

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
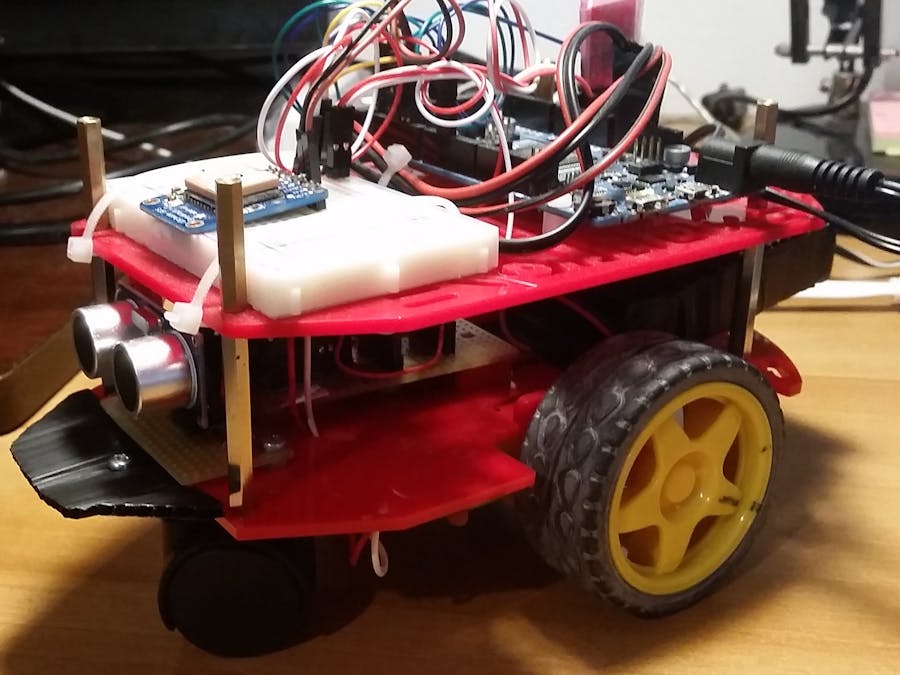
This project aims to create a RC rover, with a GPS tracker controlled through an Android application. The application allows the user to control the direction of the rover and plots the rover location on a standard map. The rover is composed by an Arduino due board, a Olimex Wi-Fi module and a Adafruit ultimate GPS Breakout v3, mounted on a Dagu Robot cart shield.The project has been developed exploiting the ARTe Arduino Real-Time extension from ReTiS Lab, Scuola Superiore Sant'Anna Pisa. ARTe is an extension to the Arduino framework that supports multitasking and real-time preemptive scheduling. Thanks to ARTe, the user can easily specify and run multiple concurrent loops at different rates, in addition to the single execution cycle provided by the standard Arduino framework. ARTe has been developed to support concurrent real-time periodic activities, while maintaining the simplicity of the programming paradigm typical of the Arduino framework. More information about ARTe can be found at ARTe Website or in the Getting Started with ARTe project.
package com.example.myapplication;
import android.Manifest;
import android.content.BroadcastReceiver;
import android.content.Context;
import android.content.Intent;
import android.content.IntentFilter;
import android.content.pm.PackageManager;
import android.graphics.Color;
import android.net.wifi.ScanResult;
import android.net.wifi.WifiConfiguration;
import android.net.wifi.WifiManager;
import android.os.AsyncTask;
import android.support.v4.app.ActivityCompat;
import android.support.v4.app.FragmentActivity;
import android.support.v4.content.ContextCompat;
import android.support.v7.app.AppCompatActivity;
import android.os.Bundle;
import android.util.Log;
import android.view.MotionEvent;
import android.view.View;
import android.widget.ArrayAdapter;
import android.widget.Button;
import android.widget.ListView;
import android.widget.TextView;
import android.widget.Toast;
import com.google.android.gms.maps.CameraUpdateFactory;
import com.google.android.gms.maps.GoogleMap;
import com.google.android.gms.maps.MapFragment;
import com.google.android.gms.maps.OnMapReadyCallback;
import com.google.android.gms.maps.model.LatLng;
import com.google.android.gms.maps.model.MarkerOptions;
import com.google.android.gms.maps.model.Polyline;
import com.google.android.gms.maps.model.PolylineOptions;
import java.io.BufferedWriter;
import java.io.IOException;
import java.io.OutputStreamWriter;
import java.io.PrintWriter;
import java.net.InetAddress;
import java.net.InetSocketAddress;
import java.net.Socket;
import java.net.UnknownHostException;
import java.util.ArrayList;
import java.util.List;
//public class MainActivity extends AppCompatActivity {
public class MainActivity extends FragmentActivity implements OnMapReadyCallback {
final String AccessWifi = Manifest.permission.ACCESS_WIFI_STATE;
final String ChangeWifi = Manifest.permission.CHANGE_WIFI_STATE;
final String CoarseLoc = Manifest.permission.ACCESS_COARSE_LOCATION;
final String FineLoc = Manifest.permission.ACCESS_FINE_LOCATION;
final String ChangeNet = Manifest.permission.CHANGE_NETWORK_STATE;
final String AccessNet = Manifest.permission.ACCESS_NETWORK_STATE;
final String Internet = Manifest.permission.INTERNET;
public static final int ID_PERM=1;
WifiManager wifi;
ListView lv;
int size = 0;
List<ScanResult> results;
ArrayList<String> arraylist = new ArrayList<>();
ArrayAdapter adapter;
public boolean findWifi=true;
public boolean connected=false;
//private static final int SERVERPORT = 333;
//private static final String SERVER_IP = "192.168.4.1";
public TCPClient mTcpClient;
private GoogleMap mMap;
private Polyline polyline;
private PolylineOptions polyline_opt;
private List<LatLng> points;
TextView textState;
TextView textCmd;
Button butLstop;
Button butRstop;
/*
@Override
public void onRequestPermissionsResult(int requestCode, String permissions[], int[] grantResults) {
switch (requestCode) {
case ID_PERM: {
if (grantResults.length > 0 && grantResults[0] == PackageManager.PERMISSION_GRANTED) {
// permission concessa: eseguiamo il codice
} else {
// permission negata: provvediamo in qualche maniera
}
return;
}
}
}
*/
@Override
protected void onCreate(Bundle savedInstanceState) {
super.onCreate(savedInstanceState);
setContentView(R.layout.activity_main);
// Permessi
int permiStateAWifi = ContextCompat.checkSelfPermission(this, AccessWifi);
int permiStateCWifi = ContextCompat.checkSelfPermission(this, ChangeWifi);
int permiStateCLoc = ContextCompat.checkSelfPermission(this, CoarseLoc);
int permiStateFLoc = ContextCompat.checkSelfPermission(this, FineLoc);
int permiStateCNet = ContextCompat.checkSelfPermission(this, ChangeNet);
int permiStateANet = ContextCompat.checkSelfPermission(this, AccessNet);
int permiStateInt = ContextCompat.checkSelfPermission(this, Internet);
if (permiStateAWifi != PackageManager.PERMISSION_GRANTED && permiStateCWifi != PackageManager.PERMISSION_GRANTED &&
permiStateCLoc != PackageManager.PERMISSION_GRANTED && permiStateFLoc != PackageManager.PERMISSION_GRANTED
&& permiStateCNet != PackageManager.PERMISSION_GRANTED && permiStateInt != PackageManager.PERMISSION_GRANTED
&& permiStateANet != PackageManager.PERMISSION_GRANTED) {
ActivityCompat.requestPermissions(this, new String[]{AccessWifi, ChangeWifi, CoarseLoc, FineLoc, ChangeNet,AccessNet, Internet},ID_PERM);
}
/**/
wifi = (WifiManager) getApplicationContext().getSystemService(Context.WIFI_SERVICE);
if (wifi.isWifiEnabled() == false)
{
Toast.makeText(getApplicationContext(), "wifi is disabled..making it enabled", Toast.LENGTH_LONG).show();
wifi.setWifiEnabled(true);
}
IntentFilter intentFilter = new IntentFilter();
intentFilter.addAction(wifi.SCAN_RESULTS_AVAILABLE_ACTION);
getApplicationContext().registerReceiver(wifiScanReceiver, intentFilter);
//scanWifiNetworks();
lv = (ListView)findViewById(R.id.list);
adapter = new ArrayAdapter<String>(this,android.R.layout.simple_list_item_1,arraylist);
lv.setAdapter(adapter);
MapFragment mapFragment = (MapFragment) getFragmentManager().findFragmentById(R.id.map);
mapFragment.getMapAsync(this);
points= new ArrayList<>();
textState= findViewById(R.id.textView2);
textCmd= findViewById(R.id.textView3);
butLstop=findViewById(R.id.button10);
butRstop=findViewById(R.id.button11);
butLstop.setOnTouchListener(new View.OnTouchListener() {
@Override
public boolean onTouch(View v, MotionEvent event) {
if(event.getAction() == MotionEvent.ACTION_DOWN) {
textCmd.setText("L STOP");
if (mTcpClient != null) {
try {
mTcpClient.sendMessage("a");
} catch (IOException e) {
e.printStackTrace();
}
}
} else if (event.getAction() == MotionEvent.ACTION_UP) {
if (textCmd.getText()=="L STOP" && mTcpClient != null) {
try {
mTcpClient.sendMessage("w");
textCmd.setText("Forward");
} catch (IOException e) {
e.printStackTrace();
}
}
}
return true;
}
});
butRstop.setOnTouchListener(new View.OnTouchListener() {
@Override
public boolean onTouch(View v, MotionEvent event) {
if(event.getAction() == MotionEvent.ACTION_DOWN) {
textCmd.setText("R STOP");
if (mTcpClient != null) {
try {
mTcpClient.sendMessage("d");
} catch (IOException e) {
e.printStackTrace();
}
}
} else if (event.getAction() == MotionEvent.ACTION_UP) {
if (textCmd.getText()=="R STOP" && mTcpClient != null) {
try {
mTcpClient.sendMessage("w");
textCmd.setText("Forward");
} catch (IOException e) {
e.printStackTrace();
}
}
}
return true;
}
});
}
@Override
public void onMapReady(GoogleMap googleMap) {
mMap = googleMap;
//polyline_opt = new PolylineOptions().width(5).color(Color.BLUE);
//polyline = mMap.addPolyline(polyline_opt);
}
/*
public void addToMap(View view){
Polyline line = mMap.addPolyline(new PolylineOptions()
.add(new LatLng(41, 9), new LatLng(42, 9))
.width(5)
.color(Color.RED));
}
*/
BroadcastReceiver wifiScanReceiver = new BroadcastReceiver() {
@Override
public void onReceive(Context c, Intent intent) {
boolean success = intent.getBooleanExtra(wifi.EXTRA_RESULTS_UPDATED, false);
if (success && !findWifi) {
scanSuccess();
}
}
};
public void WifiCon (View view){
findWifi=false;
arraylist.clear();
boolean success = wifi.startScan();
if (!success) {
// scan failure handling
Toast.makeText(this, "Scan Failure", Toast.LENGTH_SHORT).show();
}
}
private void scanSuccess() {
results=wifi.getScanResults();
size=results.size();
//Toast.makeText(this, "Scanning.... " + size, Toast.LENGTH_SHORT).show();
for (ScanResult result : results) {
//arraylist.add(result.SSID);
//adapter.notifyDataSetChanged();
if (result.SSID.equals("INO_ESP8266")){
Toast.makeText(this, "Trovato ", Toast.LENGTH_SHORT).show();
setSsidAndPassword(getApplicationContext(),"INO_ESP8266","12345678",wifi);
break;
}
}
//getApplicationContext().unregisterReceiver(wifiScanReceiver);
//lv.setAdapter(adapter);
}
public boolean setSsidAndPassword(Context context, String ssid, String ssidPassword, WifiManager wifi) {
try {
WifiConfiguration conf = new WifiConfiguration();
conf.SSID = "\"" + ssid+ "\"";
//conf.preSharedKey = "\""+ ssidPassword +"\"";
//conf.preSharedKey = null;
conf.allowedKeyManagement.set(WifiConfiguration.KeyMgmt.NONE);
int idNet=wifi.addNetwork(conf);
if (idNet>=0){
findWifi=true;
wifi.disconnect();
wifi.enableNetwork(idNet, true);
wifi.reconnect();
}
return true;
} catch (Exception e) {
e.printStackTrace();
return false;
}
}
public void ArdConDis (View view) throws IOException{
if (!connected) {
arraylist.clear();
adapter.notifyDataSetChanged();
new connectTask().execute("");
connected=true;
} else {
if (mTcpClient != null) {
mTcpClient.stopClient();
textState.setText("Disconnected");
connected=false;
}
}
}
/*
public class connectTask extends AsyncTask<String,Void,TCPClient> {
@Override
protected TCPClient doInBackground(String... message) {
mTcpClient = new TCPClient();
mTcpClient.run();
return null;
}
}
*/
public class connectTask extends AsyncTask<String,String,TCPClient> {
@Override
protected TCPClient doInBackground(String... message) {
//we create a TCPClient object and
mTcpClient = new TCPClient(new TCPClient.OnMessageReceived() {
@Override
//here the messageReceived method is implemented
public void messageReceived(String message) {
//this method calls the onProgressUpdate
publishProgress(message);
}
});
mTcpClient.run();
return null;
}
@Override
protected void onProgressUpdate(String... values) {
super.onProgressUpdate(values);
String strInput;
strInput=values[0];
//in the arrayList we add the messaged received from server
arraylist.add(strInput);
adapter.notifyDataSetChanged();
if (strInput.contains("connected")){
textState.setText("Connected");
} else {
updateLine(strInput);
}
}
}
public void updateLine(String latlon){
int firsindx=latlon.indexOf(':');
int lastindx=latlon.indexOf(',');
float lat = Float.parseFloat(latlon.substring(firsindx+1,lastindx-1));
float lon = Float.parseFloat(latlon.substring(lastindx+1));
LatLng actualLatLon = new LatLng(lat, lon);
points.add(actualLatLon);
polyline_opt = new PolylineOptions().width(10).color(Color.BLUE);
if (points.size()>2) {
polyline_opt.addAll(points);
polyline = mMap.addPolyline(polyline_opt);
}
mMap.moveCamera(CameraUpdateFactory.newLatLngZoom(actualLatLon,17.0f));
}
public void sendLforward(View view) throws IOException {
textCmd.setText("Left forward");
if (mTcpClient != null) {
mTcpClient.sendMessage("q");
Toast.makeText(this, "Send q", Toast.LENGTH_SHORT).show();
}
}
public void sendLback(View view) throws IOException{
textCmd.setText("Left back");
if (mTcpClient != null) {
mTcpClient.sendMessage("z");
Toast.makeText(this, "Send z", Toast.LENGTH_SHORT).show();
}
}
public void sendRforward(View view) throws IOException{
textCmd.setText("Rigth forward");
if (mTcpClient != null) {
mTcpClient.sendMessage("e");
Toast.makeText(this, "Send e", Toast.LENGTH_SHORT).show();
}
}
public void sendRback(View view) throws IOException{
textCmd.setText("Rigth back");
if (mTcpClient != null) {
mTcpClient.sendMessage("c");
Toast.makeText(this, "Send c", Toast.LENGTH_SHORT).show();
}
}
public void sendStop(View view) throws IOException{
textCmd.setText("Rigth back");
if (mTcpClient != null) {
mTcpClient.sendMessage("s");
Toast.makeText(this, "Send s", Toast.LENGTH_SHORT).show();
}
}
public void sendForw(View view) throws IOException{
textCmd.setText("Forward");
if (mTcpClient != null) {
mTcpClient.sendMessage("w");
Toast.makeText(this, "Send w", Toast.LENGTH_SHORT).show();
}
}
public void sendBack(View view) throws IOException{
textCmd.setText("Back");
if (mTcpClient != null) {
mTcpClient.sendMessage("x");
Toast.makeText(this, "Send x", Toast.LENGTH_SHORT).show();
}
}
}
package com.example.myapplication;
import android.provider.ContactsContract;
import android.util.Log;
import java.io.BufferedReader;
import java.io.BufferedWriter;
import java.io.DataInputStream;
import java.io.DataOutputStream;
import java.io.IOException;
import java.io.InputStreamReader;
import java.io.OutputStreamWriter;
import java.io.PrintWriter;
import java.net.InetAddress;
import java.net.InetSocketAddress;
import java.net.Socket;
import java.net.SocketImpl;
import static java.io.DataInputStream.readUTF;
public class TCPClient {
public static final String SERVER_IP = "192.168.4.1"; //"192.168.4.1";
public static final int SERVER_PORT = 333;
public Socket socket;
// while this is true, the client will continue running
private boolean mRun = false;
// sends message received notifications
private OnMessageReceived mMessageListener;
private DataOutputStream DataOut;
private DataInputStream DataIn;
private String msg;
byte[] buf;
private String cmd="";
private boolean sending=false;
/**
* Constructor of the class. OnMessagedReceived listens for the messages received from server
*/
public TCPClient(OnMessageReceived listener) {
mMessageListener = listener;
}
/**
* Sends the message entered by client to the server
*
* @param message text entered by client
*/
public void sendMessage(String message) throws IOException {
cmd=message;
}
/*
public void sendMessage(final String message) {
Runnable runnable = new Runnable() {
@Override
public void run() {
if (DataOut != null && msg==null) {
try {
Log.i("Debug", "Send command");
DataOut.write(message.getBytes(),0,message.length());
DataOut.flush();
//DataOut.close();
} catch (IOException e) {
e.printStackTrace();
}
}
}
};
Thread thread = new Thread(runnable);
thread.start();
}
*/
/**
* Close the connection and release the members
*/
public void stopClient() throws IOException {
Log.i("Debug", "Stop Client");
// send mesage that we are closing the connection
//sendMessage(Constants.CLOSED_CONNECTION + "Kazy");
mRun = false;
if (DataOut != null && socket!=null) {
DataOut.flush();
DataOut.close();
}
if (DataIn != null && socket!=null) {
DataIn.close();
}
socket.close();
mMessageListener = null;
DataIn=null;
DataOut = null;
msg = null;
cmd="";
//socket=null;
}
public void run() {
int nb;
mRun = true;
try {
//here you must put your computer's IP address.
InetAddress serverAddr = InetAddress.getByName(SERVER_IP);
Log.i("Debug", "Connecting...");
// use to send the command to server
//create a socket to make the connection with the server
//socket = new Socket(serverAddr,SERVER_PORT);
//if (socket==null) {
socket = new Socket();
socket.connect(new InetSocketAddress(SERVER_IP, SERVER_PORT), 1000 * 60);
//}
try {
DataOut = new DataOutputStream(socket.getOutputStream());
//receives the message which the server sends back
//mBufferIn = new BufferedReader(new InputStreamReader(socket.getInputStream()));
DataIn = new DataInputStream(socket.getInputStream());
Log.i("Debug", "Connecting OK");
buf= new byte[1024];
Log.i("Debug", "Inside try catch");
//in this while the client listens for the messages sent by the server
while (mRun) {
if (DataOut != null && cmd != "") {
DataOut.write(cmd.getBytes(), 0, cmd.length());
DataOut.flush();
sending=true;
//cmd = "";
Log.i("Debug", "Send cmd: " + cmd);
}
if (!socket.isClosed()) {
nb = DataIn.read(buf);
if (nb != -1) {
msg = new String(buf, 0, nb);
if (sending && msg.contains("ok")){
sending=false;
cmd="";
} else if (!msg.contains("ok")){
mMessageListener.messageReceived(msg);
}
Log.i("Debug", "Recived : " + msg);
msg = null;
}
}
}
//Log.i("Debug", "Received Message:");
} catch (Exception e) {
Log.e("Debug", "Send Error", e);
}finally {
//the socket must be closed. It is not possible to reconnect to this socket
// after it is closed, which means a new socket instance has to be created.
/*
DataOut.flush();
DataOut.close();
DataIn.close();
socket.close();
*/
}
} catch (Exception e) {
Log.e("Debug", "Connecting Error", e);
}
}
//Declare the interface. The method messageReceived(String message) will must be implemented in the MyActivity
//class at on asynckTask doInBackground
public interface OnMessageReceived {
public void messageReceived(String message);
}
}
#include <Ultrasonic.h>
#include <Motor.h>
#include <WiFiESP8266.h>
#include <Adafruit_GPS.h>
// Attach GPS module to Arduino Due Serial2
#define GPSSerial Serial2
#define PMTK_SET_NMEA_UPDATE_1HZ "$PMTK220,1000*1F"
#define PMTK_SET_NMEA_UPDATE_5HZ "$PMTK220,200*2C"
#define PMTK_SET_NMEA_UPDATE_10HZ "$PMTK220,100*2F"
// turn on only the second sentence (GPRMC)
#define PMTK_SET_NMEA_OUTPUT_RMCONLY "$PMTK314,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*29"
// turn on GPRMC and GGA
#define PMTK_SET_NMEA_OUTPUT_RMCGGA "$PMTK314,0,1,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*28"
// turn on ALL THE DATA
#define PMTK_SET_NMEA_OUTPUT_ALLDATA "$PMTK314,1,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0,0,0,0*28"
// turn off output
#define PMTK_SET_NMEA_OUTPUT_OFF "$PMTK314,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0*28"
#define PMTK_Q_RELEASE "$PMTK605*31"
//------------------------------------------------
// Pins connected to Ultrasonic
const int ul_trig = 43;
const int ul_eco = 41;
// Pins connected to H-bridge to drive motors
const int mR_en = 3;
const int mL_en = 2;
const int mR_A = 31;
const int mR_B = 30;
const int mL_A = 33;
const int mL_B = 32;
// Pins connected to Encoder
const int enR_sen = 24;
const int enL_sen = 26;
// Wi-Fi module attached to Arduino Due Serial1
// Netwoek parameters
String Network = "INO_ESP8266";
String Password = "12345678";
String KeyType = "2";
String Channel = "1";
//------------------------------------------------
// Duty Cycle Max and Min used to PWM driving of motors :
const int dc_min = 3000;
const int dc_max = 4096;
// Encoder variables
const int CFL = 20; // Rising for a lap
static unsigned long cL; // Left rising counter
static unsigned long cR; // Right rising counter
static unsigned long turnTimeL; //Time used to control right turn of vehicle
static unsigned long turnTimeR; //Time used to control left turn of vehicle
static unsigned long t; // Arduino time
static float rpsL; // Estimated Left wheel velocity
static float rpsR; // Estimated Right wheel velocity
static int dcL; // Duty cycle used for left wheel when control is active
static int dcR; // Duty cycle used for right wheel when control is active
// Buffer used to store the data recived from Wi-Fi
String Buffer;
// Buffer used to store the data will send by Wi-Fi
String Data;
// Buffer used to store the command recived from Wi-Fi or from PC
String Command;
// Buffer used to store the data recived from GPS
String BufferGPS;
static bool start; // set to true after Wi-Fi module initialization
static bool wifiCon; // set to true after a client is connected to network
static bool okfound; // set to true during Wi-Fi module initialization
static bool readyfound; // set to true during Wi-Fi module initialization
static bool motFon; // set to true when vheicle go forward
static bool motBon; // set to true when vheicle go back
static bool motRotR; // set to true when vheicle turn Left
static bool motRotL; // set to true when vheicle turn Right
static bool controlStartL; // set to true when control of left wheel is enable
static bool controlStartR; // set to true when control of right wheel is enable
static bool GPSstart; // set to true after GPS module initialization
static bool GPSfix; // set to true after reciving a fix from GPS
//------------------------------------------------
// Function used to select the command to execute
void SendCommand(int dc_L, int dc_R) {
static Motor L_motor(mL_en, mL_A, mL_B);
static Motor R_motor(mR_en, mR_A, mR_B);
//Serial.println(Command);
// Motors commands
if (Command == "q") {
// Veicle turn Left
turnTimeR = millis();
controlStartL = false;
controlStartR = true;
motRotR = true;
L_motor.stopMot();
R_motor.stopMot();
delay(1);
//R_motor.forward(dc_R);
R_motor.forward(dc_max); // turn left the vehicle trought right wheel
//L_motor.forward(dc_min); // this line can be commented on
Command = "";
}
else if (Command == "z") {
// Veicle turn Left
controlStartL = false;
controlStartR = false;
L_motor.back(dc_L); // turn left the vehicle trought left wheel
Command = "";
}
else if (Command == "a") {
// Stop Left wheel
controlStartL = false;
controlStartR = false;
L_motor.stopMot();
Command = "";
}
else if (Command == "e") {
// Veicle turn Right
turnTimeL = millis();
controlStartR = false;
controlStartL = true;
motRotL = true;
R_motor.stopMot();
L_motor.stopMot();
delay(1);
//L_motor.forward(dc_L);
L_motor.forward(dc_max); // turn right the vehicle trought left wheel
//R_motor.forward(dc_min); // this line can be commented on
Command = "";
}
else if (Command == "c") {
// Veicle turn Right
controlStartL = false;
controlStartR = false;
R_motor.back(dc_R); // turn right the vehicle trought right wheel
Command = "";
}
else if (Command == "d") {
// Stop Rigth wheel
controlStartL = false;
controlStartR = false;
R_motor.stopMot();
Command = "";
}
else if (Command == "s") {
// Stop vehicle
controlStartL = false;
controlStartR = false;
motFon = false;
motBon = false;
L_motor.stopMot();
R_motor.stopMot();
Command = "";
}
else if (Command == "w") {
// Vehicle Forward
controlStartL = true;
controlStartR = true;
motFon = true;
motBon = false;
L_motor.forward(dc_L);
R_motor.forward(dc_R);
Command = "";
}
else if (Command == "x") {
// Vehicle Back
controlStartL = true;
controlStartR = true;
motBon = true;
motFon = false;
L_motor.back(dc_L);
R_motor.back(dc_R);
Command = "";
}
}
//------------------------------------------------
void setup() {
Serial.begin(115200);
// Serial for wi-fi communaication
Serial1.begin (115200);
// Attach motors pins
analogWriteResolution(12);
pinMode(mL_en, OUTPUT);
pinMode(mR_en, OUTPUT);
pinMode(mL_A, OUTPUT);
pinMode(mL_B, OUTPUT);
pinMode(mR_A, OUTPUT);
pinMode(mR_B, OUTPUT);
// Attach Encoder pins and interrupts
pinMode(enL_sen, INPUT_PULLUP);
pinMode(enR_sen, INPUT_PULLUP);
attachInterrupt(digitalPinToInterrupt(enL_sen), IncLc, RISING);
attachInterrupt(digitalPinToInterrupt(enR_sen), IncRc, RISING);
t = 0;
cL = 0;
cR = 0;
rpsL = 0;
rpsR = 0;
dcL = 0;
dcR = 0;
Buffer = "";
Data = "";
Command = "";
BufferGPS = "";
start = false;
wifiCon = false;
okfound = false;
readyfound = false;
motFon = false;
motBon = false;
controlStartL = false;
controlStartR = false;
motRotR = false;
motRotL = false;
GPSstart = false;
GPSfix = false;
}
//------------------------------------------------
void loop() {
}
// Function attached to interrupt of left wheel
void IncLc()
{
cL++;
}
// Function attached to interrupt of right wheel
void IncRc()
{
cR++;
}
//------------------------------------------------
// TASKS:
// T1: Control left wheel
void loop1(100) {
static int k = 0;
const int Ns = 10; // number of samplings
const int dcMax = 4096;// Max duty cycle
const int dcMin = 1000;// Min duty cycle
const int dcNom = 3600;// Nominal duty cycle
const double v_ref = 1.5;// Velocity of reference
const double KpL = 150;// K proportional
const double KiL = 80;// K integrative
//static int dcL = 0;
static unsigned long tk[Ns]; // Time samples
static unsigned long ckL[Ns]; // Rises detetcted from encoder
static double vL[Ns]; // Velocity
static double eL[Ns]; // Error
static double eiL = 0.0; // Integral of error
static double vsL = 0.0; // Sum of velocity
static double vmL = 0.0; // Mean velocity
static unsigned long cRotL = 0;// Used to control the number of rotation of wheel
static bool firstStartL = true;
static bool rotLstart = false;
static unsigned long AcL; // Rise variation
static unsigned long AcT; // Time variation
//------------------------------------------------
tk[k] = millis();
ckL[k] = cL;
cL = 0;
if (firstStartL) {
vL[0] = 0;
eL[0] = 0;
vmL = 0;
AcT = 0;
AcL = 0;
k = 1;
firstStartL = false;
//controlStartL = true;
}
else {
if (k == 0) {
// Compute changes ad time variation
AcT = tk[k] - tk[Ns - 1];
AcL = ckL[k];
vL[k] = vL[Ns - 1];
vsL = vL[k];
// Compute Error
//eL[k] = v_ref - vL[k];
eL[k] = v_ref - vmL;
// Compute integral of Error
eiL = (eL[k] + eL[Ns - 1]) * (AcT / 2);
}
else {
// Compute changes ad time variation
AcT = tk[k] - tk[k - 1];
AcL = ckL[k];
// Compute velocity of wheels
vL[k] = 50.0 * double(AcL) / double(AcT);
// Compute mean velocity of wheels
vsL += vL[k];
vmL = vsL / double(k + 1);
// Compute Error
//eL[k] = v_ref - vL[k];
eL[k] = v_ref - vmL;
// Compute integral of Error
eiL = (eL[k] + eL[k - 1]) * (AcT / 2);
}
// compute Duty Cycle
//Serial.println(String(k)+" : "+String(vL[k]));
dcL = dcNom + int(KpL * eL[k]) + int(KiL * eiL);
// Limit DC left wheel
if (dcL > dcMax) {
dcL = dcMax;
}
if (dcL < dcMin) {
dcL = dcMin;
}
if (controlStartL) {
// Send control command when control start
if (motRotL) {
//cRotL += AcL;
//Serial.println(cRotL);
//if (cRotL >= 10) {
if (tk[k] - turnTimeL >= 500) {
cRotL = 0;
motRotL = false;
if (motFon) {
Command = "w";
} else if (motBon) {
Command = "x";
} else {
Command = "s";
}
}
SendCommand(dcL, dcR);
}
else if (motFon) {
Command = "w";
SendCommand(dcL, dcR);
}
else if (motBon) {
Command = "x";
SendCommand(dcL, dcR);
}
}
k++;
if (k == Ns) {
rpsL = vmL; // store data
//cL = 0;
//vmL = 0;
k = 0;
}
}
}
// T2: Control right wheel
void loop2(100) {
static int k = 0;
const int Ns = 10; // number of samplings
const int dcMax = 4096;// Max duty cycle
const int dcMin = 1000;// Min duty cycle
const int dcNom = 3600;// Nominal duty cycle
const double v_ref = 1.5;// Velocity of reference
const double KpR = 150;// K proportional
const double KiR = 80;// K integrative
//static int dcR = 0;
static unsigned long tk[Ns];
static unsigned long ckR[Ns]; // R trans for sampling
static double vR[Ns]; // Velocity
static double eR[Ns]; // Error
static double eiR = 0.0; // Integral of error
static double vsR = 0.0;
static double vmR = 0.0;
static unsigned long cRotR = 0;// Used to control the number of rotation of wheel
static bool firstStartR = true;
static bool rotRstart = false;
static unsigned long AcR; // Rise variation
static unsigned long AcT; // Time variation
//------------------------------------------------
tk[k] = millis();
ckR[k] = cR;
cR = 0;
if (firstStartR) {
vR[0] = 0;
eR[0] = 0;
vmR = 0;
AcT = 0;
AcR = 0;
k = 1;
firstStartR = false;
}
else {
if (k == 0) {
// Compute changes ad time variation
AcT = tk[k] - tk[Ns - 1];
AcR = ckR[k];
vR[k] = vR[Ns - 1];
vsR = vR[k];
// Compute Error
//eR[k] = v_ref - vR[k];
eR[k] = v_ref - vmR;
// Compute integral ofError
eiR = (eR[k] + eR[Ns - 1]) * (AcT / 2);
}
else {
// Compute changes ad time variation
AcT = tk[k] - tk[k - 1];
AcR = ckR[k];
// Compute velocity of wheels
vR[k] = 50.0 * double(AcR) / double(AcT);
// Compute mean velocity of wheels
vsR += vR[k];
vmR = vsR / double(k + 1);
// Compute Error
//eR[k] = v_ref - vR[k];
eR[k] = v_ref - vmR;
// Compute integral ofError
eiR = (eR[k] + eR[k - 1]) * (AcT / 2);
}
// Compute Duty Cycle
dcR = dcNom + int(KpR * eR[k]) + int(KiR * eiR);
// Limit DC right wheel
if (dcR > dcMax) {
dcR = dcMax;
}
if (dcR < dcMin) {
dcR = dcMin;
}
if (controlStartR) {
// Send control command
if (motRotR) {
//cRotR += AcR;
//Serial.println(cRotL);
//if (cRotR >= 10) {
if (tk[k] - turnTimeR >= 500) {
cRotR = 0;
motRotR = false;
if (motFon) {
Command = "w";
} else if (motBon) {
Command = "x";
} else {
Command = "s";
}
}
SendCommand(dcL, dcR);
}
else if (motFon) {
Command = "w";
SendCommand(dcL, dcR);
}
else if (motBon) {
Command = "x";
SendCommand(dcL, dcR);
}
}
k++;
if (k == Ns) {
//rpsR = float(ckR[Ns - 1]) / CFL;
rpsR = vmR; // store data
//cR = 0;
//vmR=0;
k = 0;
}
}
}
// T3: Test PC serial and W-Fi serial
void loop3(50) {
static int indx = 0;
// Test if serial command is available
if (Serial.available() > 0) {
Command = Serial.readString();
SendCommand(dc_max, dc_max);
}
// Test if serial WiFi is available
while (Serial1.available () > 0) {
Buffer = Serial1.readStringUntil('\r');
Serial.print(Buffer);
if ( Buffer.lastIndexOf("+IPD") >= 0 ) {
indx = Buffer.lastIndexOf(":");
Command = Buffer.substring(indx + 1);
//Serial.print("Wi-Fi command: ");
//Serial.print(Command);
SendCommand(dc_max, dc_max);
Data = "ok";
Buffer = "";
}
else if (Buffer.lastIndexOf("Link") >= 0) {
//Serial.println("");
//Serial.println("Connected");
Data = "connected";
wifiCon = true;
Buffer = "";
}
else if (Buffer.lastIndexOf("Unlink") >= 0) {
//Serial.println("");
//Serial.println("Disconnected");
//Serial1.flush();
Data = "";
wifiCon = false;
Buffer = "";
}
else if ( Buffer.lastIndexOf("OK") >= 0 ) {
okfound = true;
Buffer = "";
}
else if ( Buffer.lastIndexOf("ready") >= 0 ) {
readyfound = true;
Buffer = "";
}
//Buffer = "";
}
}
// T4: Obstacle detecting
void loop4(200) {
float cmM;
static Ultrasonic ultrasonic(ul_trig, ul_eco);
cmM = float(ultrasonic.distanceRead(CM));
//Serial.print("Sensore di distanza [cm]: ");
//Serial.println(cmMsec);
if ( cmM <= 5 ) {
Command = "s";
SendCommand(0, 0);
}
}
// T5: WiFi handle
void loop5(500) {
static WiFiESP8266 wifi(Network, Password, KeyType, Channel);
if (!start) {
// WiFi initialize
wifi.init();
delay(100);
wifi.SetSoftAPmode();
delay(100);
wifi.CreateServer();
delay(100);
Serial.println("START WiFi OK");
start = true;
} else {
if (Data != "") {
if ( !wifiCon && start) {
Serial.println(Data);
//Serial.println(datastr);
Data = "";
}
else if ( wifiCon) { //&& Serial1.available () <= 0) {
while (Serial1.availableForWrite() <= 0);
// WiFi send data
wifi.SendDataRequest(Data);
//Serial1.flush();
Data = "";
}
//Data = "";
}
}
// WiFi command info
if (Command == "1") {
wifi.GetIP_ClientPC();
Command = "";
}
}
// T6: Data to send creation and GPS handler
void loop6(500) {
static String datastr = "";
static float lat = 0;
static float lon = 0;
// Connect to the GPS on the hardware port
static Adafruit_GPS GPS(&GPSSerial);
t = millis();
if (start) {
if (!GPSstart ) {
GPS.begin(9600);
GPS.sendCommand(PMTK_SET_NMEA_OUTPUT_RMCONLY);
while (GPSSerial.available())
GPS.read();
Serial.print("\nSTARTING LOGGING....");
if (GPS.LOCUS_StartLogger())
Serial.println(" STARTED! ");
else
Serial.println(" no response :(");
GPSstart = true;
} else {
while (GPSSerial.available () > 0) {
BufferGPS += GPS.read();
}
if (GPS.newNMEAreceived()) {
//Serial.println(GPS.lastNMEA()); // sets the newNMEAreceived() flag to false
if (!GPS.parse(GPS.lastNMEA())) // sets the newNMEAreceived() flag to false
return; // we can fail to parse a sentence in which case we should just wait for another
lat = GPS.latitudeDegrees;
lon = GPS.longitudeDegrees;
GPSfix = GPS.fix;
}
BufferGPS = "";
}
if (Data == "") {
if (!wifiCon) {
datastr = String(t);
datastr += ",";
datastr += String(rpsL);
datastr += ",";
datastr += String(rpsR);
Data = datastr;
}
else {
if (GPSfix) {
datastr = String(t);
datastr += ":";
datastr += String(lat, 6);
datastr += ",";
datastr += String(lon, 6);
Data = datastr;
} else {
Data = "connected";
}
}
}
}
}
/*
* Motor.cpp
*
*/
//home/manu/.arduino15/packages/arduino/hardware/sam/1.6.11/cores/arduino
#include <Arduino.h>
#include "Motor.h"
Motor::Motor(int enPin,int APin, int BPin) {
en=enPin;
A=APin;
B=BPin;
analogWrite(en,0);
}
//_________________________________ATTUAZIONE MOTORE_________________________________
void Motor::forward(int D){
analogWrite(en,D);
digitalWrite(A,LOW);
digitalWrite(B,HIGH);
}
void Motor::back(int D){
analogWrite(en,D);
digitalWrite(A,HIGH);
digitalWrite(B,LOW);
}
void Motor::stopMot(){
analogWrite(en,0);
}
/*
* WiFiESP8266.cpp
*
*/
#include <Arduino.h>
#include <string>
#include <stdio.h>
//#include <iostream>
#include "WiFiESP8266.h"
using namespace std;
// char*=std::string&
WiFiESP8266::WiFiESP8266(String Network,String Password,String Channel,String KeyType) {
Net=Network;
Pas=Password;
Cha=Channel;
KeyTy=KeyType;
buffer="";
connected=false;
}
void WiFiESP8266::init(){
//Serial1.begin (115200);
//restart ESP8266
Serial1.print ("AT+RST\r");
delay(10);
}
void WiFiESP8266::SetSoftAPmode(){
String Com;
//Serial.println("Input followin information");
Serial.print ("Network: ");
//Network=ReadString();
Serial.println (Net);
Serial.print ("Password: ");
//Password=ReadString();
Serial.println (Pas);
Serial.print ("Channel: ");
//Channel=ReadString();
Serial.println (Cha);
Serial.print ("Key Type: ");
//KeyType=ReadString();
Serial.println (KeyTy);
//Wi-Fi mode station-softAP (STA-SAP)
Serial1.print ("AT+CWMODE=3\r");
delay(10);
// Set configuration of SAP mode
Com ="AT+CWSAP=\"";
Com +=Net;
Com +="\",\"";
Com +=Pas;
Com +="\",";
Com +=Cha;
Com +=",";
Com +=KeyTy;
Com +="\r";
Serial1.print(Com);
delay(10);
//Serial1.print("AT+RST\r");
}
void WiFiESP8266::CreateServer(){
Serial.println("Create server: ");
// enable multi connection
Serial1.print("AT+CIPMUX=1\r");
delay(10);
//delay(25);
// CIPSERVER=mode,port
// mode=1: create server;
// mode=0: delete serever;
// port: number of port (333 defoult)
Serial1.print("AT+CIPSERVER=1,333\r");
delay(10);
// set timeout time in a range (0-7200 [second])
Serial1.print("AT+CIPSTO=120\r");
delay(10);
}
void WiFiESP8266::GetIP_ClientPC(){
Serial.print("IP rover: ");
Serial1.print("AT+CIPSTATUS\r");
delay(10);
Serial.println("");
Serial.print("IP connesso: ");
Serial1.print("AT+CWLIF\r");
delay(10);
}
/*
void ESP8266::WiFi_SendData(){
if (connected){
Serial.println("Data to send:");
if(Serial.available()>0){
data=Serial.readString();
Serial.println(data);
SendData(data);
}
}
}
void ESP8266::SendData(String dat){
String Com;
bool sendper=true;
Com="AT+CIPSEND=0,";
Com +=String(dat.length());
Com += "\r";
//Serial1.print("AT+CIPSEND=0,");
//Serial1.print(dat.length());
//Serial1.print("\r");
Serial1.print(Com);
while (sendper){
if (Serial1.find ('>')){
Serial1.print(dat);
Serial1.print("\r");
//Serial.print (" > ");
//Serial.print(dat);
sendper=false;
}
}
}*/
void WiFiESP8266::SendDataRequest(String dat){
String Com;
Com="AT+CIPSEND=0,";
Com +=String(dat.length());
Com += "\r";
Serial1.print(Com);
Com=dat;
Com+="\r";
if ( Serial1.find('>') ) {
Serial1.print(Com);
}
}
void WiFiESP8266::TestSerialWiFi(){
while (Serial1.available () > 0){
buffer=Serial1.readStringUntil('\r');
//Serial.print(buffer);
if (buffer=="Link"){
//Serial.println("");
//Serial.println("Connesso");
connected=true;
}
}
}
void WiFiESP8266::CloseTCPconnection(){
Serial.println("Close:");
Serial1.print("AT+CIPCLOSE\r");
delay(10);
}

Comments