


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
I wanted to create a robot that could bring snacks and all sorts of food items from the kitchen to my room, so I took few parts (aluminum channel and sheet) and combined them together to make this easy but working "butler robot."
Thanks UTSOURCE.net to offer electronic components for this project!
you can check UTSOURCE.net, they deal in all kinds of electronic components, for example, Arduino board, motor driver, and many more.
Watch the video!
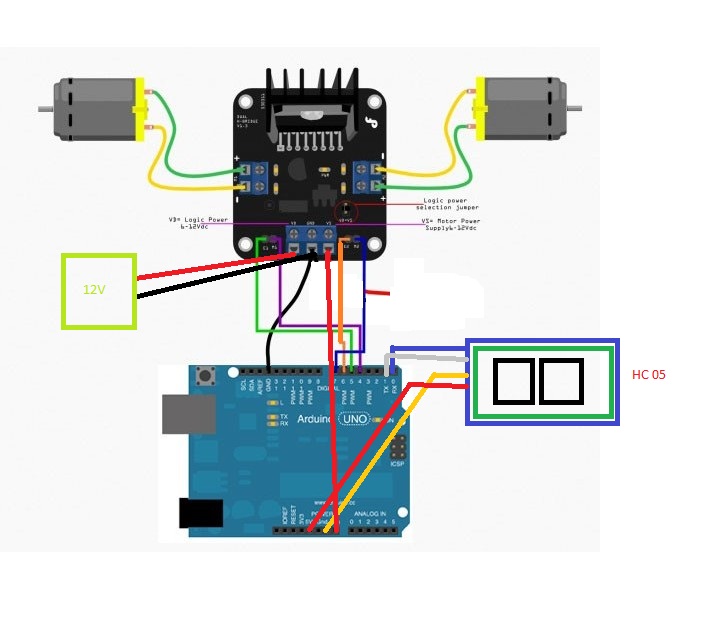
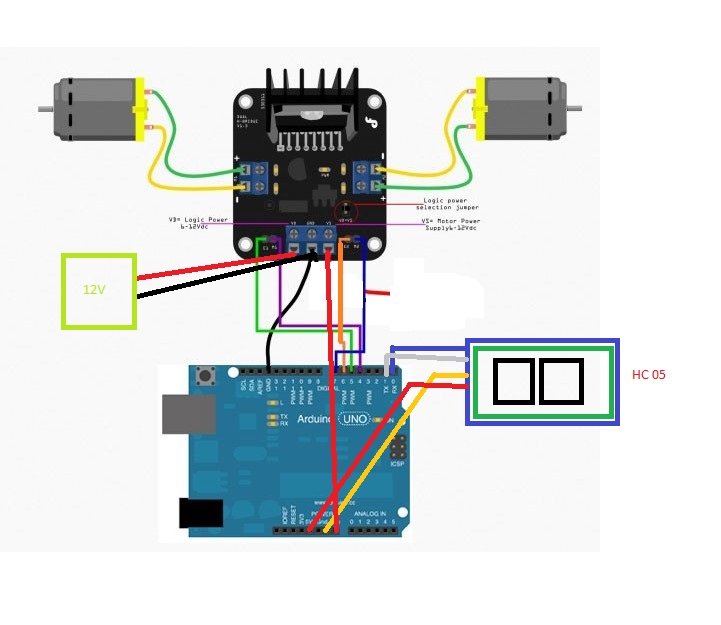
int motorLpin1 = 2;
int motorLpin2 = 3;
int motorRpin1 = 4;
int motorRpin2 = 5;
int rightMotorENA = 6;
int leftMotorENB = 9;
int motorSpeed = 255;
int turn=50;
void setup()
{
Serial.begin(9600);
Serial.flush();
pinMode(motorLpin1,OUTPUT);
pinMode(motorLpin2,OUTPUT);
pinMode(motorRpin1,OUTPUT);
pinMode(motorRpin2,OUTPUT);
pinMode(rightMotorENA,OUTPUT);
pinMode(leftMotorENB,OUTPUT);
}
void loop(){
String input="";
while(Serial.available()){
input+=(char)Serial.read();
delay(5);
}
if(input=="n"){
MotorStop();
}
else if(input=="F"){
MotorForward();
}
else if(input=="R"){
MotorBackward();
}
else if(input=="TL"){
MotorLeft();
}
else if(input=="TR"){
MotorRight();
}
else if(input=="RR"){
rightRight();
}
else if(input=="M"){
StraightStraight();
}
}
void MotorForward(void)
{
digitalWrite(motorLpin1,HIGH);
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
}
void MotorBackward(void)
{
digitalWrite(motorLpin1,LOW);
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,LOW);
digitalWrite(motorRpin2,HIGH);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
}
void MotorLeft(void)
{
digitalWrite(motorLpin1,HIGH);
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,LOW);
digitalWrite(motorRpin2,HIGH);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
}
void MotorRight(void)
{
digitalWrite(motorLpin1,LOW);
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
}
void MotorStop(void)
{
digitalWrite(motorLpin1,LOW);
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,LOW);
digitalWrite(motorRpin2,LOW);
digitalWrite(leftMotorENB,LOW);
digitalWrite(rightMotorENA,LOW);
}
void rightRight(void){
digitalWrite(motorLpin1,LOW); //turn right
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(600);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(600);
}
void StraightStraight (void){
digitalWrite(motorLpin1,HIGH); //staright
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(4000);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,LOW); //turn right
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(100);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,HIGH); //straight
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(4000);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,LOW); //turn right
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(100);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,HIGH); //straight
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(4000);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,LOW); //turn right
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(100);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,HIGH); //straight
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(4000);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,LOW); //turn right
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(100);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,HIGH); //straight
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(4000);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,LOW); //turn right
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(100);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,HIGH); //straight
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(4000);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,LOW); //turn right
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(100);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,HIGH); //straight
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(4000);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,LOW); //turn right
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(100);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,HIGH); //straight
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(4000);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,LOW); //turn right
digitalWrite(motorLpin2,HIGH);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(100);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
digitalWrite(motorLpin1,HIGH); //straight
digitalWrite(motorLpin2,LOW);
digitalWrite(motorRpin1,HIGH);
digitalWrite(motorRpin2,LOW);
analogWrite(leftMotorENB,255);
analogWrite(rightMotorENA,255);
delay(4000);
analogWrite(leftMotorENB,LOW);
analogWrite(rightMotorENA,LOW);
delay(500);
}

375 projects • 390 followers
I'm Arnov. I build, design, and experiment with tech—3D printing, PCB design, and retro consoles are my jam.





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments