



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 3 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Have you ever thought about designing a robot that completes your work?
If yes, then you are in the righ place. This 3D printer makes use of steppers from old disk drives.
An image is given to a software that converts it into the respective G-code. First, it converts an image into a bitmap and later converts it into a lines of code.
It will be processed by an Arduino, which manages the extruder or pen to raise up and down on the sheet provided.
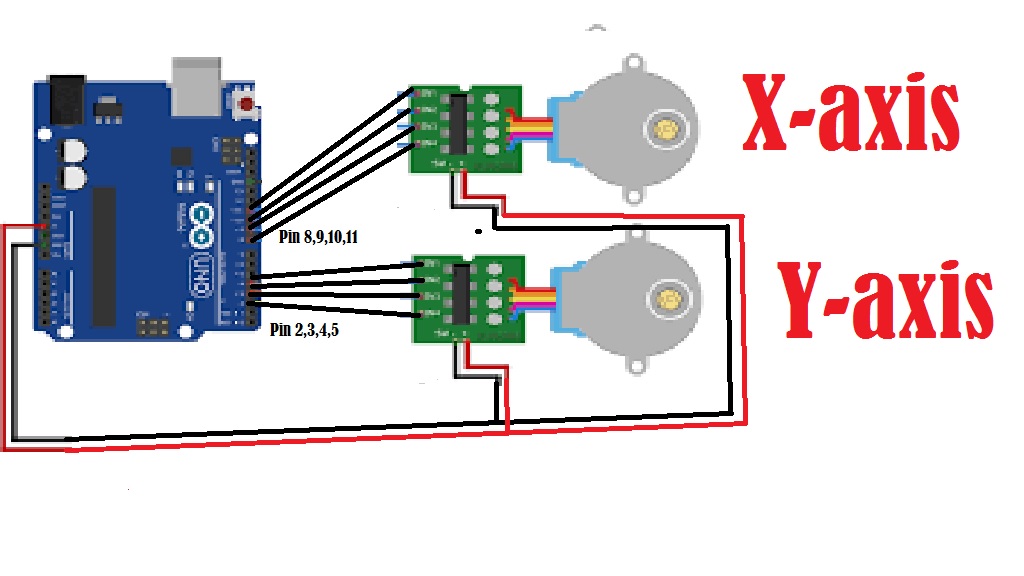
KINDLY SEE SCHEMATIC AND START DESIGNING
*happy coding*
#include <Servo.h>
#include <Stepper.h>
#define LINE_BUFFER_LENGTH 512
const int penZUp = 40;
const int penZDown = 80;
const int penServoPin = 6;
const int stepsPerRevolution = 60;
Servo penServo;
Stepper myStepperY(stepsPerRevolution, 5,3,4,2);
Stepper myStepperX(stepsPerRevolution, 11,9,10,8);
struct point {
float x;
float y;
float z;
};
struct point actuatorPos;
float StepInc = 1;
int StepDelay = 0;
int LineDelay = 50;
int penDelay = 50;
float StepsPerMillimeterX = 100.0;
float StepsPerMillimeterY = 100.0;
float Xmin = 0;
float Xmax = 100;
float Ymin = 0;
float Ymax = 100;
float Zmin = 0;
float Zmax = 1;
float Xpos = Xmin;
float Ypos = Ymin;
float Zpos = Zmax;
boolean verbose = false;
void setup() {
Serial.begin( 9600 );
penServo.attach(penServoPin);
penServo.write(penZUp);
delay(200);
myStepperX.setSpeed(200);
myStepperY.setSpeed(200);
Serial.println("Mini CNC Plotter alive and kicking!");
Serial.print("X range is from ");
Serial.print(Xmin);
Serial.print(" to ");
Serial.print(Xmax);
Serial.println(" mm.");
Serial.print("Y range is from ");
Serial.print(Ymin);
Serial.print(" to ");
Serial.print(Ymax);
Serial.println(" mm.");
}
void loop()
{
delay(200);
char line[ LINE_BUFFER_LENGTH ];
char c;
int lineIndex;
bool lineIsComment, lineSemiColon;
lineIndex = 0;
lineSemiColon = false;
lineIsComment = false;
while (1) {
while ( Serial.available()>0 ) {
c = Serial.read();
if (( c == '\n') || (c == '\r') ) {
if ( lineIndex > 0 ) {
line[ lineIndex ] = '\0';
if (verbose) {
Serial.print( "Received : ");
Serial.println( line );
}
processIncomingLine( line, lineIndex );
lineIndex = 0;
}
else {
}
lineIsComment = false;
lineSemiColon = false;
Serial.println("ok");
}
else {
if ( (lineIsComment) || (lineSemiColon) ) { // Throw away all comment characters
if ( c == ')' ) lineIsComment = false; // End of comment. Resume line.
}
else {
if ( c <= ' ' ) { // Throw away whitepace and control characters
}
else if ( c == '/' ) { // Block delete not supported. Ignore character.
}
else if ( c == '(' ) { // Enable comments flag and ignore all characters until ')' or EOL.
lineIsComment = true;
}
else if ( c == ';' ) {
lineSemiColon = true;
}
else if ( lineIndex >= LINE_BUFFER_LENGTH-1 ) {
Serial.println( "ERROR - lineBuffer overflow" );
lineIsComment = false;
lineSemiColon = false;
}
else if ( c >= 'a' && c <= 'z' ) { // Upcase lowercase
line[ lineIndex++ ] = c-'a'+'A';
}
else {
line[ lineIndex++ ] = c;
}
}
}
}
}
}
void processIncomingLine( char* line, int charNB ) {
int currentIndex = 0;
char buffer[ 64 ]; // Hope that 64 is enough for 1 parameter
struct point newPos;
newPos.x = 0.0;
newPos.y = 0.0;
// Needs to interpret
// G1 for moving
// G4 P300 (wait 150ms)
// G1 X60 Y30
// G1 X30 Y50
// M300 S30 (pen down)
// M300 S50 (pen up)
// Discard anything with a (
// Discard any other command!
while( currentIndex < charNB ) {
switch ( line[ currentIndex++ ] ) { // Select command, if any
case 'U':
penUp();
break;
case 'D':
penDown();
break;
case 'G':
buffer[0] = line[ currentIndex++ ]; // /!\ Dirty - Only works with 2 digit commands
// buffer[1] = line[ currentIndex++ ];
// buffer[2] = '\0';
buffer[1] = '\0';
switch ( atoi( buffer ) ){ // Select G command
case 0: // G00 & G01 - Movement or fast movement. Same here
case 1:
// /!\ Dirty - Suppose that X is before Y
char* indexX = strchr( line+currentIndex, 'X' ); // Get X/Y position in the string (if any)
char* indexY = strchr( line+currentIndex, 'Y' );
if ( indexY <= 0 ) {
newPos.x = atof( indexX + 1);
newPos.y = actuatorPos.y;
}
else if ( indexX <= 0 ) {
newPos.y = atof( indexY + 1);
newPos.x = actuatorPos.x;
}
else {
newPos.y = atof( indexY + 1);
indexY = '\0';
newPos.x = atof( indexX + 1);
}
drawLine(newPos.x, newPos.y );
// Serial.println("ok");
actuatorPos.x = newPos.x;
actuatorPos.y = newPos.y;
break;
}
break;
case 'M':
buffer[0] = line[ currentIndex++ ]; // /!\ Dirty - Only works with 3 digit commands
buffer[1] = line[ currentIndex++ ];
buffer[2] = line[ currentIndex++ ];
buffer[3] = '\0';
switch ( atoi( buffer ) ){
case 300:
{
char* indexS = strchr( line+currentIndex, 'S' );
float Spos = atof( indexS + 1);
// Serial.println("ok");
if (Spos == 30) {
penDown();
}
if (Spos == 50) {
penUp();
}
break;
}
case 114: // M114 - Repport position
Serial.print( "Absolute position : X = " );
Serial.print( actuatorPos.x );
Serial.print( " - Y = " );
Serial.println( actuatorPos.y );
break;
default:
Serial.print( "Command not recognized : M");
Serial.println( buffer );
}
}
}
}
void drawLine(float x1, float y1) {
if (verbose)
{
Serial.print("fx1, fy1: ");
Serial.print(x1);
Serial.print(",");
Serial.print(y1);
Serial.println("");
}
if (x1 >= Xmax) {
x1 = Xmax;
}
if (x1 <= Xmin) {
x1 = Xmin;
}
if (y1 >= Ymax) {
y1 = Ymax;
}
if (y1 <= Ymin) {
y1 = Ymin;
}
if (verbose)
{
Serial.print("Xpos, Ypos: ");
Serial.print(Xpos);
Serial.print(",");
Serial.print(Ypos);
Serial.println("");
}
if (verbose)
{
Serial.print("x1, y1: ");
Serial.print(x1);
Serial.print(",");
Serial.print(y1);
Serial.println("");
}
// Convert coordinates to steps
x1 = (int)(x1*StepsPerMillimeterX);
y1 = (int)(y1*StepsPerMillimeterY);
float x0 = Xpos;
float y0 = Ypos;
// Let's find out the change for the coordinates
long dx = abs(x1-x0);
long dy = abs(y1-y0);
int sx = x0<x1 ? StepInc : -StepInc;
int sy = y0<y1 ? StepInc : -StepInc;
long i;
long over = 0;
if (dx > dy) {
for (i=0; i<dx; ++i) {
myStepperX.step(sx);
over+=dy;
if (over>=dx) {
over-=dx;
myStepperY.step(sy);
}
delay(StepDelay);
}
}
else {
for (i=0; i<dy; ++i) {
myStepperY.step(sy);
over+=dx;
if (over>=dy) {
over-=dy;
myStepperX.step(sx);
}
delay(StepDelay);
}
}
if (verbose)
{
Serial.print("dx, dy:");
Serial.print(dx);
Serial.print(",");
Serial.print(dy);
Serial.println("");
}
if (verbose)
{
Serial.print("Going to (");
Serial.print(x0);
Serial.print(",");
Serial.print(y0);
Serial.println(")");
}
delay(LineDelay);
Xpos = x1;
Ypos = y1;
}
void penUp() {
penServo.write(penZUp);
delay(LineDelay);
Zpos=Zmax;
if (verbose) {
Serial.println("Pen up!");
}
}
void penDown() {
penServo.write(penZDown);
delay(LineDelay);
Zpos=Zmin;
if (verbose) {
Serial.println("Pen down.");
}
}
import java.awt.event.KeyEvent;
import javax.swing.JOptionPane;
import processing.serial.*;
Serial port = null;
// select and modify the appropriate line for your operating system
// leave as null to use interactive port (press 'p' in the program)
String portname = null;
//String portname = Serial.list()[0]; // Mac OS X
//String portname = "/dev/ttyUSB0"; // Linux
//String portname = "COM6"; // Windows
boolean streaming = false;
float speed = 0.001;
String[] gcode;
int i = 0;
void openSerialPort()
{
if (portname == null) return;
if (port != null) port.stop();
port = new Serial(this, portname, 9600);
port.bufferUntil('\n');
}
void selectSerialPort()
{
String result = (String) JOptionPane.showInputDialog(frame,
"Select the serial port that corresponds to your Arduino board.",
"Select serial port",
JOptionPane.QUESTION_MESSAGE,
null,
Serial.list(),
0);
if (result != null) {
portname = result;
openSerialPort();
}
}
void setup()
{
size(600, 400);
openSerialPort();
}
void draw()
{
background(155);
fill(0);
int y = 24, dy = 12;
text("INSTRUCTIONS", 12, y); y += dy;
text("p: select serial port", 12, y); y += dy;
text("1: set speed to 0.001 inches (1 mil) per jog", 12, y); y += dy;
text("2: set speed to 0.010 inches (10 mil) per jog", 12, y); y += dy;
text("3: set speed to 0.100 inches (100 mil) per jog", 12, y); y += dy;
text("arrow keys: jog in x-y plane", 12, y); y += dy;
text("page up & page down: jog in z axis", 12, y); y += dy;
text("$: display grbl settings", 12, y); y+= dy;
text("h: go home", 12, y); y += dy;
text("0: zero machine (set home to the current location)", 12, y); y += dy;
text("g: stream a g-code file", 12, y); y += dy;
text("x: stop streaming g-code (this is NOT immediate)", 12, y); y += dy;
y = height - dy;
text("current jog speed: " + speed + " inches per step", 12, y); y -= dy;
text("current serial port: " + portname, 12, y); y -= dy;
}
void keyPressed()
{
if (key == '1') speed = 0.001;
if (key == '2') speed = 0.01;
if (key == '3') speed = 0.1;
if (!streaming) {
if (keyCode == LEFT) port.write("G91\nG20\nG00 X-" + speed + " Y0.000 Z0.000\n");
if (keyCode == RIGHT) port.write("G91\nG20\nG00 X" + speed + " Y0.000 Z0.000\n");
if (keyCode == UP) port.write("G91\nG20\nG00 X0.000 Y" + speed + " Z0.000\n");
if (keyCode == DOWN) port.write("G91\nG20\nG00 X0.000 Y-" + speed + " Z0.000\n");
if (keyCode == KeyEvent.VK_PAGE_UP) port.write("G91\nG20\nG00 X0.000 Y0.000 Z" + speed + "\n");
if (keyCode == KeyEvent.VK_PAGE_DOWN) port.write("G91\nG20\nG00 X0.000 Y0.000 Z-" + speed + "\n");
if (key == 'h') port.write("G90\nG20\nG00 X0.000 Y0.000 Z0.000\n");
if (key == 'v') port.write("$0=75\n$1=74\n$2=75\n");
//if (key == 'v') port.write("$0=100\n$1=74\n$2=75\n");
if (key == 's') port.write("$3=10\n");
if (key == 'e') port.write("$16=1\n");
if (key == 'd') port.write("$16=0\n");
if (key == '0') openSerialPort();
if (key == 'p') selectSerialPort();
if (key == '$') port.write("$$\n");
}
if (!streaming && key == 'g') {
gcode = null; i = 0;
File file = null;
println("Loading file...");
selectInput("Select a file to process:", "fileSelected", file);
}
if (key == 'x') streaming = false;
}
void fileSelected(File selection) {
if (selection == null) {
println("Window was closed or the user hit cancel.");
} else {
println("User selected " + selection.getAbsolutePath());
gcode = loadStrings(selection.getAbsolutePath());
if (gcode == null) return;
streaming = true;
stream();
}
}
void stream()
{
if (!streaming) return;
while (true) {
if (i == gcode.length) {
streaming = false;
return;
}
if (gcode[i].trim().length() == 0) i++;
else break;
}
println(gcode[i]);
port.write(gcode[i] + '\n');
i++;
}
void serialEvent(Serial p)
{
String s = p.readStringUntil('\n');
println(s.trim());
if (s.trim().startsWith("ok")) stream();
if (s.trim().startsWith("error")) stream(); // XXX: really?
}


{kind=link}
Comments