

Hardware components | ||||||
| × | 72 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
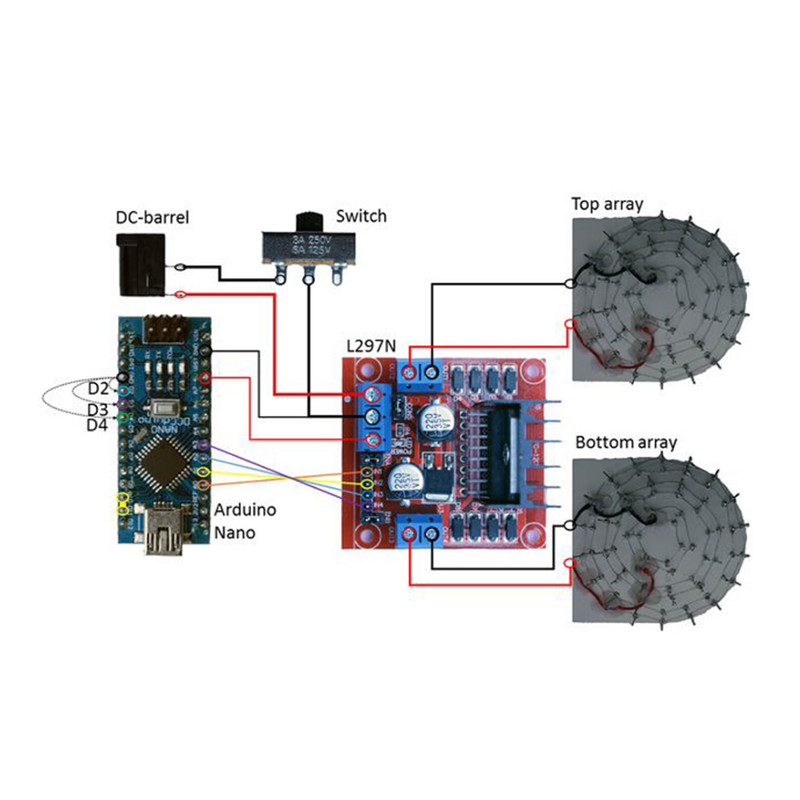
Today with an Arduino, a 3D printer and information found online, it's possible to make extroardinary machines.
We built a levitation machine that uses 72 ultrasonic transducers. The transducers work at 40 kHz and can trap objects with a density greater than 2.2g/cm3 and a diameter of 4mm.
The levitation of water, paper and styrophoamspheres is possible and shown in this video:
https://www.facebook.com/ClubAsimov/videos/1977110885917161/
Now you can get all the components in this kit: https://www.makerfabs.com/index.php?route=product/product&product_id=508
Tinylev Stand: https://www.thingiverse.com/thing:2766680
Complete tutorial: https://www.instructables.com/id/Acoustic-Levitator/
We want to show you once again that robotics and science can be really cool!
#include <avr/sleep.h>
#include <avr/power.h>
#define N_PORTS 1
#define N_DIVS 24
#define WAIT_LOT(a) __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop");__asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop");__asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop");__asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop")
#define WAIT_MID(a) __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop");__asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop");__asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop")
#define WAIT_LIT(a) __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop"); __asm__ __volatile__ ("nop")
#define OUTPUT_WAVE(pointer, d) PORTC = pointer[d*N_PORTS + 0]
#define N_BUTTONS 6
//half a second
#define STEP_SIZE 1
#define BUTTON_SENS 2500
#define N_FRAMES 24
static byte frame = 0;
static byte animation[N_FRAMES][N_DIVS] =
{{0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa},
{0x9,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x6,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa},
{0x9,0x9,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x6,0x6,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa},
{0x9,0x9,0x9,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x6,0x6,0x6,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa},
{0x9,0x9,0x9,0x9,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x6,0x6,0x6,0x6,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa},
{0x9,0x9,0x9,0x9,0x9,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x6,0x6,0x6,0x6,0x6,0xa,0xa,0xa,0xa,0xa,0xa,0xa},
{0x9,0x9,0x9,0x9,0x9,0x9,0x5,0x5,0x5,0x5,0x5,0x5,0x6,0x6,0x6,0x6,0x6,0x6,0xa,0xa,0xa,0xa,0xa,0xa},
{0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x5,0x5,0x5,0x5,0x5,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0xa,0xa,0xa,0xa,0xa},
{0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x5,0x5,0x5,0x5,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0xa,0xa,0xa,0xa},
{0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x5,0x5,0x5,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0xa,0xa,0xa},
{0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x5,0x5,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0xa,0xa},
{0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x5,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0xa},
{0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6},
{0x5,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0xa,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6},
{0x5,0x5,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0xa,0xa,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6},
{0x5,0x5,0x5,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0xa,0xa,0xa,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6},
{0x5,0x5,0x5,0x5,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0xa,0xa,0xa,0xa,0x6,0x6,0x6,0x6,0x6,0x6,0x6,0x6},
{0x5,0x5,0x5,0x5,0x5,0x9,0x9,0x9,0x9,0x9,0x9,0x9,0xa,0xa,0xa,0xa,0xa,0x6,0x6,0x6,0x6,0x6,0x6,0x6},
{0x5,0x5,0x5,0x5,0x5,0x5,0x9,0x9,0x9,0x9,0x9,0x9,0xa,0xa,0xa,0xa,0xa,0xa,0x6,0x6,0x6,0x6,0x6,0x6},
{0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x9,0x9,0x9,0x9,0x9,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0x6,0x6,0x6,0x6,0x6},
{0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x9,0x9,0x9,0x9,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0x6,0x6,0x6,0x6},
{0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x9,0x9,0x9,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0x6,0x6,0x6},
{0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x9,0x9,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0x6,0x6},
{0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x5,0x9,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0xa,0x6}};
void setup()
{
/*
for (int i = 0; i < (N_PORTS*N_DIVS); ++i){
animation[frame][i] = 0;
}
for (int i = 0; i < (N_PORTS*N_DIVS/2); ++i){
animation[frame][i] = 0b11111111;
}
for(int i = 0; i < N_DIVS; ++i){
if (i % 2 == 0){
animation[frame][i * N_PORTS] |= 0b00000001;
}else{
animation[frame][i * N_PORTS] &= 0b11111110;
}
}
*/
DDRC = 0b00001111; //A0 to A3 are the signal outputs
PORTC = 0b00000000;
pinMode(10, OUTPUT); //pin 10 (B2) will generate a 40kHz signal to sync
pinMode(11, INPUT_PULLUP); //pin 11 (B3) is the sync in
//please connect pin 10 to pin 11
for (int i = 2; i < 8; ++i){ //pin 2 to 7 (D2 to D7) are inputs for the buttons
pinMode(i, INPUT_PULLUP);
}
// generate a sync signal of 40khz in pin 10
noInterrupts(); // disable all interrupts
TCCR1A = bit (WGM10) | bit (WGM11) | bit (COM1B1); // fast PWM, clear OC1B on compare
TCCR1B = bit (WGM12) | bit (WGM13) | bit (CS10); // fast PWM, no prescaler
OCR1A = (F_CPU / 40000L) - 1;
OCR1B = (F_CPU / 40000L) / 2;
interrupts(); // enable all interrupts
// disable everything that we do not need
ADCSRA = 0; // ADC
power_adc_disable ();
power_spi_disable();
power_twi_disable();
power_timer0_disable();
//power_usart0_disable();
Serial.begin(115200);
byte* emittingPointer = &animation[frame][0];
byte buttonsPort = 0;
bool anyButtonPressed;
bool buttonPressed[N_BUTTONS];
short buttonCounter = 0;
LOOP:
while(PINB & 0b00001000); //wait for pin 11 (B3) to go low
OUTPUT_WAVE(emittingPointer, 0); buttonsPort = PIND; WAIT_LIT();
OUTPUT_WAVE(emittingPointer, 1); anyButtonPressed = (buttonsPort & 0b11111100) != 0b11111100; WAIT_MID();
OUTPUT_WAVE(emittingPointer, 2); buttonPressed[0] = buttonsPort & 0b00000100; WAIT_MID();
OUTPUT_WAVE(emittingPointer, 3); buttonPressed[1] = buttonsPort & 0b00001000; WAIT_MID();
OUTPUT_WAVE(emittingPointer, 4); buttonPressed[2] = buttonsPort & 0b00010000; WAIT_MID();
OUTPUT_WAVE(emittingPointer, 5); buttonPressed[3] = buttonsPort & 0b00100000; WAIT_MID();
OUTPUT_WAVE(emittingPointer, 6); buttonPressed[4] = buttonsPort & 0b01000000; WAIT_MID();
OUTPUT_WAVE(emittingPointer, 7); buttonPressed[5] = buttonsPort & 0b10000000; WAIT_MID();
OUTPUT_WAVE(emittingPointer, 8); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 9); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 10); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 11); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 12); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 13); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 14); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 15); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 16); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 17); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 18); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 19); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 20); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 21); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 22); WAIT_LOT();
OUTPUT_WAVE(emittingPointer, 23);
if( anyButtonPressed ){
++buttonCounter;
if (buttonCounter > BUTTON_SENS){
buttonCounter = 0;
if (! buttonPressed[0] ) {
if( frame < STEP_SIZE ) {
frame = N_FRAMES-1;
}else{
frame-=STEP_SIZE;
}
}
else if (! buttonPressed[1] ) {
if ( frame >= N_FRAMES-STEP_SIZE ) {
frame = 0;
}else {
frame+=STEP_SIZE;
}
}else if (! buttonPressed[2] ) {
frame = 0;
}
emittingPointer = & animation[frame][0];
}
}else {
buttonCounter = 0;
}
goto LOOP;
}
void loop(){}


{kind=link}
Comments