

Hardware components | ||||||
 |
| × | 3 | |||
 |
| × | 1 | |||
 |
| × | 8 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
Software apps and online services | ||||||
| ||||||
 |
| |||||
 |
| |||||
 |
| |||||
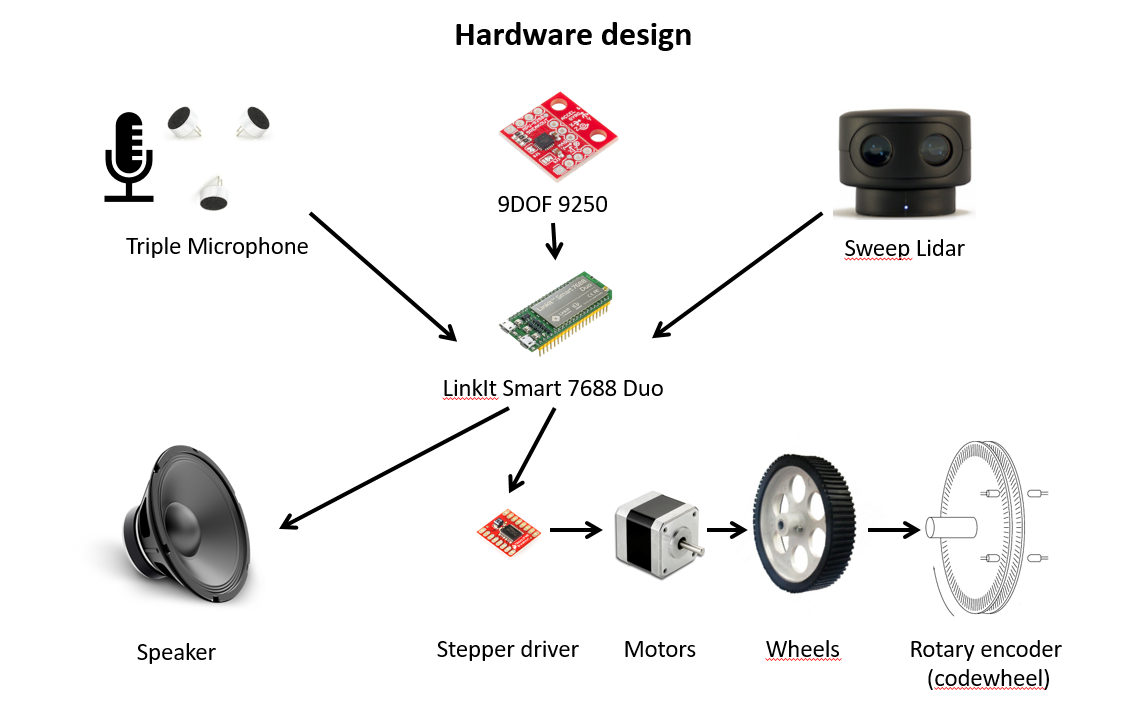
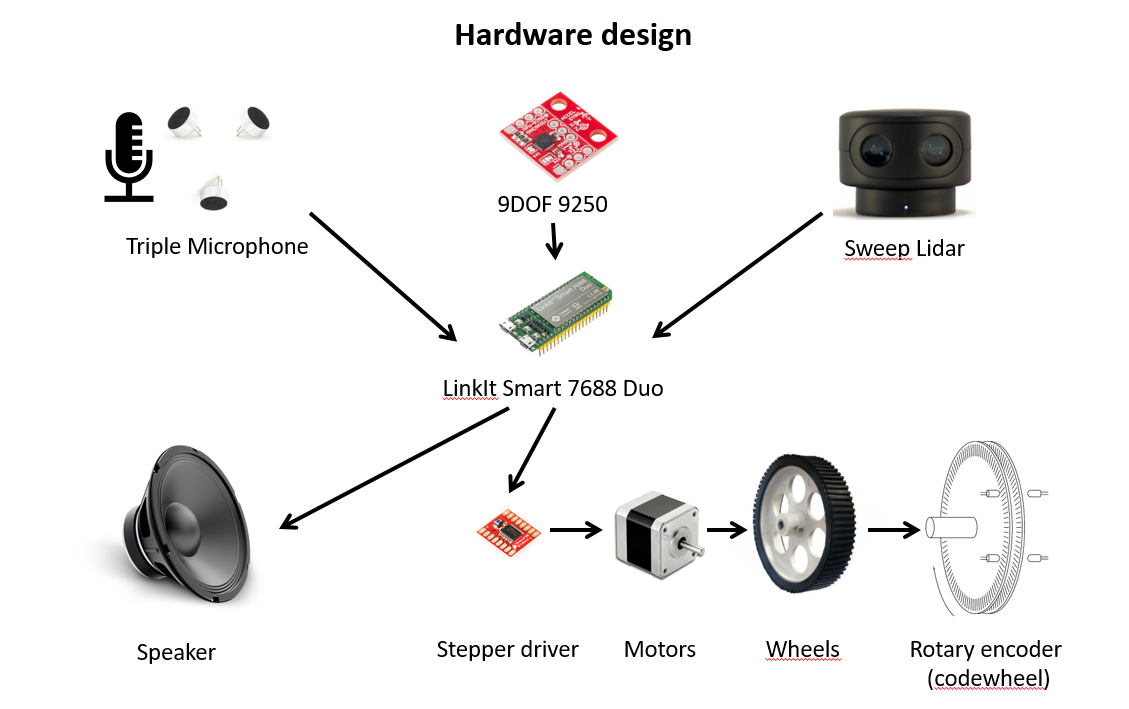
The project is to make an autonomous driving robot commanded by voice.
Inputs:- LIDAR 360°
- 9 DOF IMU
- Triple Microphone
- Rotary encoder
- PPM to drive motors
- Speaker
- Use foreign API to achieve voice recognition and speaking. Using the high level data to understand commands.
- Use wheels to move
- Use inputs to "locate" itself in space and the triple microphone allows it to know where the commands are coming from.








_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments