


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Reconnaissance Droid - Inspired by "StarWars"
Started for the "Are You An IoT Jedi" contest with the Particle Photon and Particle cloud as focus
By Jeremy M. Dunham
Developer and Designer: Jeremy M. Dunham
Control this Reconnaissance Droid through a particle photon, the particle cloud and Bluetooth and/or Wi-Fi. Get a notification when this droids PIR sensor detects the “rebel scum” – Empire. Allowing the Empire to turn the camera on, and see what rebellious acts they are up to.
Although I don't give you everything right now that I am working on. I am pretty sure there is enough here to take it and develop it even further if one wanted. Everything I am doing is pretty basic I am just bringing it all together in this droid. If I missed acknowledging someone my apologies, I appreciate everyone who helps IOT along. Other way is to just wait until I update it with all of my final systems and prototype. This is definitely still a work in progress. I am still working on different designs for the housing. Although above in the profile is a pretty close rough outline of how I want it to look.
Original Sketch
Some pictures of Assembly and Journey along the way.
Materials Needed:
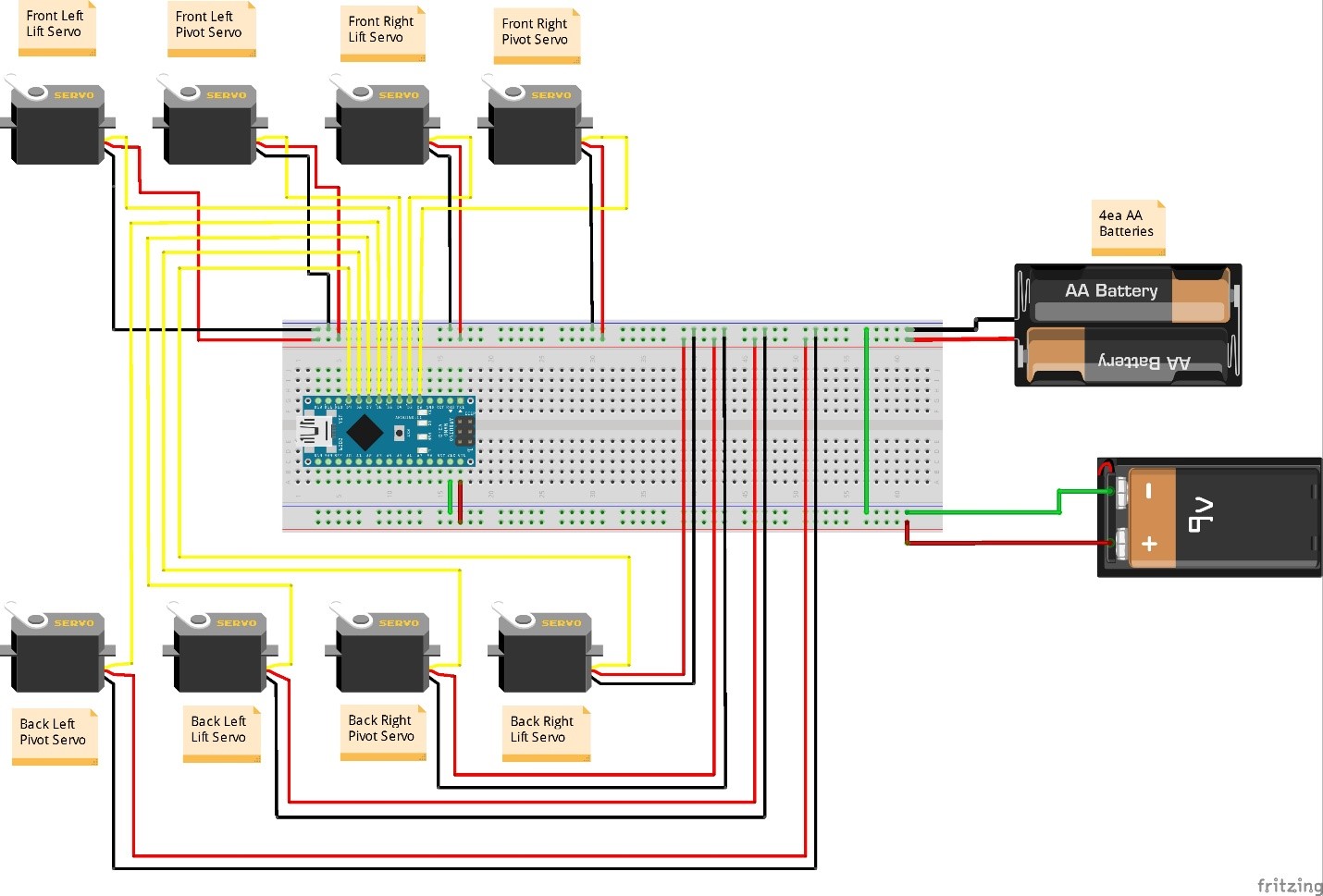
- 1 X Deluxe mePed Kit
- 1 x MicroUsb
- Resisters (depends on power requirements)
- 1 x Balsa Wood Hobby Kit
- 1 x 180 degree fisheye camera serial opt. preferred.
- 1 x 10” round hollow half sphere (Styrofoam)
- 1 x 12“ smooth foam disk (Styrofoam)
- 1 x zip file of 3d printed parts if desired (using Bass wood provided, and balsa wood along with Styrofoam for prototyping purposes.)
- 1 x particle photon
- 1 x duck antenna
- 1 x power source (I am using a power stick) rechargeable.
- 1 x 9v battery and connector
- 1 x microcontroller of choice (using ard.)
- M2 and M3 fasteners or fasteners of choice
- Female and male to female connectors
- 2 x mini breadboards or size of choice. (Just make sure it all fits before committing to a size)
- Zip ties (it’s better to have too many rather, than too little when it comes to zip ties)
- 1 x board of smooth foam (Styrofoam)
- Extra m3 and m2 screws 10mm and 12mm
Optional:
Could use 2 or 3 photons to control everything also. With about same power requirements.
Tools Needed –
Utility Knife, Screw drivers several sizes from normal to tiny, Allen wrench/hex key, plyers, ruler, masking tape or straps of choice, Styrofoam cutting tool kit,
Housing: In prototype phase. In production or final prototype phase will be 3d printed or manufactured. Use zip file of parts with my parts added when 3d printing.
Software Needed;
IDE for Microcontrollers (if ard. Then go with starter code provide with medPed).
Particle Dev, Zip file
Still in software prototyping phase – There are many options out there to create your own though. Depending on your needs. The sensors I am using are pretty standard. Ideally it will be two systems or one integrate. One to notify and control camera. One to control the Recon droid’s movement through Bluetooth or Wifi on your phone. Keep checking for updates on portal1.graphicentertainment.net or this project to find current updates.
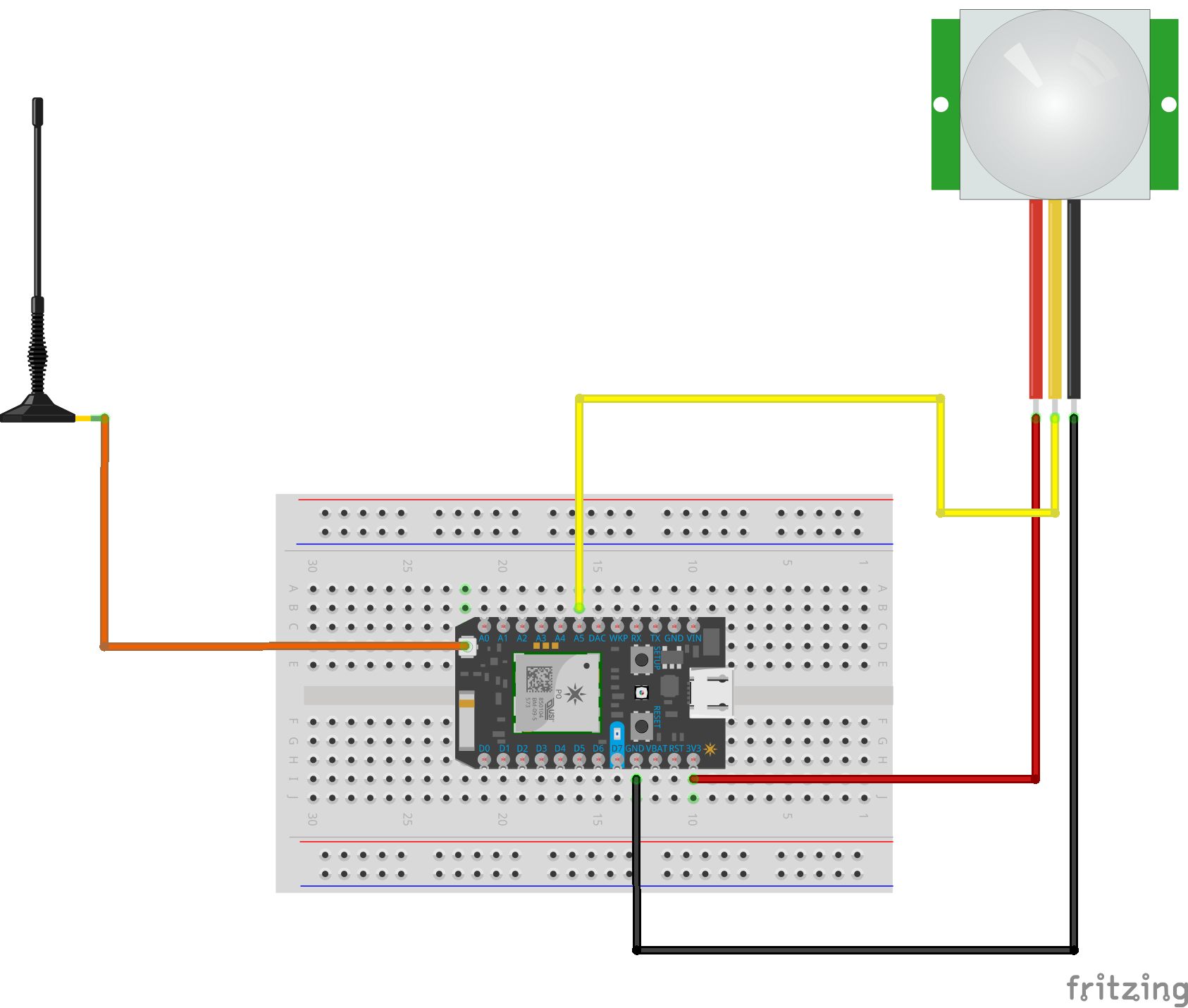
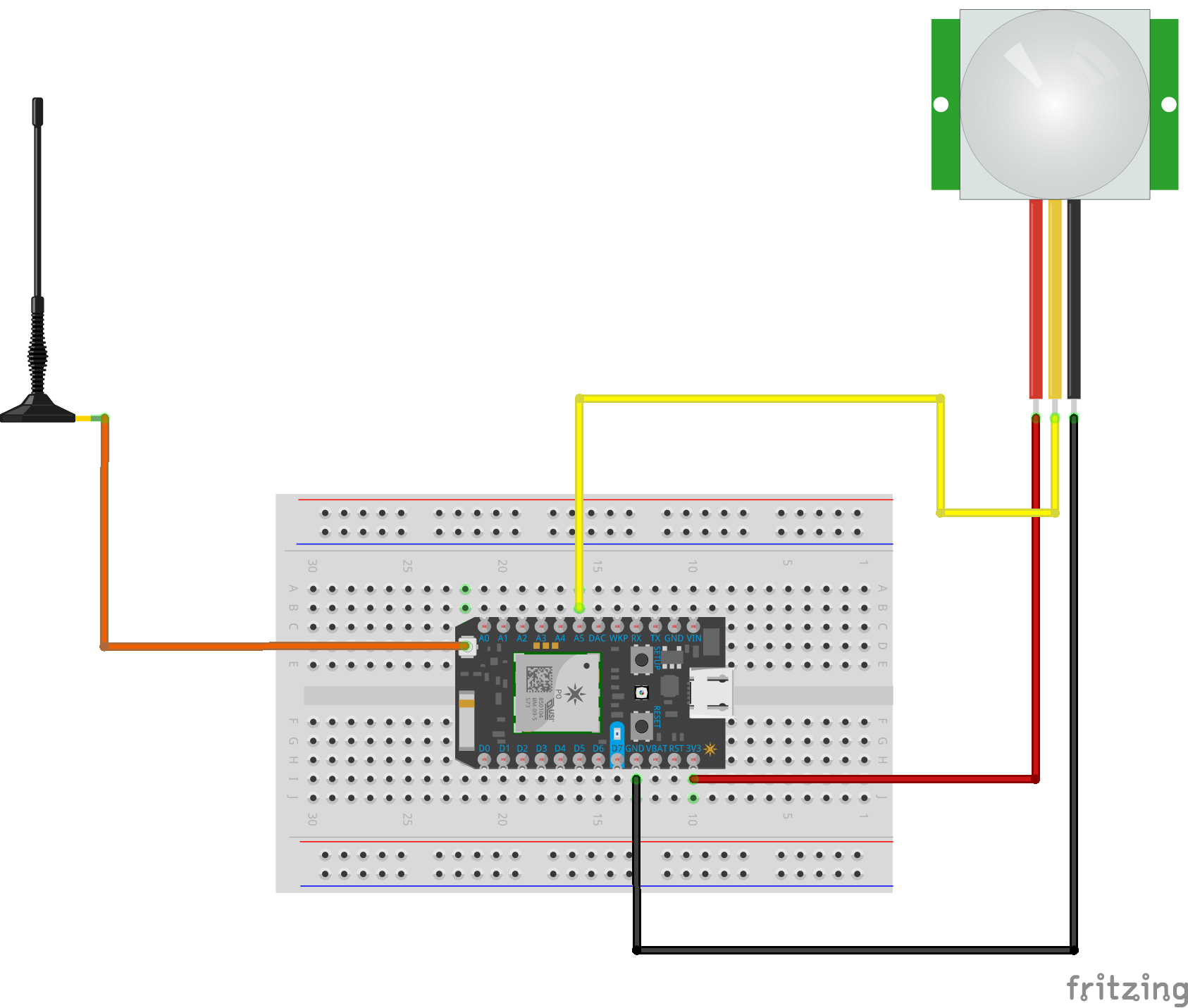
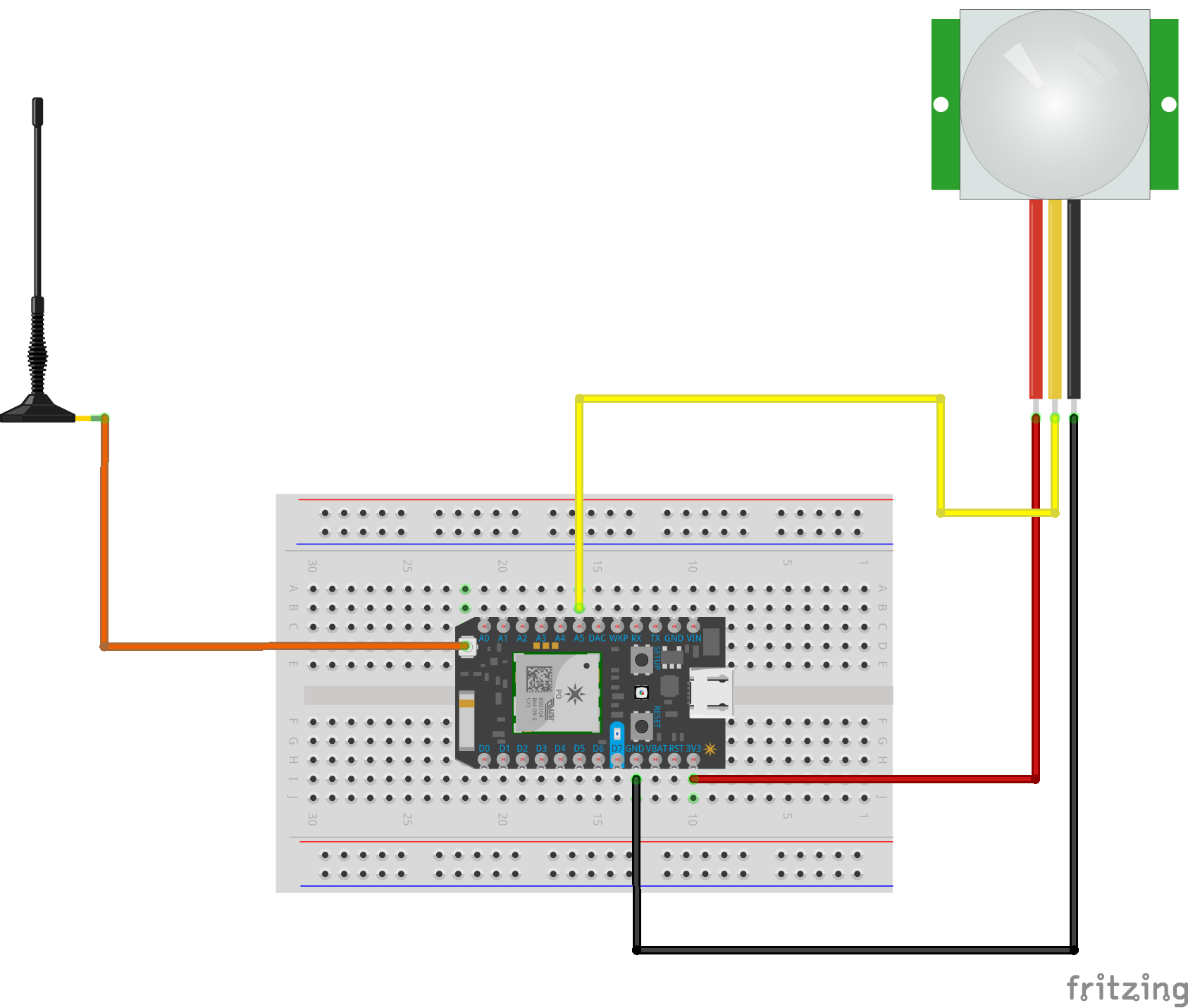
A5 is subjective place the signal on/off where it works best for you. If you are going to use the duck antenna as I have. You will also want to add this to the Firmware.
WiFi.selectAntenna(ANT_EXTERNAL);
some of the software in action
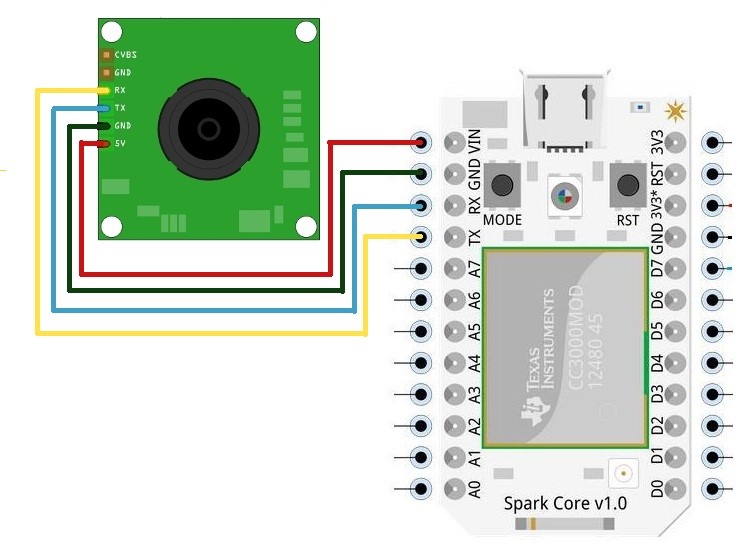
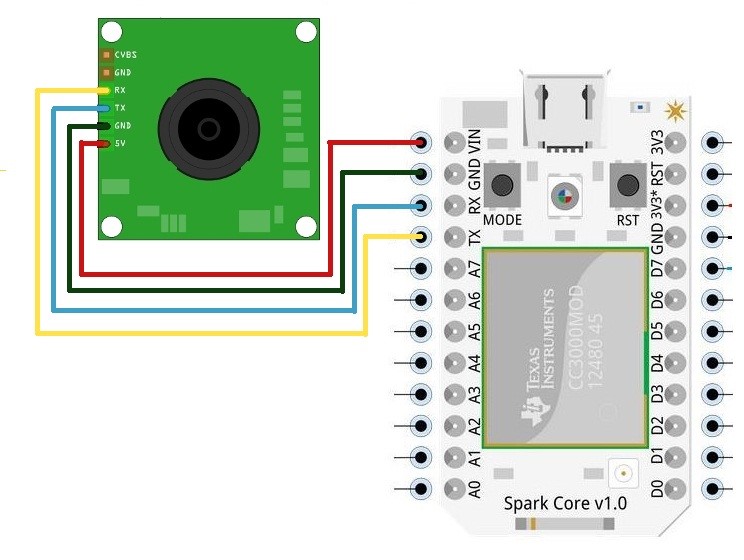
Although the below is a core the photon is setup the same.
// SYNTAX
Serial.begin(speed); // via USB port
Serial1.begin(speed); // via TX/RX pins
Serial2.begin(speed); // on Core via
// D1(TX) and D0(RX) pins
// on Photon/Electron via
// RGB-LED green(TX) and
// RGB-LED blue (RX) pins
PIR fritz below
<br/>







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments