My project is the assembly of an inspection drone or rover, equipped with FPV circuit and with the RSL10-SENSE-DB-GEVK sensor module.
I decided to do this project because I observed the use of various types of drones, aerial or terrestrial, in disaster relief activities and monitoring of industrial and commercial installations.
Generally, these drones are used where the human being is life threatened or does not have access to the places.
The implementation of sensors on these drones is very complicated and expensive; preventing the use of such equipment in some cases.
I noticed that the characteristics of the reduced physical structure of the RSL10-SENSE-DB-GEVK sensor module with several high-tech sensors would make it feasible to adapt it to an inspection or rescue drone or rover, regardless of other technologies in the equipment, with little impact in weight, as well as the use of independent battery.
This adaptation would add more functionality to the drone operator, increasing the responsiveness, be it saving or monitoring.
The assembled rover is a prototype, controlled by radio frequency of 433 mhz and works like any other similar inspection equipment.
During a monitoring or inspection, the rover operator has access to images and information about the location, such as temperature, brightness, air quality and humidity, as well as images.
First I did the rover design, using FreeCAD, version 0.18.
In a second moment, I printed the parts of the rover on Creality's Ender-3 3D printer.
With the set Tamiya 70157 Universal Plate Set, 2 pieces and the set of wheels and would be Tamiya, I set up the structure.
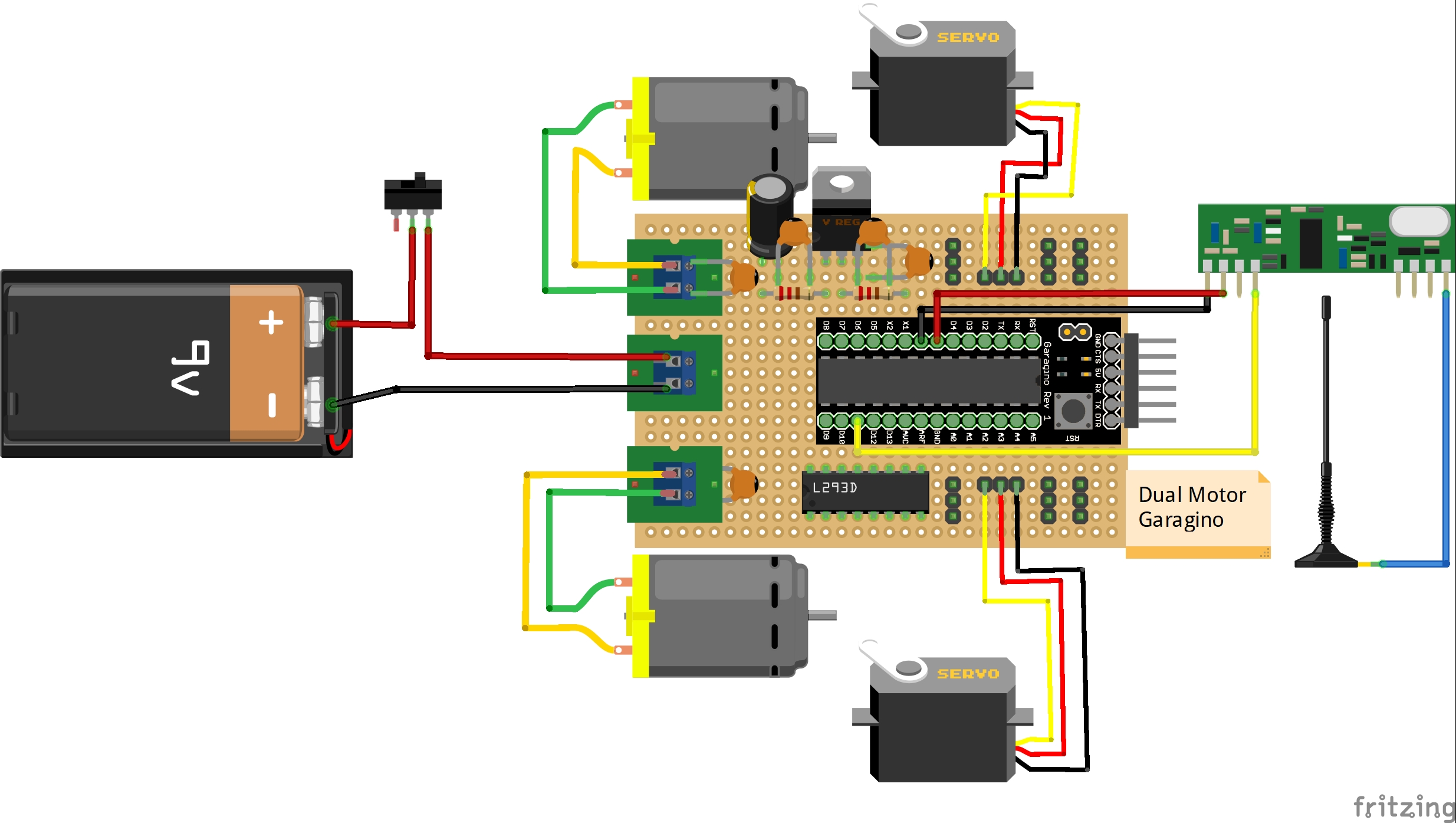
Later I set up the electronics, with the Garagino, Dual Motor Garagino the FPV camera and the FPV image transmitter.
I configured the radio transmitter and receiver on the Garagino and the image transmitter and receiver on a Samsung tablet.
The RSL10-SENSE-DB-GEVK sensor module was configured on a Motorola cell phone, installing the RSL10 Sense and Control v 1.0.3 app from ON Semiconductor Corp.












{kind=link}
{kind=link}
Comments