


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
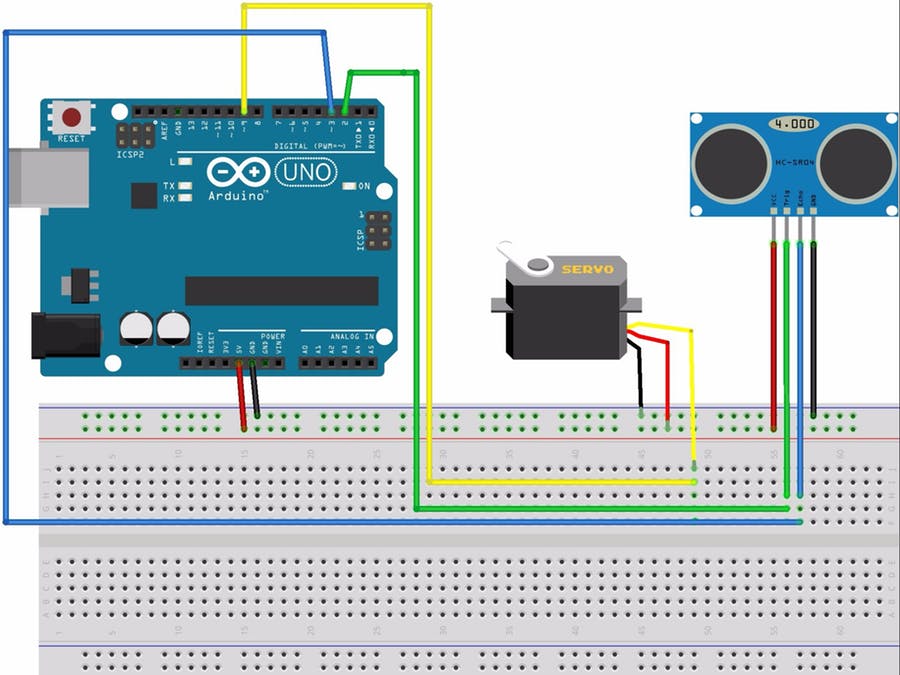
A Object Radar is a device that measures the
distance from the target to the observer, for the purposes of
surveying, determining focus in photography, or accurately aiming
a weapon. In this technical project, we make a simple radar using
the ultrasonic sensor, this radar works by measuring a range from
3cm to 40 cm as non-contact distance, with angle range between
15˚ and 165˚.The movement of the sensor is controlled by using a
small servo motor. Information received from the sensor will be
used by “Processing Development Environment” software to
illustrate the result on a PC screen.
Radar is an object detection
system that uses electromagnetic waves to
recognize the range, elevation, path, or speediness
of both moving and fixed objects such as aircraft,
ships, motor Vehicles, weather formations, and
terrain and when instead of electromagnetic waves,
we use Ultrasonic waves, it is called an ultrasonic
radar. In the moving object required a more no. of
data to tracking its actual setting such as location,
distance, speed. Technologies are used to tracking
system mainly comprise microcontroller 89c51,
ultrasonic module and microwave distance meter.
Distance detector is Device capable to measuring
the distance between transmitter and the receiver.
The techniques to measuring the distance between
using ultrasonic of an object include the pulse echo
method. In that technique burst pulse is send the 40
kHz Signal through transmission medium and is
reflected by an object kept at specific distance from
the ultrasonic module.the time interval between
echoes reflected from object to the module is
proportional to the distance of object. The main
drawback of the ultrasonic module is it is a short
range communication; it fails to measure the long
distance communication. It tracks the object with in
the several range of the module.
The main objective of this project is to secure
the transportation in fog using Robotics. As one of
the trends in the development of automation in
transportation and vehicles in 21st century, has
been researched and developed. Until now the
transportation of vehicles (Trains, Flights) was
totally dependent on weather. In highly foggy
weather it is too difficult to drive trains or board
flights due to low density because driver or pilot
will not be able to detect the object on the track due
to fog. So for increasing the accuracy level
microcontroller based automatic projectile system
is introduced. The basic idea of this automatic
projectile. Current system is capable to detect any
radiation in the range of track. The proposed
system is based on Ultrasonic sensor. The
ultrasonic sensor provides 2cm to 40cm of non
contact measurement functionality with a ranging
accuracy that can reach up to 3mm. Each ultrasonic
module includes a transmitter, a receiver and a
control circuit.
Radar is an object detection system that uses
electromagnetic waves to identify range, altitude,
direction, or speed of both moving and fixed
objects such as aircraft, ships, vehicles, weather
formations, and terrain. When we use ultrasonic
waves instead of electromagnetic waves, we call it
ultrasonic radar. The main components in any
Object radar are the ultrasonic Sensors. Ultrasonic
sensors work on a principle similar to radar or
sonar which evaluates attributes of a target by
interpreting the echoes from radio or sound waves
respectively. Radar’s information will appear in
different ways. Basic and old radar station uses
sound alarm or LED, modern radar uses LCD
display to show detailed information of the
targeted object.
We use Computer screen to show the
information (distance and angle). A method and
system for using one or more radar systems for
object detection based on machine learning in an
environment is disclosed.
A scanning radar or combination of radars
mounted on a vehicle or moving object scans the
environment to acquire information. The radar
data may be a 3D point cloud, 2D radar image or
3D radar image. The radar data may also be
combined with data from LIDAR, vision or both.
A machine learning algorithm is then applied to
the acquired data to detect dynamic or static
objects within the environment, and identify at
least one object feature comprising one of a type,
location, distance, orientation, size or speed of an
object.


{kind=link}
Comments