

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
| ||||||
| ||||||
| ||||||
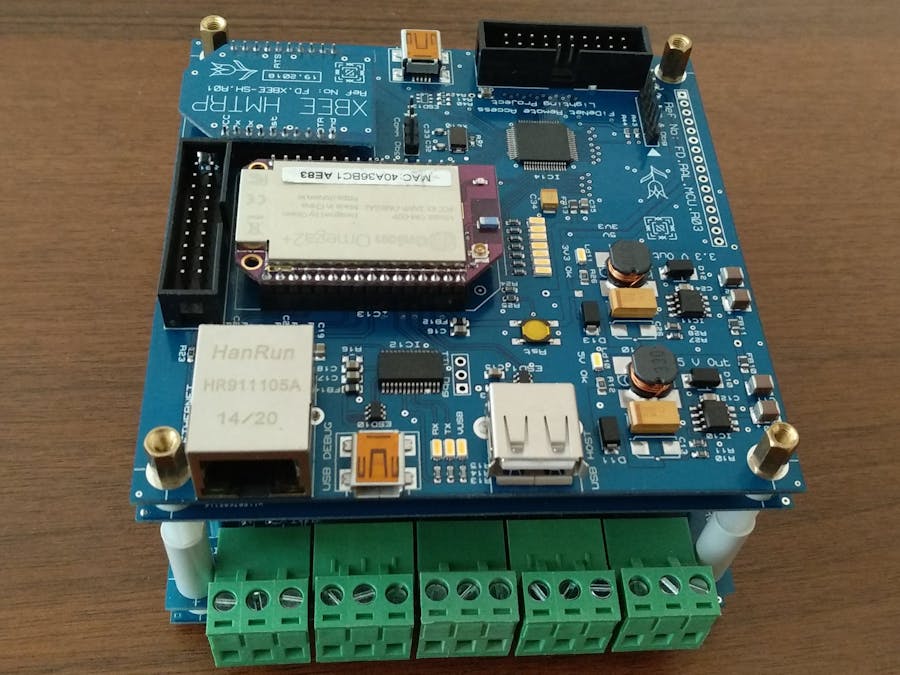
I like develop codes with Python to run on mobile devices except cell phones. Omega is ideal choice for mobile project. But it has few GPIO and limited ports such as UART, SPI, I2C.
I added a PIC24F MCU and connected lots of devices to it. The MCU communicates Omega2 by UART.
The development board has:
- I2C EEPROM and DS1307 clock.
- XBee shield support. I used HMTRP RF chip with XBee shield.
- 16 GPIO pins to communicate other devies including SPI, UART, I2C, Analog, Interrupt pins are accesible by connector including 5V, 3.3V and Gnd pins.
- 10 of Omega2 GPIO pins is accesible by connector including 5V, 3.3V and Gnd pins.
- 5 PIC24F user LEDS and 4 Omega2 user LEDs (2 LEDs on board, 2 LEDs on Ethernet jack).
PCBWAY has produced all of my PCBs. The PCB quality is excellent!
XBee Shield, SMPS and Relay Board can be ordered on PCBWAY Shared Projects:
XBee Shield PCB: https://www.pcbway.com/project/shareproject/W118076ASJ4_FD_XBEE_SH_R01___CADCAM.html
SMPS Pcb:
https://www.pcbway.com/project/shareproject/W118076ASJ6_FD_SMPS_12V08A___CADCAM.html
Relay Board:
https://www.pcbway.com/project/shareproject/W118076ASJ11_FD_RAL_DRV___CADCAM.html
If you sign in by using this link PCBWAY will give me bonus for new project pcbs and stencils :)
https://www.pcbway.com/setinvite.aspx?inviteid=78068
The project has another PCB including 4 relays, 4 open collector output, 4 opto isolated inputs, 220V AC to 12V DC 0,8A SMPS and LDO.
This project can control:
- 4 devices that work with 110/220 AC
- 4 devices with open collector outputs
and collects data using 4 switches for input.
I added a framework codes for communication pic to omega, pic to xbee shield, pic to dbg port.
And i added codes on omega2+ to communicate with pic and database.
#! /usr/bin/env python
# -*- coding: UTF-8 -*-
#Bismillahirrahmanirrahim
from time import sleep
import onionGpio
import serial
import sqlite3 as db
import os
# define pins
pinLed0=16 # GPIO Led
pinLed1=17 # GPIO Led
pinLed2=18 # GPIO Led
pinLed3=19 # GPIO Led
pinMcuInp=11
# define states
ON=1
OFF=0
line=""
tryOut=30
sayac=0
# tanımlar
dbFile="/home/py/xbee/db/db.sqlite"
# saat ve tarih tanımları
sa=0
dk=0
sn=0
gun=0
ay=0
yil=0
dkEx=0
saEx=0
gunEx=0
ayEx=0
dummyText=""
komut=""
# pin tanımlama ve konfigürasyonu
led0= onionGpio.OnionGpio(pinLed0)
led1= onionGpio.OnionGpio(pinLed1)
led2= onionGpio.OnionGpio(pinLed2)
led3= onionGpio.OnionGpio(pinLed3)
mcuInp=onionGpio.OnionGpio(pinMcuInp)
# pin direction
led0.setOutputDirection(ON)
led1.setOutputDirection(ON)
led2.setOutputDirection(ON)
led3.setOutputDirection(ON)
mcuInp.setInputDirection() #gsm module açık kapalı bildirimi için giriş olarak ayarlandı
led0.setValue(ON)
led1.setValue(OFF)
led2.setValue(OFF)
led3.setValue(OFF)
#fonksiyonlar
def dbKontrol():
dosyaMevcut=os.path.exists(dbFile)
if not dosyaMevcut:
dbOlustur()
else:
print("db dosyası var.\r\n")
def dbOlustur():
vt=db.connect(dbFile)
im=vt.cursor()
#im.execute("CREATE TABLE arac(id,plate,marka,model,yas,barcode)")
#vt.commit()
im.execute("""
CREATE TABLE action(
'id' INTEGER PRIMARY KEY AUTOINCREMENT,
'longitude' VARCHAR(25),
'longitudeDir' VARCHAR(5),
'latitude' VARCHAR(25),
'latitudeDir' VARCHAR(5),
'rakim' REAL,
'yon' REAL,
'kms' REAL,
'knot' REAL,
'tarih' VARCHAR(10),
'saat' VARCHAR(10)
)""")
#im.execute("CREATE TABLE action(id,enlem,boylam,rakim,yon,hiz,tarih,saat)")
vt.commit()
vt.close()
print("Veritabanı olusturuldu\r\n")
def veriGir(longitude,longitudeDir,latitude,latitudeDir,rakim,yon,kms,knot,gsmTarih,gsmSaat):
with db.connect(dbFile) as vt:
im=vt.cursor()
sorguText="""INSERT INTO
action(longitude,longitudeDir,latitude,latitudeDir,rakim,yon,kms,knot,tarih,saat)
values('{}','{}','{}','{}','{}','{}','{}','{}','{}','{}') """.format(longitude,longitudeDir,latitude,latitudeDir,rakim,yon,kms,knot,gsmTarih,gsmSaat)
#print (sorguText)
im.execute(sorguText)
vt.commit()
print("Veritabanına eklendi")
# bütün seri port yazma işini ve porttan okuma işini bir rutine bağla.
# böylece SMS bildirimlerini burada kaçırmadan kontrol edebilirsin.
def seriPortYaz(veri,bekle=1,bildir=""):
ser.write(veri.encode('utf-8'))
sayac=0
while(ser.in_waiting==0) and (sayac<bekle):
sleep(0.1)
sayac+=1
if bildir!="":
print("SER: {}\r\n".format(bildir))
gsmRespText=ser.read(ser.in_waiting)
print("Ser Read: {}\r\n".format(gsmRespText))
return gsmRespText
#if "+CMTI:" in gsmRespText:
# smsSorgula()
#def smsSorgula():
#-----------------başlıyoruz ------------------
dbKontrol() #veritabanı var kontrol et yoksa oluştur varsa aşağıda bağlan
# terminal seri portu
terminal=serial.Serial()
terminal.baudrate=115200
terminal.port='/dev/ttyS0'
terminal.open()
#sm modül iletişim seri portu
ser=serial.Serial()
ser.baudrate=115200
ser.port='/dev/ttyS1'
ser.open()
sleep(0.1)
sayac=0
while(True):
if(sayac%10==0):
print("sayac: {}\r\n".format(sayac))
sayac+=1
if terminal.in_waiting>0:
terminalRespText=terminal.read(terminal.in_waiting).decode('utf-8')
if "q" in terminalRespText:
break
#led.setValue(OFF)
if ser.in_waiting>2: # eğer veri varsa al ve değerlendir.
#seriporttan veri gelirken kesme oluşmadığı için bekleme yaparak
#veri alınıyor. Bu bekleme esnasında da bazen veri alınırken veri
#ortada kesilebiliyor
#bunun için küçük bir bekleme test rutini ekledim.
bekleyen=ser.in_waiting
sleep(0.1)
if ser.in_waiting != bekleyen:
sleep(0.2)
serData=ser.read(ser.in_waiting).decode('utf-8')
print("Veri: {}".format(serData))
print("------------------------\r\n")
#veri gelince rutin olarak cevap yaz
komut="sayac={}\r".format(sayac) # SMS göndermek için başla
ser.write(komut.encode('utf-8'))
sleep(0.1)
ser.close()
#include <main.h>
#include <def.h>
#include <regs.h>
#include <2465x.c>
#include <ds_1307.c>
//#include <ds18b20.c>
#include <func.c>
#include <stdlib.h>
#include <string.h>
#include <stdio.h>
#int_CNI
void CCNI_Interrupt()
{
if (input(sw1)==0)
{
fprintf(dbg,"sw1 press\r\n");
bekle(tOrta);
}
if (input(sw2)==0)
{
fprintf(dbg,"sw2 press\r\n");
bekle(tOrta);
}
if (input(sw3)==0)
{
fprintf(dbg,"sw3 press\r\n");
bekle(tOrta);
}
if (input(sw4)==0)
{
fprintf(dbg,"sw4 press\r\n");
bekle(tOrta);
}
}
#INT_EXT0
void ext0_isr(void)
{
}
#INT_EXT1
void ext1_isr(void)
{
}
//omega2 communication
#INT_RDA
void rda_isr(void)
{
intRdaState=1;
hiX(ledIntRda);
rdaDataCounter=0;
rdaTempCounter=0;
while(rdaTempCounter<10000)
{
rdaTempCounter++;
if (kbhit(omega))
{
chr=fgetc(omega);
if(chr>32)
{
rdaData[rdaDataCounter]=chr;
rdaDataCounter++;
rdaTempCounter=0;
}
}
}
rdaData[rdaDataCounter]=0;
lox(ledIntRda);
}
//debug communication
#INT_RDA2
void rda2_isr(void)
{
intRda2State=1;
hiX(ledIntRda);
rda2DataCounter=0;
rda2TempCounter=0;
while(rda2TempCounter<10000)
{
rda2TempCounter++;
if (kbhit(dbg))
{
chr=fgetc(dbg);
if(chr>32)
{
rda2Data[rda2DataCounter]=chr;
rda2DataCounter++;
rda2TempCounter=0;
}
}
}
rda2Data[rda2DataCounter]=0;
lox(ledIntRda);
}
//XBee sgield communication
#INT_RDA3
void rda3_isr(void)
{
}
#INT_RDA4
void rda4_isr(void)
{
}
void main()
{
//setup_timer2(TMR_INTERNAL | TMR_DIV_BY_1, 999);
//setup_timer5(TMR_INTERNAL | TMR_DIV_BY_1, 999);
//setup_adc_ports(sAN0 | sAN1 | sAN2 | sAN3 | sAN4 | sAN5 | sAN6, VSS_VDD);
//setup_adc(ADC_CLOCK_DIV_16 | ADC_TAD_MUL_0);
//setup_compare(1, COMPARE_PWM_EDGE | COMPARE_TIMER5 | COMPARE_SYNCHRONIZE | COMPARE_TRIG_SYNC_NONE);
//set_pwm_duty(1, 32768);
//setup_compare(2, COMPARE_PWM_CENTER | COMPARE_TIMER4 | COMPARE_SYNCHRONIZE | COMPARE_TRIG_SYNC_NONE);
//set_compare_time(2, 16384, 49152);
enable_interrupts(INTR_CN_PIN |sw1);
enable_interrupts(INTR_CN_PIN |sw2);
enable_interrupts(INTR_CN_PIN |sw3);
enable_interrupts(INTR_CN_PIN |sw4);
init_ext_eeprom();
bekle(tkisa);
ds1307_init(); // saat init
bekle(tkisa);
//saat ayarlama kısmı
//ds1307_set_time(20,40,30); //Saat ayarla
bekle(tKisa);
//ds1307_set_date(12,1,19,6); //Tarih ayarla dow değeri önemli olmasa da ayrla belki ilerde kullanılır.
bekle(tKisa);
/*
ds1307_get_time(myClock.hrs,myClock.min,myClock.sec);
ds1307_get_date(myClock.day,myClock.month,myClock.year,myClock.dow);
fprintf(dbg," Saat: %u:%u:%u Tarih: %u:%u:%u\r\n"myClock.hrs,myClock.min,myClock.sec,myClock.day,myClock.month,myClock.year);
*/
digOut(rfEnable);
digOut(rfConf);
digOut(iAmAlive);
digOut(ledIntRda);
digOut(ledIntRda2);
digOut(ledIntRda3);
digOut(ledIntCN);
digOut(rl1);
digOut(rl2);
digOut(rl3);
digOut(rl4);
digOut(openCol1);
digOut(openCol2);
digOut(openCol3);
digOut(openCol4);
digIn(sw1);
digIn(sw2);
digIn(sw3);
digIn(sw4);
hmtrp(enable);
bekle(tSn);
//enable_interrupts(INT_EXT0);
enable_interrupts(INT_RDA);
enable_interrupts(INT_CNI);
//enable_interrupts(INT_EXT1);
enable_interrupts(INT_RDA2);
//enable_interrupts(INT_RDA3);
//enable_interrupts(INT_RDA4);
enable_interrupts(INTR_GLOBAL);
fprintf(dbg,"FiDeNet \r\n");
fprintf(omega,"FiDeNet Omega\r\n");
fprintf(rf,"FiDeNet rf\r\n");
/*
//relay test
hiX(rl1);
bekle(tSn);
hiX(rl2);
bekle(tSn);
hiX(rl3);
loX(rl1);
bekle(tSn);
hiX(rl4);
loX(rl2);
bekle(tSn);
loX(rl3);
bekle(tSn);
loX(rl4);
*/
eepromRdTest();
eepromWrTest();
processPlanner=0;
while(TRUE)
{
enable_interrupts(INT_RDA2);
//TODO: User Code
bekle(tMicro);
processPlanner++;
if (processPlanner%1000==0)
{
fprintf(omega,"FiDeNet Omega Test\r\n");
}
if (processPlanner%200==0)
{
hiX(iAmAlive);
}
if (processPlanner%200==100)
{
loX(iAmAlive);
}
//omega uart portuna veri gelince
if (intRdaState==1)
{
fprintf(dbg,"rdaData:%s\r\n"rdaData);
intRdaState=0;
}
//debug uart portuna veri gelince
if (intRda2State==1)
{
fprintf(dbg,"rda2Data:%s\r\n"rda2Data);
intRda2State=0;
}
}
}
/*Cihaz ile ilgili kullanılacak sabitler*/
enum sabitler{
cHWID,
cSWVersion,
cHwR,
mfc, //manifacturer
};
typedef struct hw_strings{
u8 sbt;
char str[20];
}myHwStrings;
myHwStrings const deviceData[10]={
cHWID,{"FD.RAL.MCU.R03"},
cSWVersion,{"1.0.0"},
cHwR,{"1.0.1"},
mfc,{"FiDeNet UKoSis"},
};
enum enumCommands{
cAT,
cATHwID,
cATSw,
cATHwR,
cATMfc, //manifacturer
cATID,
cATIDW,
cATIDC,
};
typedef struct strctCommandText{
u8 sbt;
char str[20];
}myHwCommands;
myHwCommands const MyCommands[15]={
cAT,{"AT\r"},
cATHwID,{"ATHwID\r"},
cATSw,{"ATSw\r"},
cATHwR,{"ATHwR\r"},
cATMfc,{"ATMfc\r"},
cATID,{"ATID\r"},
cATIDW,{"ATIDW="},
cATIDC,{"ATIDC\r"},
};
u16 counterGen; //genel sayaç
u8 resp;
u16 processPlanner;
u8 readDevIDOk=0;
u8 devIDAddr=10;
char devID[30];
//rda rutini değişkenleri
char tempBuffer[30]; // id yazma için kullanılan ara değişken
char chr;
//char rdaBuffer[100];
//char rda2Buffer[100];
u16 rdaTempcounter;
u16 rda2Tempcounter;
u16 rda3Tempcounter;
u8 rdaDataCounter;
u8 rda2DataCounter;
u1 intRdaState=0;
u1 intRda2State=0;
u1 intRda3State=0;
u1 intExtState=0;
u1 intExt1State=0;
char rdaData[100];
char rda2Data[100];
char rda3Data[100];
char strGen1[10];
u16 genCounter;
u8 genCounter2;
//GSM commands and regs
u1 gsmPowerState;
u1 intExtFirst=1;
u8 ringCount;
u16 ringTempCounter;
u8 ringCountMax=2;
u16 diff;
typedef struct timeDef{
u8 sec;
u8 min;
u8 hrs;
u8 day;
u8 month;
u8 year;
u8 dow;
u8 temp;
u16 id;
}myTimeDefs;
myTimeDefs myClock;
typedef int1 u1;
typedef unsigned int8 u8;
typedef volatile unsigned int8 vu8;
typedef unsigned int16 u16;
typedef volatile unsigned int16 vu16;
typedef unsigned int32 u32;
#define bekle(x) delay_ms(x)
#define digOut(x) output_drive(x)
#define digIn(x) output_float(x)
#pin_select U1TX=PIN_D1
#pin_select U1RX=PIN_D2
#use rs232(UART1, baud=115200, stream=omega)
#pin_select U2TX=PIN_B5
#pin_select U2RX=PIN_B4
#use rs232(UART2, baud=115200, stream=dbg)
#pin_select U3TX=PIN_D11
#pin_select U3RX=PIN_D0
#use rs232(UART3, baud=9600, stream=rf)
#define rfConf Pin_D8
#define rfEnable Pin_F3
#define sw1 Pin_E6
#define sw2 Pin_E7
#define sw3 Pin_G6
#define sw4 Pin_G7
#define rl1 Pin_F0
#define rl2 Pin_F1
#define rl3 Pin_E0
#define rl4 Pin_E1
#define openCol1 Pin_E2
#define openCol2 Pin_E3
#define openCol3 Pin_E4
#define openCol4 Pin_E5
//PWM için tanımlama
//#pin_select OC1=PIN_B2
//#pin_select OC2=PIN_B1
#use i2c(MASTER, I2C1, FAST, stream=I2C_PORT1)
#define hiX(x) output_high(x)
#define loX(x) output_low(x)
#define disable 0
#define enable 1
#define debug
#define iAmAlive Pin_D7
#define ledIntRda Pin_D6
#define ledIntRda2 Pin_D5
#define ledIntRda3 Pin_D4
#define ledIntCN Pin_D3
//#define lcdBacklight Pin_B14
#define tSn 1000
#define tUzun 500
#define tOrta 100
#define tKisa 50
#define tMini 10
#define tMicro 1
void hmtrp(u8 state)
{
if (state==disable)
{
hiX(rfEnable);
hiX(rfConf);
}
if(state==enable)
{
loX(rfEnable);
hiX(rfConf);
}
}
u1 readDevId(void)
{
u8 sayac;
char temp;
readDevIDOk=0;
for(sayac=0;sayac<19;sayac++)
{
temp=read_ext_eeprom(sayac + devIDAddr);
if((temp>32)&&(temp<128))
{
devID[sayac]=temp;
readDevIDOk++;
}
else
{
if(sayac>1)
{
devID[sayac]="\0";
}
}
}
devID[sayac]='\0';
if(readDevIDOk>10)
{
//fprintf(comm_dbg,"dev_id=%s\r\n"dev_id);
return 1;
}
else
{
return 0;
}
}
void writeDevId(void)
{
u8 sayac2;
char chr;
u16 addr;
for(sayac2=0;sayac2<20;sayac2++)
{
addr=sayac2+devIDAddr;
chr=devID[sayac2];
write_ext_eeprom(addr,chr);
}
}
void clearDevID()
{
u8 sayac,addr;
char chr;
for(sayac=0;sayac<30;sayac++)
{
addr=sayac+devIDAddr;
write_ext_eeprom(addr,0);
}
}
void eepromWrTest()
{
u8 sayac;
fprintf(dbg,"eeprom Write Test\r\n");
for (sayac=1;sayac<20;sayac++)
{
write_ext_eeprom(sayac,65+sayac);
bekle(tMini);
}
}
void eepromRdTest()
{
u8 sayac;
char okunan[23];
okunan[0]="A";
for (sayac=1;sayac<20;sayac++)
{
okunan[sayac]=read_ext_eeprom(sayac);
bekle(tMini);
}
okunan[sayac]=0;
fprintf(dbg,"EEprom Test: %s\r\n"okunan);
}





Comments