Do you ever get tired of your favorite four legged friend waking you up at 6 in the morning and telling you "FEED ME"? Wouldn't you like it if there were a device that just fed your dog for you so you can hit the snooze button 7 more times? Want to have an automatic dog feeder without breaking the bank to do so? That is exactly what we have designed, but our version can do a little bit more than you expect. Not only can you set this device to feed your dog in the early hours but you can also tell your device to feed your dog at other specific times of the day! If that isn't enough, we also added another feature that will tell you when it is time to go out and buy more food when the container is empty or close to being empty.
How it works
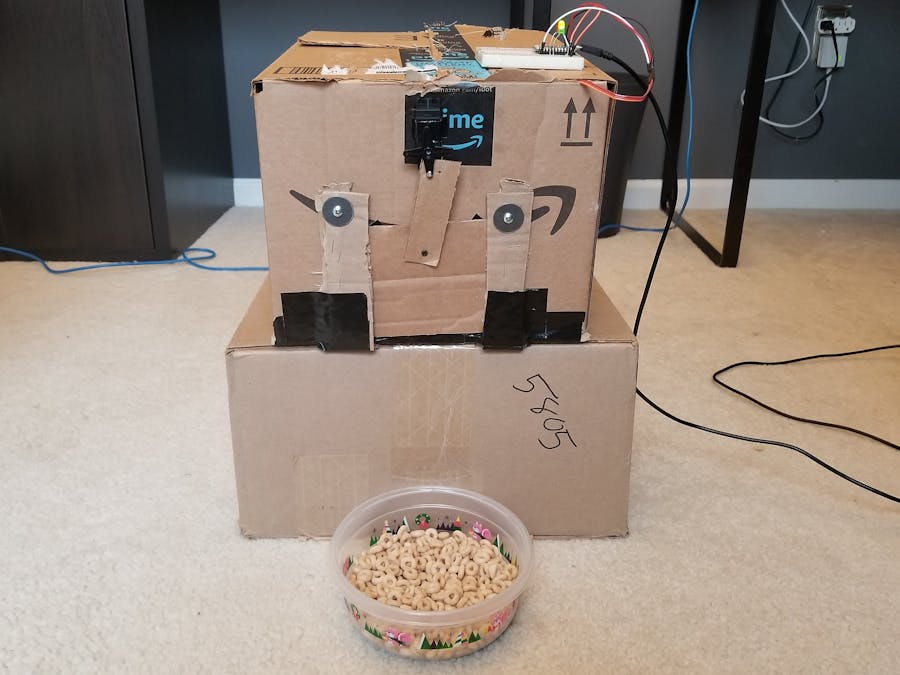
The door to the container is being told to open at three specific times of the day. These times can be altered to the pet owner's preference. The gate is set to open for two seconds in out tests, but the time can easily be adjusted to accommodate different sizes of dogs. To ensure the gate smoothly opens and closes each time, it is guided by "rails" which keep it contained and travelling a repeatable path.
Feed Gate Open (Can dogs eat Cheerios?)
Underneath the food storage container is a push button that is acting as a sensor for the quantity of food remaining. When enough food is remaining in the container for the regular feedings, the spring located at the rear of the food container is compressed, allow the weight to rest onto the button.
Button Underneath Food Container (It's on the right)
Once the food reaches a low enough level, a threshold which is calibrated by increasing or decreasing the spring pressure by rotating the retaining screw, the food container is lifted back up and the push button will no longer be pressed.
Adjustable Spring, to change pressure simply rotate the screw head
In addition to the food sensor requiring adequate food to activate the servo motor and provide the loving pup with it's required meals, the button is used to activate two LEDs. These LEDs, one green and one red, notify the owner of the status of the food quantity. If the green light is active, then there is enough food remaining in the container, and the dog will be fed.
Green LED, food is ok
If the red light is active, then the food is low and needs to be refilled.
Red LED, get more food!
ThingSpeak
The following are images of the status of the food container. As seen in the graphs, the Food Weight Threshold of 1 means there is enough food remaining in the container. When the food weight is 0, the feeder must be refilled.
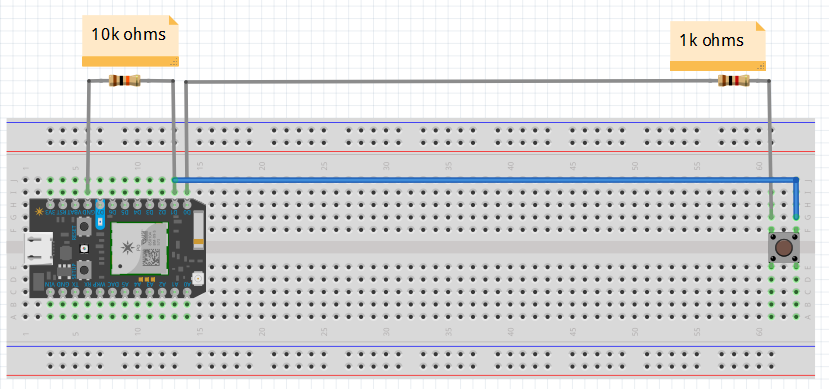
This board contains the button circuit and photon, which is the primary "brain" of the system. This configuration has two primary purposes: to find the time of day and compare that to the required feed times, and to read the output of the button to determine if the food weight is above or below the threshold required to refill. This information is then sent through a wireless connection to the servo photon to administer the feeding, as well as determine which color LEDs must be displayed.
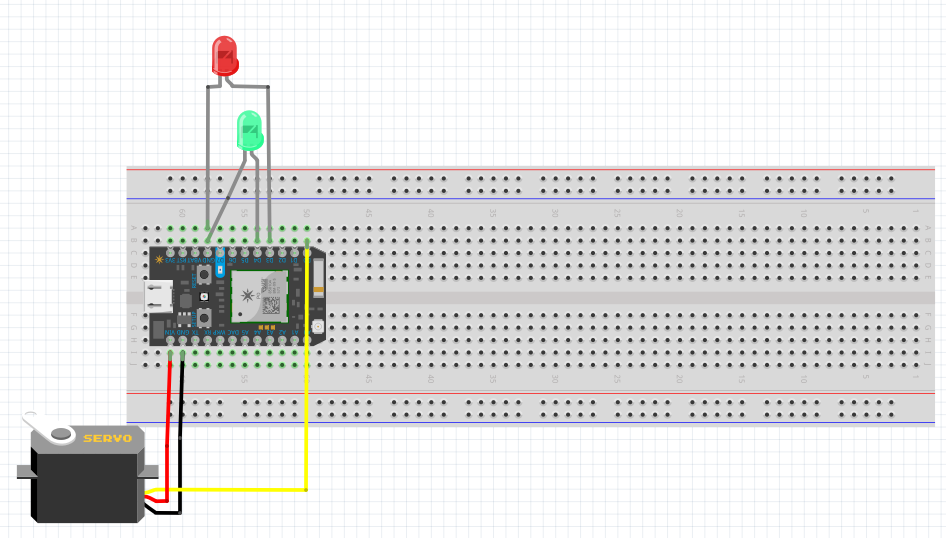
Servo and LED Board
This board is considered the secondary and weights for input from the button board to proceed. After this board receives the notice to feed and display an LED color, it informs the primary button board of the successful feeding, and waits for a second weight reading to display a final LED color.
The code displayed here is the brain of the dual photon system, and is downloaded to the photon which is connected to the button circuit. The purpose of this circuit is to activate at the specified time, determine the status of the food inside the container, and send the appropriate response to the second photon. In addition, if the second photon activates a feed, this photon rechecks the status of the food container and updates the second photon with the LEDs.
This photon is secondary to the DogFeederButton photon, and waits until the button photons tells it to do anything. When activated by the code telling it to display green, display red, or both display green and run the servo motor, it responds by completing the corresponding action. If the servo photon successfully completes the feed, it informs the primary photon, waits for further command, and then is told to display another light for the post-feed food status.

















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments