// -------------------------Distance Approximater using Arudino Ultrasonic Sensor and LEDs----------------
// By : Gurneet Singh
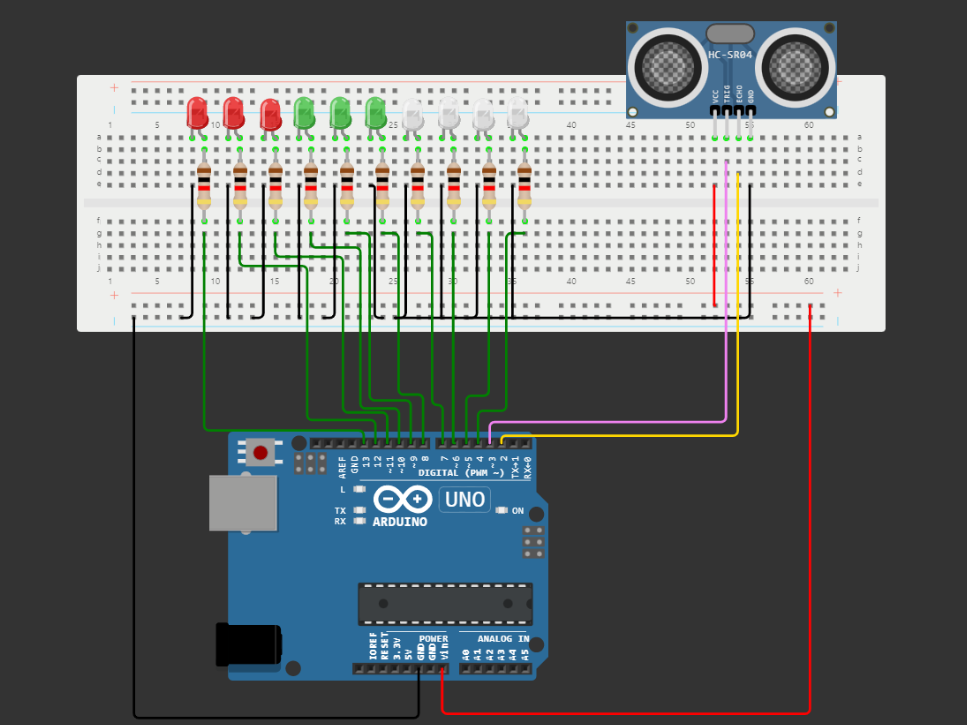
// Materials Used:
// 1. 10 LEDS
// 2. Ultrsonic Sensor
// 3. Resistors
// 4. Jumper Wires and Breadboards
#define echoPin 2 // D2 to Echo
#define trigPin 3 //D3 to trig
int led_pins[] = {13,12,11,10,9,8,7,6,5,4}; // Array of 10Pins as output to LED
int high_pins = 0; // Count of High/On Pins
int low_pins = 10; // Count of Low/Off Pins
long duration; // variable for the duration of sound wave travel
int distance; // variable for the distance measurement
void setup() {
pinMode(trigPin, OUTPUT); // Sets the trigPin as an OUTPUT
pinMode(echoPin, INPUT); // Sets the echoPin as an INPUT
for(int i=0;i<9;i++){
pinMode(led_pins[i],OUTPUT); // Sets all the LED pins as OUTPUT
}
Serial.begin(9600);
Serial.println("Ultrasonic Sensor HC-SR04 and LED Distance Apporximater");
}
void loop() {
digitalWrite(trigPin, LOW);
digitalWrite(trigPin, HIGH);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration * 0.034 / 2; // Distance formula
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
// Below are a lot of IF-ELSE which decide on the basis of the distance, how much LEDs need to glow
if(distance > 0 && distance <= 5){
high_pins = 10;
}
else if(distance <= 9){
high_pins = 9;
}
else if(distance <= 14){
high_pins = 8;
}
else if(distance<=18){
high_pins = 7;
}
else if(distance<=22){
high_pins = 6;
}
else if(distance<=26){
high_pins = 5;
}
else if(distance<=30){
high_pins = 4;
}
else if(distance<=34){
high_pins =3;
}
else if(distance <=38){
high_pins = 2;}
else if(distance <=43){
high_pins = 1;
}
else {
high_pins = 0;
}
for(int i=0;i<=high_pins;i++){
digitalWrite(led_pins[i],HIGH); // Loop to set the led pins to HIGH
}
for(int j=high_pins;j<11;j++){
digitalWrite(led_pins[j],LOW); // Loop to set the led pins to LOW
}
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)











{kind=link}
Comments