#include <SoftReset.h>
#include <SparkFunLIS3DH.h>
#include <Wire.h>
#include <SPI.h>
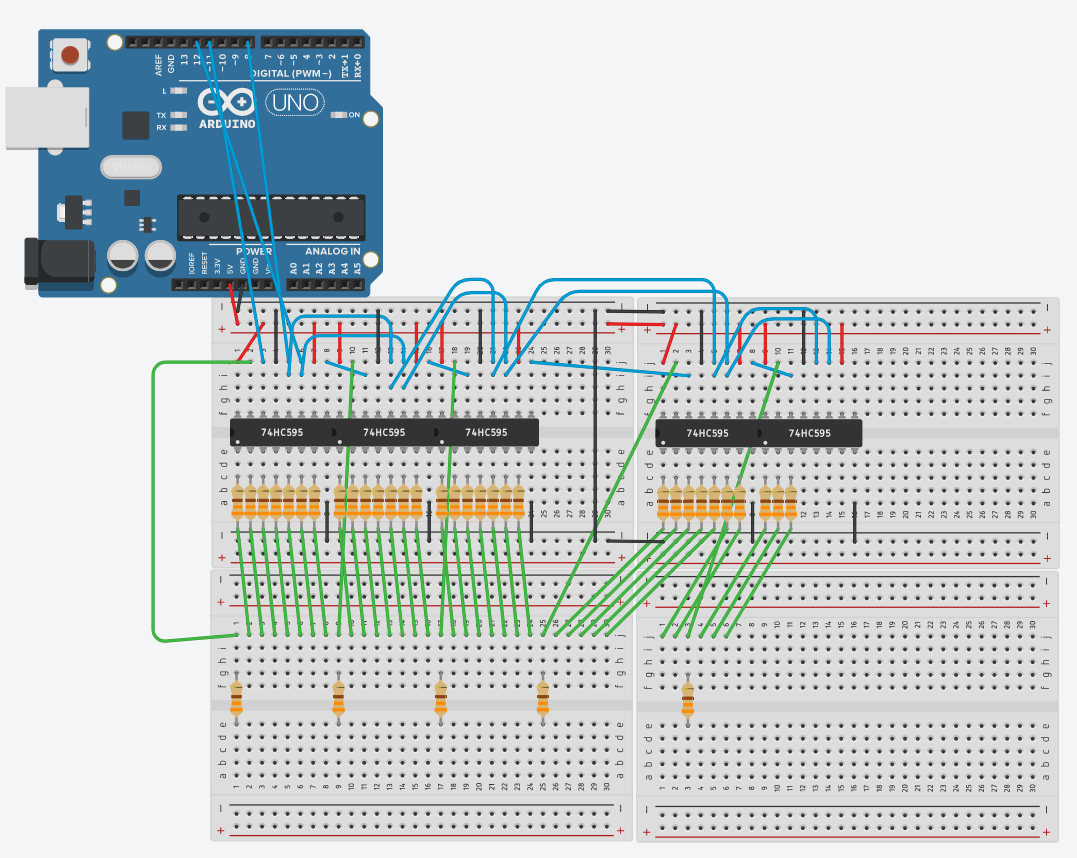
//Pin connected to ST_CP of 74HC595
int latchPin = 8;
//Pin connected to SH_CP of 74HC595
int clockPin = 12;
////Pin connected to DS of 74HC595
int dataPin = 11;
int j = 0;
int mode = 0;
int blinkBtn = 4;
int waveBtn = 2;
int loopBtn = 3;
int masterSwitch = 5;
int blinkBtnState, waveBtnState, loopBtnState, masterState;
int speedPot = A0;
int speedValue = 0;
int master = 0;
int buzzer = 9;
LIS3DH myIMU;
int reset = 6;
//holders for infromation you're going to pass to shifting function
byte waveOne, waveTwo, waveThree, waveFour, waveFive, loopOne, loopTwo, loopThree, loopFour, loopFive;
byte waveDataOne[16], waveDataTwo[16], waveDataThree[16], waveDataFour[16], waveDataFive[16];
byte loopDataOne[10], loopDataTwo[10], loopDataThree[10], loopDataFour[10], loopDataFive[10];
void setup() {
digitalWrite(reset, HIGH);
delay(200);
pinMode(reset, OUTPUT);
//set pins to output because they are addressed in the main loop
pinMode(latchPin, OUTPUT);
pinMode(blinkBtn, INPUT_PULLUP);
pinMode(waveBtn, INPUT_PULLUP);
pinMode(loopBtn, INPUT_PULLUP);
pinMode(buzzer, OUTPUT);
pinMode(masterSwitch, INPUT_PULLUP);
myIMU.begin();
Serial.begin(9600);
MCUSR = 0;
loopDataOne[0] = 1;
loopDataOne[1] = 3;
loopDataOne[2] = 6;
loopDataOne[3] = 12;
loopDataOne[4] = 24;
loopDataOne[5] = 48;
loopDataOne[6] = 96;
loopDataOne[7] = 192;
loopDataOne[8] = 128;
loopDataOne[9] = 0;
loopDataTwo[0] = 2;
loopDataTwo[1] = 6;
loopDataTwo[2] = 12;
loopDataTwo[3] = 24;
loopDataTwo[4] = 48;
loopDataTwo[5] = 96;
loopDataTwo[6] = 192;
loopDataTwo[7] = 128;
loopDataTwo[8] = 1;
loopDataTwo[9] = 1;
loopDataThree[0] = 8;
loopDataThree[1] = 24;
loopDataThree[2] = 48;
loopDataThree[3] = 96;
loopDataThree[4] = 192;
loopDataThree[5] = 128;
loopDataThree[6] = 0;
loopDataThree[7] = 1;
loopDataThree[8] = 3;
loopDataThree[9] = 6;
loopDataFour[0] = 4;
loopDataFour[1] = 12;
loopDataFour[2] = 24;
loopDataFour[3] = 48;
loopDataFour[4] = 224;
loopDataFour[5] = 193;
loopDataFour[6] = 3;
loopDataFour[7] = 2;
loopDataFour[8] = 2;
loopDataFour[9] = 2;
loopDataFive[0] = 0;
loopDataFive[1] = 0;
loopDataFive[2] = 0;
loopDataFive[3] = 0;
loopDataFive[4] = 0;
loopDataFive[5] = 1;
loopDataFive[6] = 3;
loopDataFive[7] = 6;
loopDataFive[8] = 12;
loopDataFive[9] = 8;
waveDataOne[0] = 56;
waveDataOne[1] = 124;
waveDataOne[2] = 198;
waveDataOne[3] = 131;
waveDataOne[4] = 1;
waveDataOne[5] = 0;
waveDataOne[6] = 0;
waveDataOne[7] = 0;
waveDataOne[8] = 0;
waveDataOne[9] = 0;
waveDataOne[10] = 0;
waveDataOne[11] = 0;
waveDataOne[12] = 0;
waveDataOne[13] = 0;
waveDataOne[14] = 0;
waveDataOne[15] = 0;
waveDataTwo[0] = 0;
waveDataTwo[1] = 0;
waveDataTwo[2] = 0;
waveDataTwo[3] = 1;
waveDataTwo[4] = 25;
waveDataTwo[5] = 60;
waveDataTwo[6] = 102;
waveDataTwo[7] = 194;
waveDataTwo[8] = 128;
waveDataTwo[9] = 0;
waveDataTwo[10] = 0;
waveDataTwo[11] = 0;
waveDataTwo[12] = 0;
waveDataTwo[13] = 0;
waveDataTwo[14] = 0;
waveDataTwo[15] = 0;
waveDataThree[0] = 0;
waveDataThree[1] = 0;
waveDataThree[2] = 0;
waveDataThree[3] = 0;
waveDataThree[4] = 0;
waveDataThree[5] = 0;
waveDataThree[6] = 0;
waveDataThree[7] = 4;
waveDataThree[8] = 7;
waveDataThree[9] = 251;
waveDataThree[10] = 248;
waveDataThree[11] = 0;
waveDataThree[12] = 0;
waveDataThree[13] = 0;
waveDataThree[14] = 0;
waveDataThree[15] = 0;
waveDataFour[0] = 0;
waveDataFour[1] = 0;
waveDataFour[2] = 0;
waveDataFour[3] = 0;
waveDataFour[4] = 0;
waveDataFour[5] = 0;
waveDataFour[6] = 0;
waveDataFour[7] = 0;
waveDataFour[8] = 0;
waveDataFour[9] = 0;
waveDataFour[10] = 1;
waveDataFour[11] = 3;
waveDataFour[12] = 114;
waveDataFour[13] = 248;
waveDataFour[14] = 140;
waveDataFour[15] = 4;
waveDataFive[0] = 0;
waveDataFive[1] = 0;
waveDataFive[2] = 0;
waveDataFive[3] = 0;
waveDataFive[4] = 0;
waveDataFive[5] = 0;
waveDataFive[6] = 0;
waveDataFive[7] = 0;
waveDataFive[8] = 0;
waveDataFive[9] = 0;
waveDataFive[10] = 0;
waveDataFive[11] = 0;
waveDataFive[12] = 3;
waveDataFive[13] = 4;
waveDataFive[14] = 12;
waveDataFive[15] = 8;
}
void loop() {
//Read button states and analog value
blinkBtnState = digitalRead(blinkBtn);
waveBtnState = digitalRead(waveBtn);
loopBtnState = digitalRead(loopBtn);
masterState = digitalRead(masterSwitch);
speedValue = analogRead(speedPot);
speedValue = speedValue / 3;
Serial.println(speedValue);
//Prevents lights from flashing too fast to avoid epilepsy
if(speedValue < 30)
speedValue = 30;
//Checks if button is clicked and then changes mode appropriately
if(masterState == LOW)
{
master = 1;
}
else
{
master = 0;
turnOff();
digitalWrite(reset, LOW);
}
if(blinkBtnState == LOW)
{
mode = 1;
}
if(waveBtnState == LOW)
{
mode = 2;
}
if(loopBtnState == LOW)
{
mode = 3;
}
//Beeps at a certain frequency when enclosure is rotated too much
if(myIMU.readFloatAccelX() > 0.5 || myIMU.readFloatAccelX() < -0.5 || myIMU.readFloatAccelY() > 0.5 || myIMU.readFloatAccelY() < -0.5)
{
tone(buzzer,350,100);
}
//Runs led modes based on current mode
if(mode == 1 && master == 1)
{
if(speedValue < 150)
speedValue = 150;
blinkLeds(speedValue);
}
if(mode == 2 && master == 1)
{
colorWave(speedValue);
}
if(mode == 3 && master == 1)
{
loopLetters(speedValue);
}
}
//LEDs light up by columns, two at a time from left to right
void colorWave(int d)
{
if(j==16)
j=0;
waveOne = waveDataOne[j];
waveTwo = waveDataTwo[j];
waveThree = waveDataThree[j];
waveFour = waveDataFour[j];
waveFive = waveDataFive[j];
//ground latchPin and hold low for as long as you are transmitting
digitalWrite(latchPin, 0);
//move 'em out
shiftOut(dataPin, clockPin, waveFive);
shiftOut(dataPin, clockPin, waveFour);
shiftOut(dataPin, clockPin, waveThree);
shiftOut(dataPin, clockPin, waveTwo);
shiftOut(dataPin, clockPin, waveOne);
//return the latch pin high to signal chip that it
//no longer needs to listen for information
digitalWrite(latchPin, 1);
j++;
delay(d);
}
//LEDs make a trail and loop each letter individually
void loopLetters(int d)
{
if(j==10)
j=0;
loopOne = loopDataOne[j];
loopTwo = loopDataTwo[j];
loopThree = loopDataThree[j];
loopFour = loopDataFour[j];
loopFive = loopDataFive[j];
//ground latchPin and hold low for as long as you are transmitting
digitalWrite(latchPin, 0);
//move 'em out
shiftOut(dataPin, clockPin, loopFive);
shiftOut(dataPin, clockPin, loopFour);
shiftOut(dataPin, clockPin, loopThree);
shiftOut(dataPin, clockPin, loopTwo);
shiftOut(dataPin, clockPin, loopOne);
//return the latch pin high to signal chip that it
//no longer needs to listen for information
digitalWrite(latchPin, 1);
j++;
delay(d);
}
void turnOff()
{
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, 0);
shiftOut(dataPin, clockPin, 0);
shiftOut(dataPin, clockPin, 0);
shiftOut(dataPin, clockPin, 0);
shiftOut(dataPin, clockPin, 0);
digitalWrite(latchPin, 1);
}
//blinks the whole register based on the number of times you want to
//blink "n" and the pause between them "d"
//starts with a moment of darkness to make sure the first blink
//has its full visual effect.
void blinkLeds(int d)
{
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, 255);
shiftOut(dataPin, clockPin, 255);
shiftOut(dataPin, clockPin, 255);
shiftOut(dataPin, clockPin, 255);
shiftOut(dataPin, clockPin, 255);
digitalWrite(latchPin, 1);
delay(d);
digitalWrite(latchPin, 0);
shiftOut(dataPin, clockPin, 0);
shiftOut(dataPin, clockPin, 0);
shiftOut(dataPin, clockPin, 0);
shiftOut(dataPin, clockPin, 0);
shiftOut(dataPin, clockPin, 0);
digitalWrite(latchPin, 1);
delay(d);
}
// the heart of the program
void shiftOut(int myDataPin, int myClockPin, byte myDataOut)
{
// This shifts 8 bits out MSB first,
//on the rising edge of the clock,
//clock idles low
//internal function setup
int i=0;
int pinState;
pinMode(myClockPin, OUTPUT);
pinMode(myDataPin, OUTPUT);
//clear everything out just in case to
//prepare shift register for bit shifting
digitalWrite(myDataPin, 0);
digitalWrite(myClockPin, 0);
//for each bit in the byte myDataOut�
//NOTICE THAT WE ARE COUNTING DOWN in our for loop
//This means that %00000001 or "1" will go through such
//that it will be pin Q0 that lights.
for (i=7; i>=0; i--)
{
digitalWrite(myClockPin, 0);
//if the value passed to myDataOut and a bitmask result
// true then... so if we are at i=6 and our value is
// %11010100 it would the code compares it to %01000000
// and proceeds to set pinState to 1.
if ( myDataOut & (1<<i) )
{
pinState= 1;
}
else
{
pinState= 0;
}
//Sets the pin to HIGH or LOW depending on pinState
digitalWrite(myDataPin, pinState);
//register shifts bits on upstroke of clock pin
digitalWrite(myClockPin, 1);
//zero the data pin after shift to prevent bleed through
digitalWrite(myDataPin, 0);
}
//stop shifting
digitalWrite(myClockPin, 0);
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments