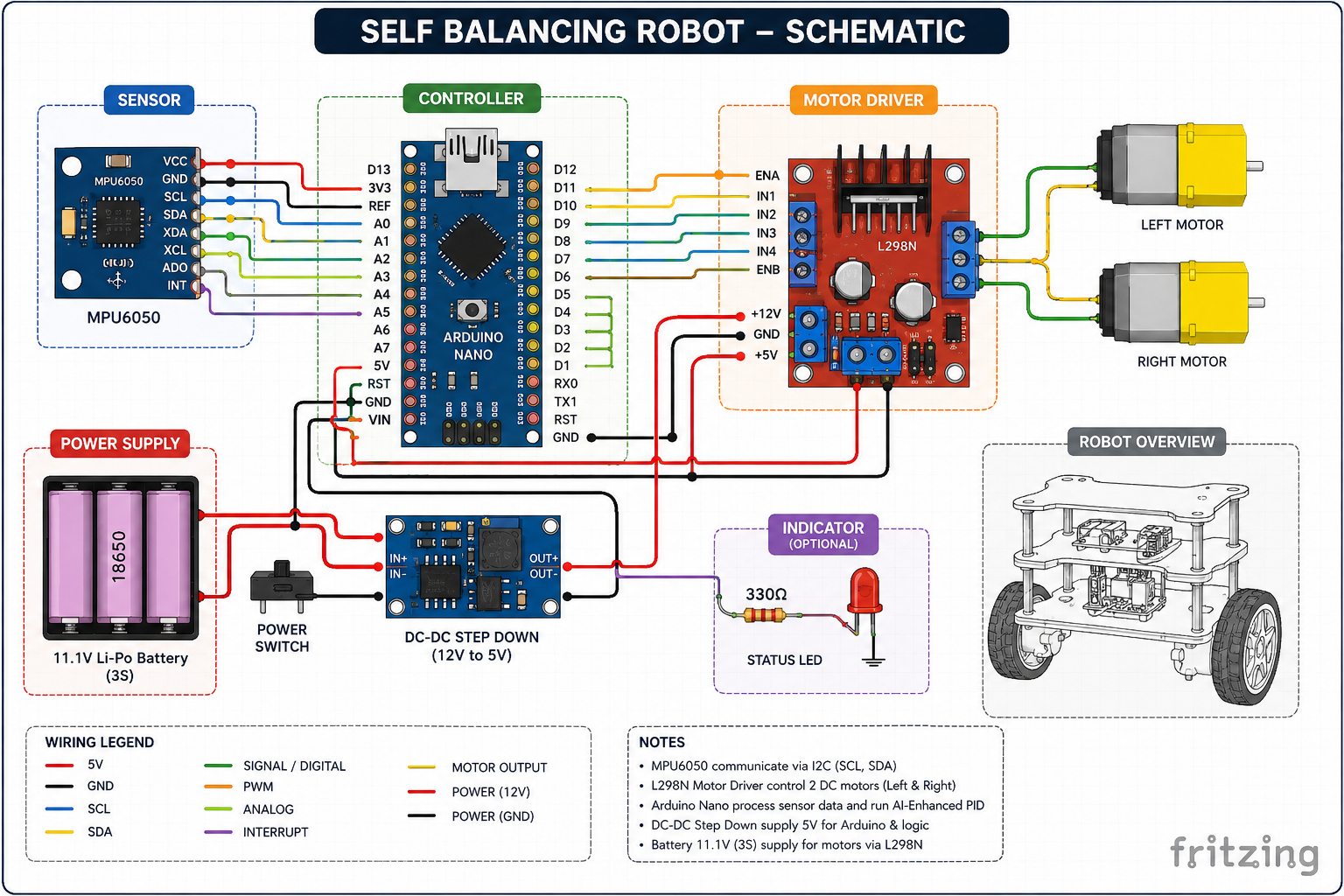
This project presents a compact two-wheeled self-balancing robot featuring a custom-designed 3D-printed chassis, an MPU6050 inertial measurement unit (IMU), and an AI-Enhanced PID control strategy. The robot serves as a practical platform for studying robotics, embedded systems, sensor fusion, and intelligent control algorithms.
Problem StatementMaintaining balance in a two-wheeled robot presents several engineering challenges:
- The robot is inherently unstable due to its inverted pendulum structure.
- Small disturbances can rapidly cause the robot to fall if corrective actions are not applied quickly.
- Sensor measurements often contain noise and drift, affecting angle estimation accuracy.
- Conventional PID controllers require manual tuning that may not be optimal under all operating conditions.
- Variations in battery voltage, payload distribution, and surface conditions can degrade control performance.
These challenges necessitate the development of a robust and intelligent control system capable of maintaining stability under dynamic conditions.
Project ObjectivesThe primary objective of this project is to design and implement a self-balancing robot capable of maintaining upright stability using AI-enhanced control techniques.
Specific objectives include:
- Design a lightweight and rigid robotic chassis using 3D printing technology.
- Develop a real-time balance control system based on MPU6050 sensor feedback.
- Implement sensor fusion techniques to estimate robot inclination accurately.
- Develop an AI-Enhanced PID controller for improved stability and response.
- Evaluate balancing performance under various operating conditions.
- Create an educational and research platform for robotics and control engineering.
The robot consists of several integrated subsystems:
Mechanical System- Custom 3D-printed PLA chassis
- Two-wheel differential drive configuration
- Compact multi-level structural design
- Lightweight construction for improved maneuverability
- MPU6050 IMU sensor
- 3-axis accelerometer
- 3-axis gyroscope
- Real-time tilt angle measurement
- AI-Enhanced PID controller
- Continuous error monitoring
- Adaptive control parameter adjustment
- Real-time stabilization algorithm
- DC geared motors
- Motor driver interface
- Differential wheel control
- Dynamic speed compensation
The balancing process follows the steps below:
- Read acceleration and angular velocity data from the MPU6050.
- Estimate robot tilt angle using sensor fusion algorithms.
- Calculate the balance error relative to the upright position.
- Process the error through the AI-Enhanced PID controller.
- Generate corrective motor commands.
- Adjust wheel speed and direction to restore balance.
- Repeat the control loop continuously in real time.
This closed-loop control architecture enables the robot to maintain stability despite external disturbances.
Key SpecificationsParameter
Specification
Robot Type
Two-Wheel Self-Balancing Robot
Sensor
MPU6050 (3-Axis Gyroscope + Accelerometer)
Control Method
AI-Enhanced PID
Chassis Material
3D Printed PLA
Dimensions
218 × 65 × 152 mm
Manufacturing Method
Additive Manufacturing (3D Printing)
- Demonstrates fundamental control system concepts.
- Provides hands-on experience with embedded systems.
- Serves as a practical platform for robotics education.
- Introduces students to sensor fusion and intelligent control.
- Supports experimentation with advanced control algorithms.
- Enables comparison between conventional PID and AI-assisted control.
- Provides a test platform for machine learning applications in robotics.
- Facilitates research in autonomous balancing systems.
- Improves understanding of real-time control systems.
- Demonstrates rapid prototyping using 3D printing technology.
- Validates AI integration in embedded robotics applications.
- Develops skills in system integration and mechatronics.
- Real-time self-balancing capability
- AI-Enhanced PID control
- MPU6050-based motion sensing
- Compact and lightweight design
- Fully 3D-printed chassis
- Fast response to disturbances
- Modular electronics architecture
- Low-cost educational platform
- Expandable for autonomous navigation and obstacle avoidance
The expected outcome of this project is a stable and responsive self-balancing robot capable of maintaining upright equilibrium through intelligent closed-loop control. The system demonstrates the integration of mechanical design, embedded electronics, sensor fusion, and AI-enhanced control strategies, making it a valuable platform for education, research, and advanced robotics development.




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments