


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 2 | |||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Il owned two cards arduino uno and two Grove cards to deal with Lora 433 Mhz.
I wanted to do some devices that could communicate with my Jeedom box to send some informations from sensors : kind of "home IOT"
I add my Arduino two new sensors :
- one get temp and atmos pressure
- the other get humidity and temp
So I've got :
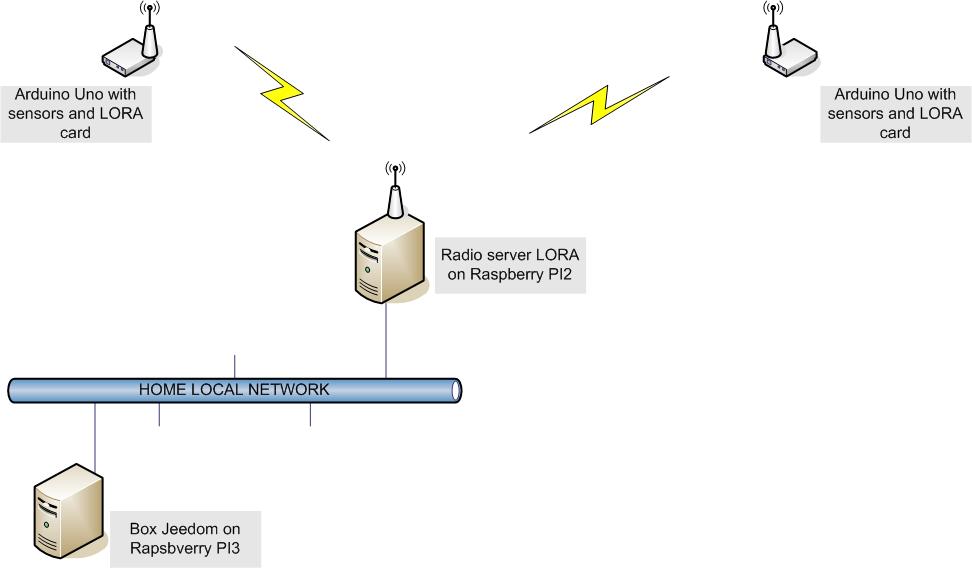
- one arduino Uno with a temp and pressure sensor fit with a Lora card
- another Arduino uno with a humidity and temp sensor and also fit with a Lora card
- a raspeberry PI2 also with a Lora card, that's a kind of radio Server : it receive the message send by the Arduino Uno device.
- and my Jeedom Box on a Raspberry PI3
On each Arduino there is a C prog that read the sensors and send a short message to the radio Server.
On the PI2 (the Radio Server) the message from the Arduino are catch by a python prog and send via HTTP to the Jeedom Box. A virtual object into Jeedom receive the value for each sensor and show it in the web page.
I send message from Arduino 1 or 2 times per hour. One of the Arduino devices is in my home, not so far from the Radio Server, but the other one is 5 floors under my home into the cellar. It's into a building made with reinforced concrete. It's very difficult to deal with radio signal in this kind of building. It what I wanted to test with Lora. This technology is very intereting in this case. And it works. The message are small and the radio protocol try his best to send the message through the iron of the wall !
I used the demo prog of each radio cards to start. On the hardware tab I give the link to the card and you will find the links to the starter kit code each time. For Lora I've changed some parameters after reading the datasheet of the RFM95 component. You have to tune the radio protocol to have reliability in the radio exchange in particular with the Arduino which in the Cellar, 5 floors under the home.
On the Lora card for the PI, I sold a 17, 3 cm wire as the antenna. The length is calculate for the 433 Mhz frequency used for Lora.


{kind=link}
Comments