#include <Wire.h>
#include "nunchuck_funcs.h"
#include <Adafruit_NeoPixel.h>
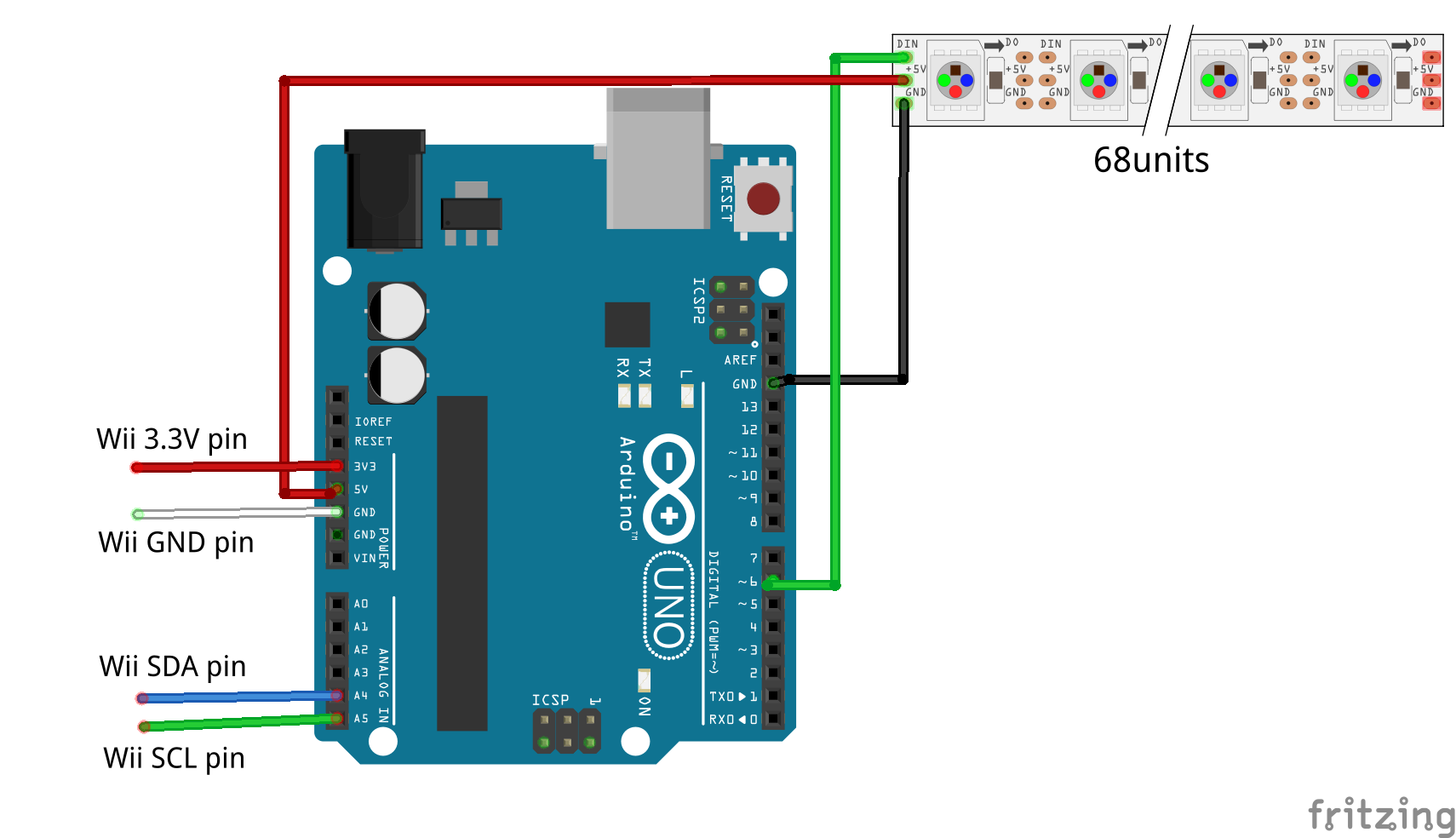
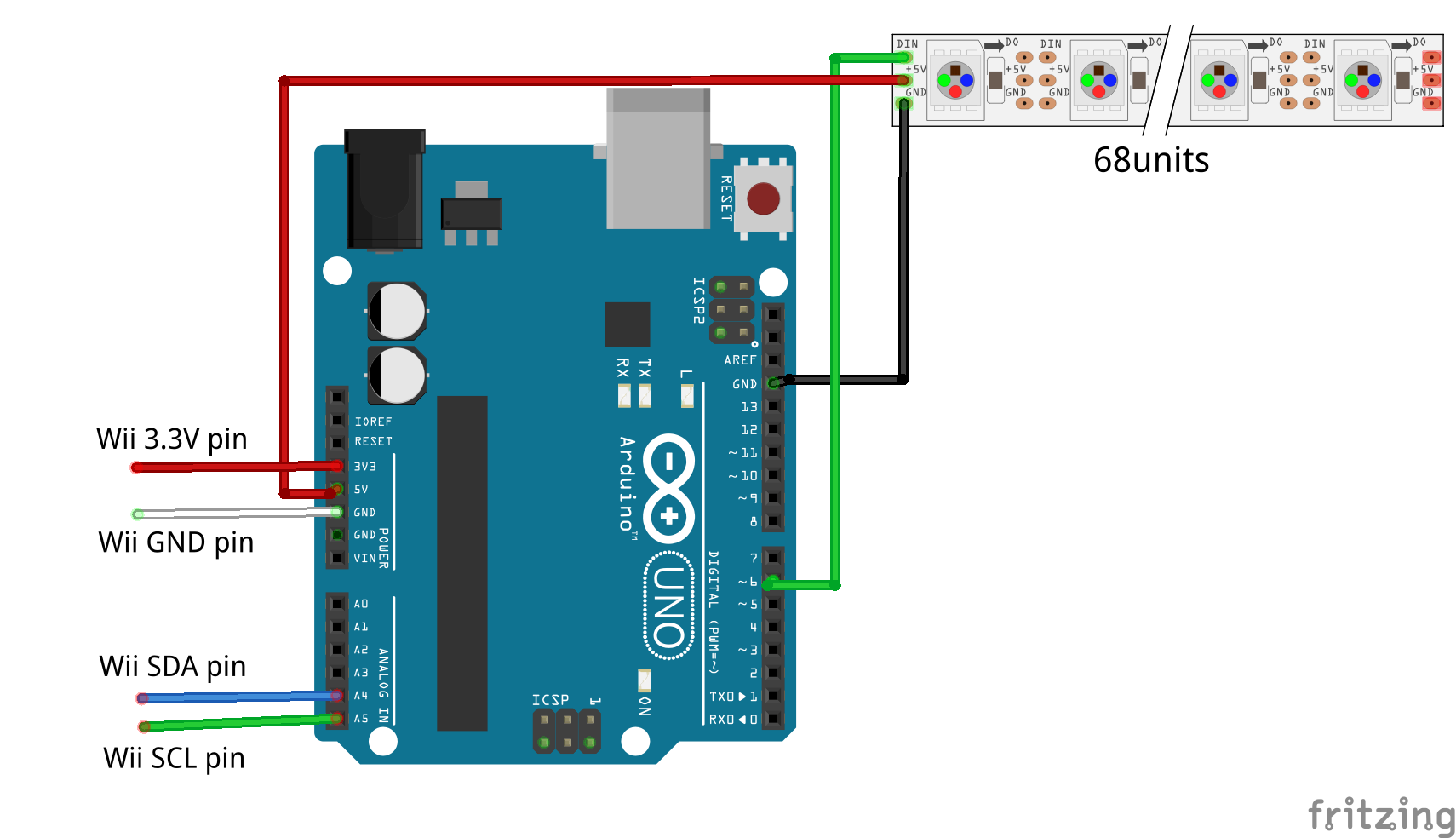
#define PIN 6
Adafruit_NeoPixel led = Adafruit_NeoPixel(68, PIN, NEO_GRB + NEO_KHZ800);
int blackNum = 24;
int pupilNum = 12;
uint32_t color;
int brightness = 40;
byte eyeColor;
int LR =0;
//Black eye L&R animation
int blackLED[15][24] = {{12,32,35,55,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{12,13,31,36,54,55,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{11,13,14,30,37,53,54,56,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{10,11,14,15,29,38,52,53,56,57,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{ 9,10,11,12,15,16,28,33,34,39,51,52,55,56,57,58,68,68,68,68,68,68,68,68},
{ 0, 8, 9,10,11,12,13,16,17,27,32,35,40,50,51,54,55,56,57,58,59,67,68,68},
{ 0, 1, 7, 8, 9,10,13,14,17,18,26,31,36,41,49,50,53,54,57,58,59,60,66,67},
{ 1, 2, 6, 7, 8, 9,14,15,18,19,25,30,37,42,48,49,52,53,58,59,60,61,65,66},
{ 2, 3, 5, 6, 7, 8,15,16,19,20,24,29,38,43,47,48,51,52,59,60,61,62,64,65},
{ 3, 4, 5, 6, 7,16,17,20,21,23,28,39,44,46,47,50,51,60,61,62,63,64,68,68},
{ 4, 5, 6,17,18,21,22,27,40,45,46,49,50,61,62,63,68,68,68,68,68,68,68,68},
{ 4, 5,18,19,26,41,48,49,62,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{ 4,19,20,25,42,47,48,63,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{20,21,24,43,46,47,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{21,23,44,46,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68}};
//pupil L&R animation
int pupilLED[15][12] = {{33,34,68,68,68,68,68,68,68,68,68,68},
{32,33,34,35,68,68,68,68,68,68,68,68},
{12,31,32,33,34,35,36,55,68,68,68,68},
{12,13,30,31,32,33,34,35,36,37,54,55},
{13,14,29,30,31,32,35,36,37,38,53,54},
{14,15,28,29,30,31,36,37,38,39,52,53},
{15,16,27,28,29,30,37,38,39,40,51,52},
{16,17,26,27,28,29,38,39,40,41,50,51},
{17,18,25,26,27,28,39,40,41,42,49,50},
{18,19,24,25,26,27,40,41,42,43,48,49},
{19,20,23,24,25,26,41,42,43,44,47,48},
{20,21,22,23,24,25,42,43,44,45,46,47},
{21,22,23,24,43,44,45,46,68,68,68,68},
{22,23,44,45,68,68,68,68,68,68,68,68},
{22,45,68,68,68,68,68,68,68,68,68,68}};
//Blink animation
int eyelid = 0;
int eyelidNum[8] = {0,4,8,16,24,34,44,56};
int eyelidLED[56] = {64,65,66,67,58,59,60,61,56,57,62,63,49,50,51,52,47,48,53,54,38,39,40,41,46,55,36,37,42,43,26,27,28,29,35,44,24,25,30,31,15,16,17,18,34,45,23,32,13,14,19,20,6,7,8,9};
byte joyx,joyy,zbut,cbut;
void setup() {
Serial.begin(19200);
led.begin();
led.setBrightness(brightness); // Initial Brightness 40
led.show(); // Initialize all pixels to 'off'
color = led.Color(0, 177, 55); //pupil color
nunchuck_init(); // send the initilization handshake
}
uint32_t Wheel(byte WheelPos) {
WheelPos = 255 - WheelPos;
if(WheelPos < 85) {
return led.Color(255 - WheelPos * 3, 0, WheelPos * 3);
}
if(WheelPos < 170) {
WheelPos -= 85;
return led.Color(0, WheelPos * 3, 255 - WheelPos * 3);
}
WheelPos -= 170;
return led.Color(WheelPos * 3, 255 - WheelPos * 3, 0);
}
void blink(int eyelid, int LR) {
if (eyelid != 8){
//White eye
for(uint16_t i=0; i<led.numPixels(); i++) {
led.setPixelColor(i, led.Color(66, 66, 66));
}
//Black eye
for(uint16_t i=0; i<blackNum; i++) {
led.setPixelColor(blackLED[LR][i], color);
}
//pupil
for(uint16_t i=0; i<pupilNum; i++) {
led.setPixelColor(pupilLED[LR][i], led.Color(0, 0, 66));
}
//eyelid
for(int i=0; i < eyelidNum[eyelid]; i++) {
led.setPixelColor(eyelidLED[i], 0);
}
} else if (eyelid == 8){
led.clear();
}
led.show();
}
void loop() {
nunchuck_get_data();
joyx = nunchuck_joyx(); // range 29 - 226
joyy = nunchuck_joyy(); // range 29 - 226
zbut = nunchuck_zbutton();
cbut = nunchuck_cbutton();
/*
Serial.print("joyx: "); Serial.print((byte)joyx,DEC);
Serial.print("\tjoyy: "); Serial.print((byte)joyy,DEC);
Serial.print("\tzbut: "); Serial.print((byte)zbut,DEC);
Serial.print("\tcbut: "); Serial.println((byte)cbut,DEC);
*/
//Change the color of the pupil with the Z button push
if(zbut == 1){
eyeColor++;
if(eyeColor > 255){
eyeColor = 0;
}
delay(10);
color = Wheel(eyeColor);
}
//Blink on the joystick's y axis
eyelid = map(joyy, 29, 130, 8, 0);
if (eyelid > 8) {
eyelid = 8;
}
if (eyelid < 0) {
eyelid = 0;
}
//The pupil moves left and right on the joystick's x axis
LR = map(joyx, 29, 226, 0, 14);
if (LR > 14) {
LR = 14;
}
if (LR < 0) {
LR = 0;
}
blink(eyelid, LR);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)

{kind=link}
Comments