

Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
For about 4 years I have been developing a robot for mapping environment, it could be a labyrinth, finding a predetermined exit or point.
Robot vision
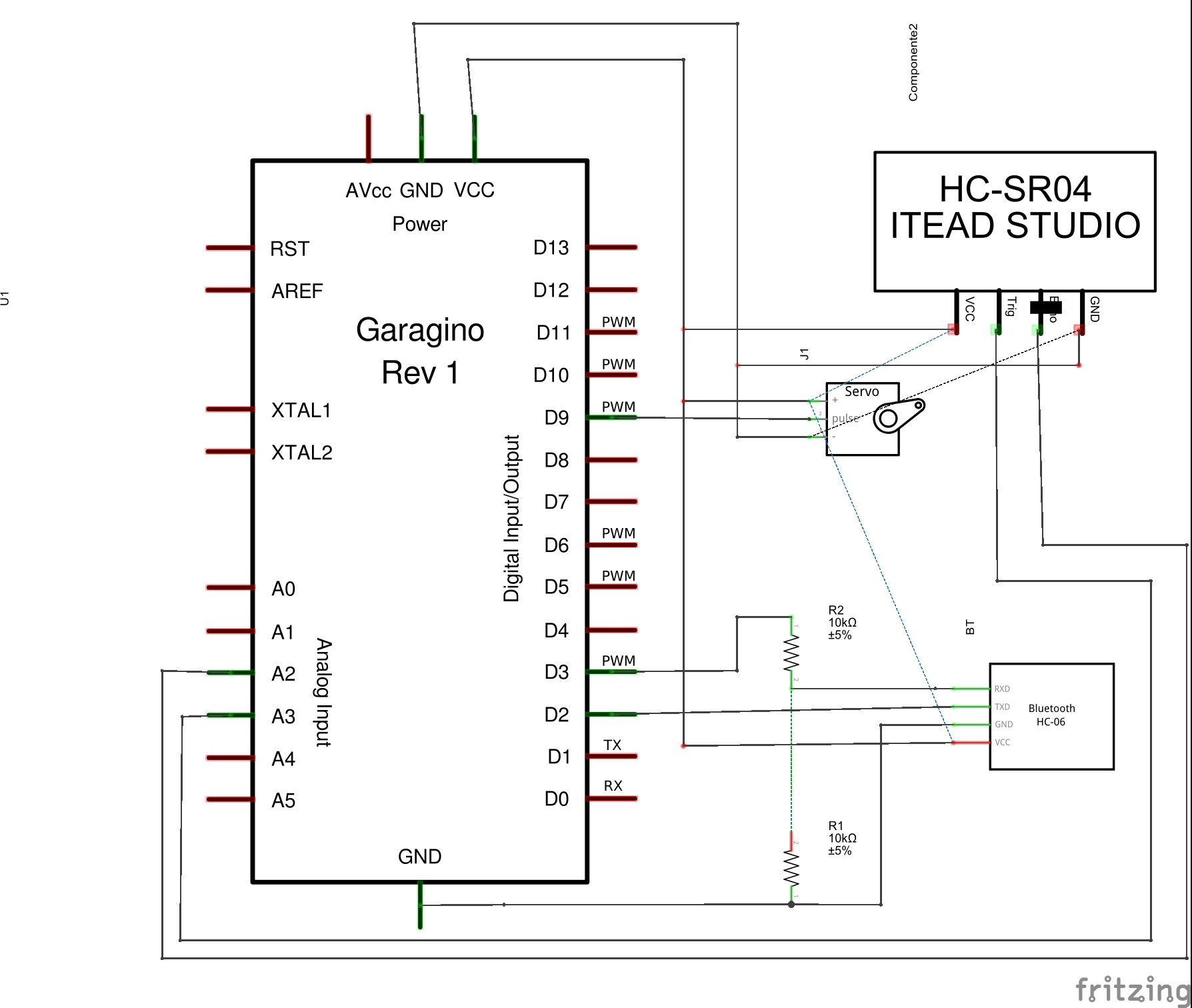
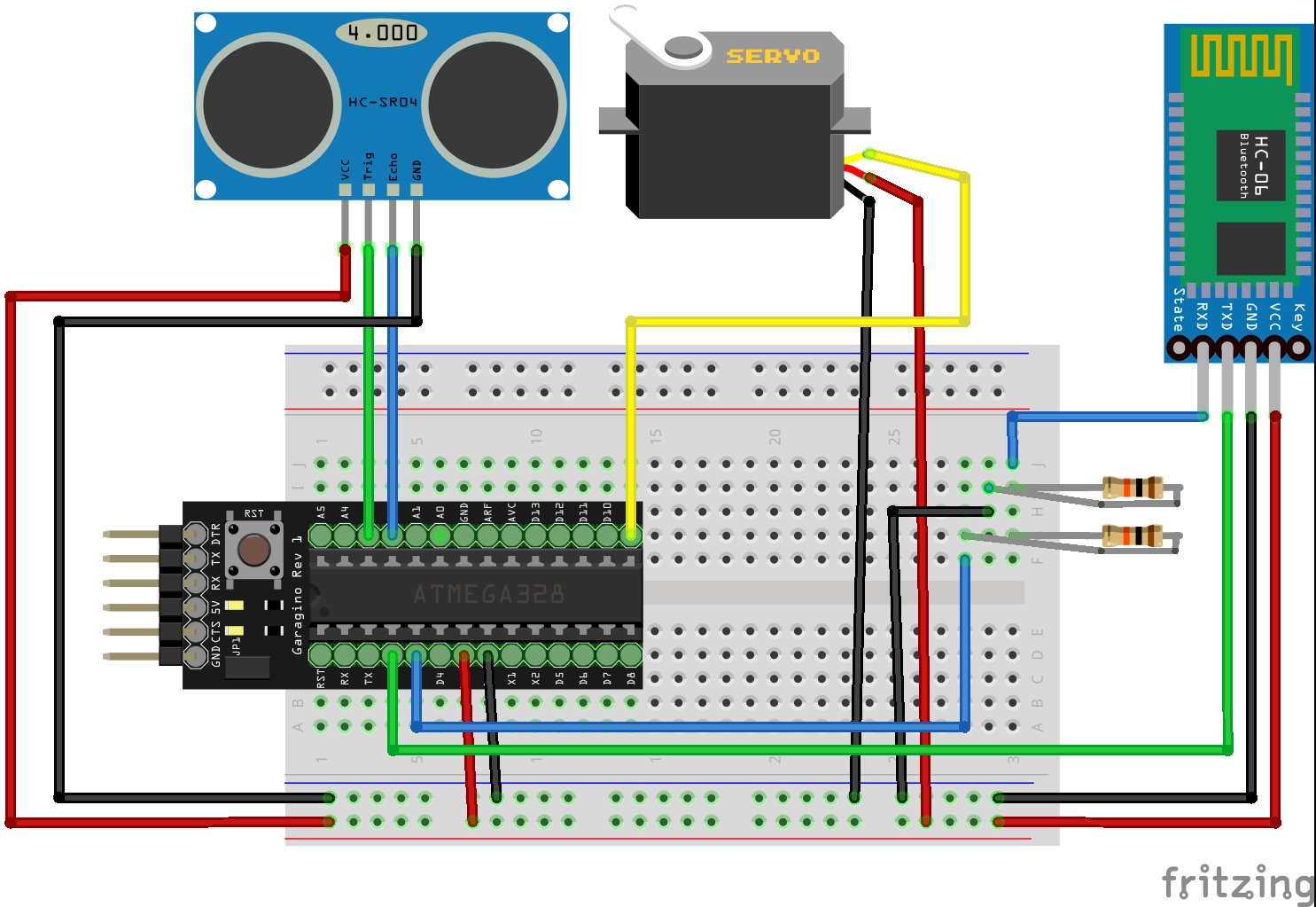
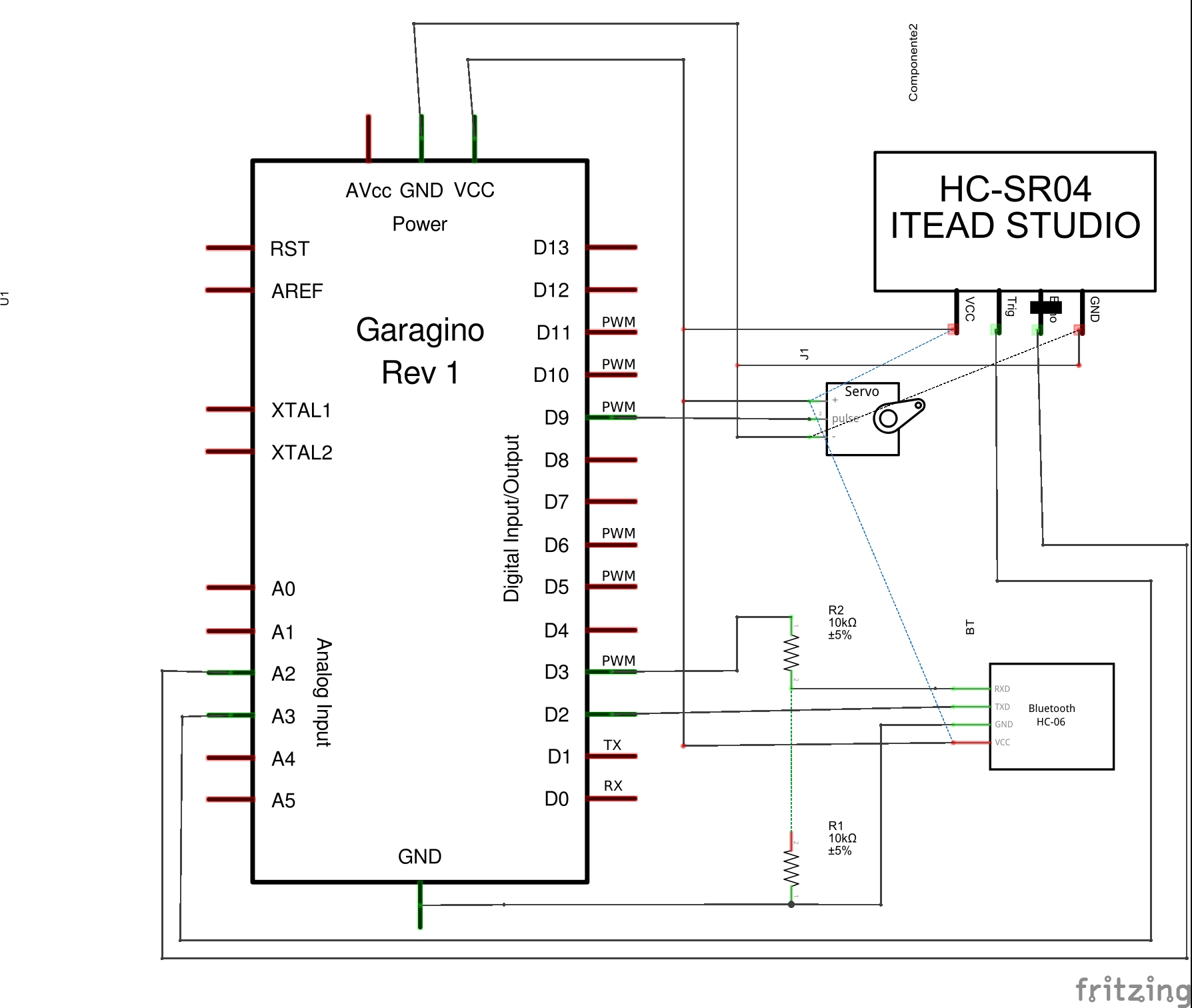
One of the modules is the obstacle sensor. Ultrasonic Ultrasonic Sensor Sensor HC-SR04 moved by a Micro Servo Motor SG90.
Obstacle Sensor Module
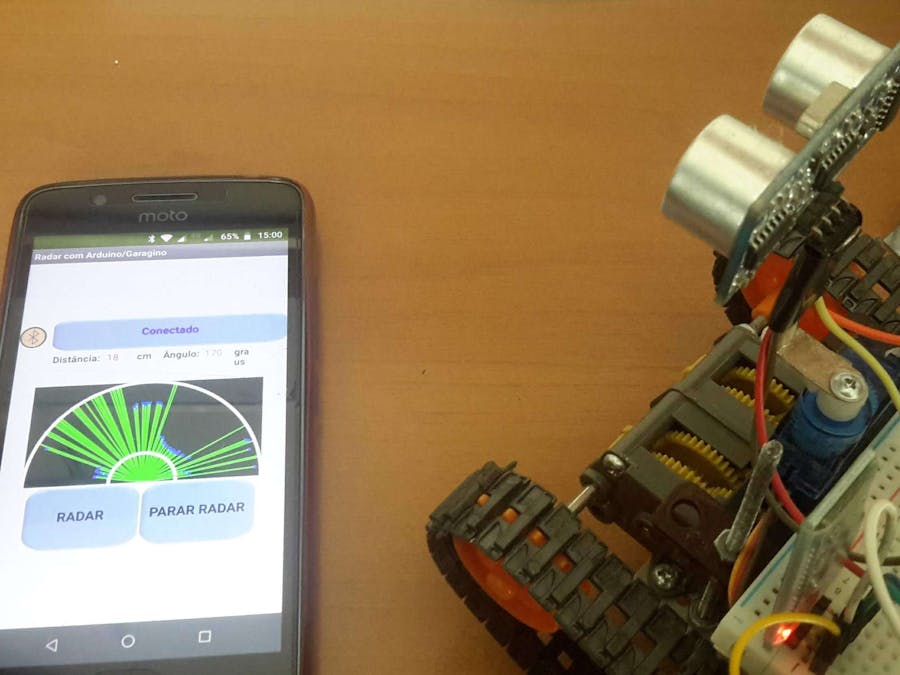
To communicate the robot with my cell phone, I used the RS232 Bluetooth Module - HC-06.
Communication with the phone
I developed an Arduino Sketch to move the radar and read the sensor. This Outline communicates with an App, developed in App Inventor 2.

4 projects • 5 followers
I have electronics and computer as a hobby. I like to build and create things as well as solve logic problems


{kind=link}
{kind=link}
Comments