






Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
This project was built as the final deliverable for our Embedded System course.
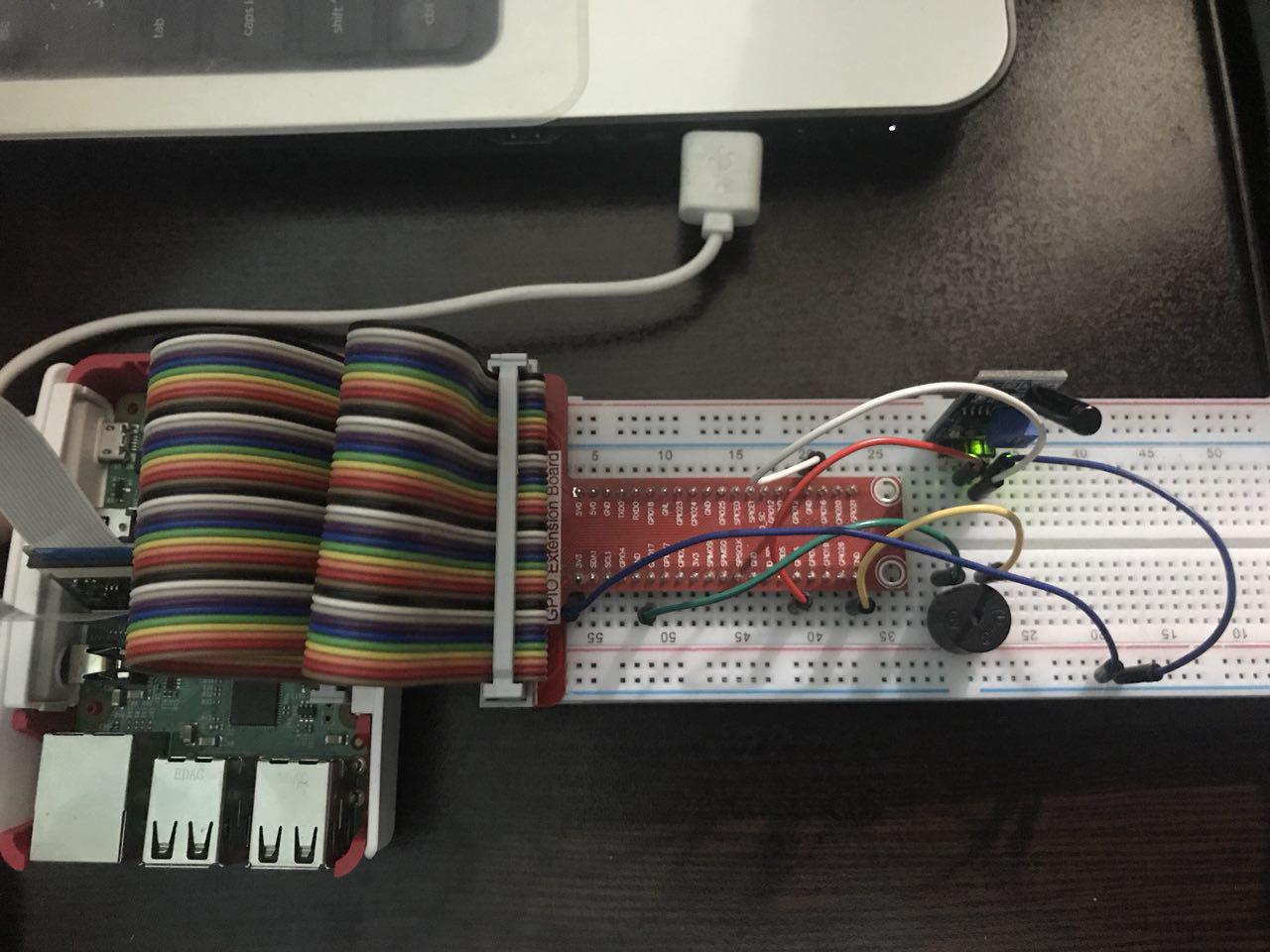
IntroductionWe use several modules and a raspberry Pi and we implement this project in such a way that when it hit our car, the active alert and, with the activation of the camera's alarm from around the car, take a picture of our robot telegram that Let's know about it already
Module Function Module:
The first module is the Impact Module. This module is blownsensitively and is cut off as soon as the vibration and shock of the outputsignal is broken. It has four bases That one vcc gnd do correspond to thevoltage and ground and the signal and( ao ) this base is also not used.
Module two is a broscher. This module has a positive base toconnect to the signal. There is a ground base that connects to the ground.
There is a third module of the camera that connects directlyto the raspberrypi and activates and captures a specific command.
The final part of the robot is a telegram that sends a camera shot image to a robot that has a specific token and a special chat id that distinguishes this robot from other robots.
photo_2018-02-05_23-12-20_z7kYrLVoxc.jpg
Module two is a broscher. This module has a positive base to connect to the signal. There is a ground base that connects to the ground.
There is a third module of the camera that connects directly to the raspberrypi and activates and captures a specific command.
The final part of the robot is a telegram that sends a camera shot image to a robot that has a specific token and a special chat id that distinguishes this robot from other robots.
{kind=link}




Comments