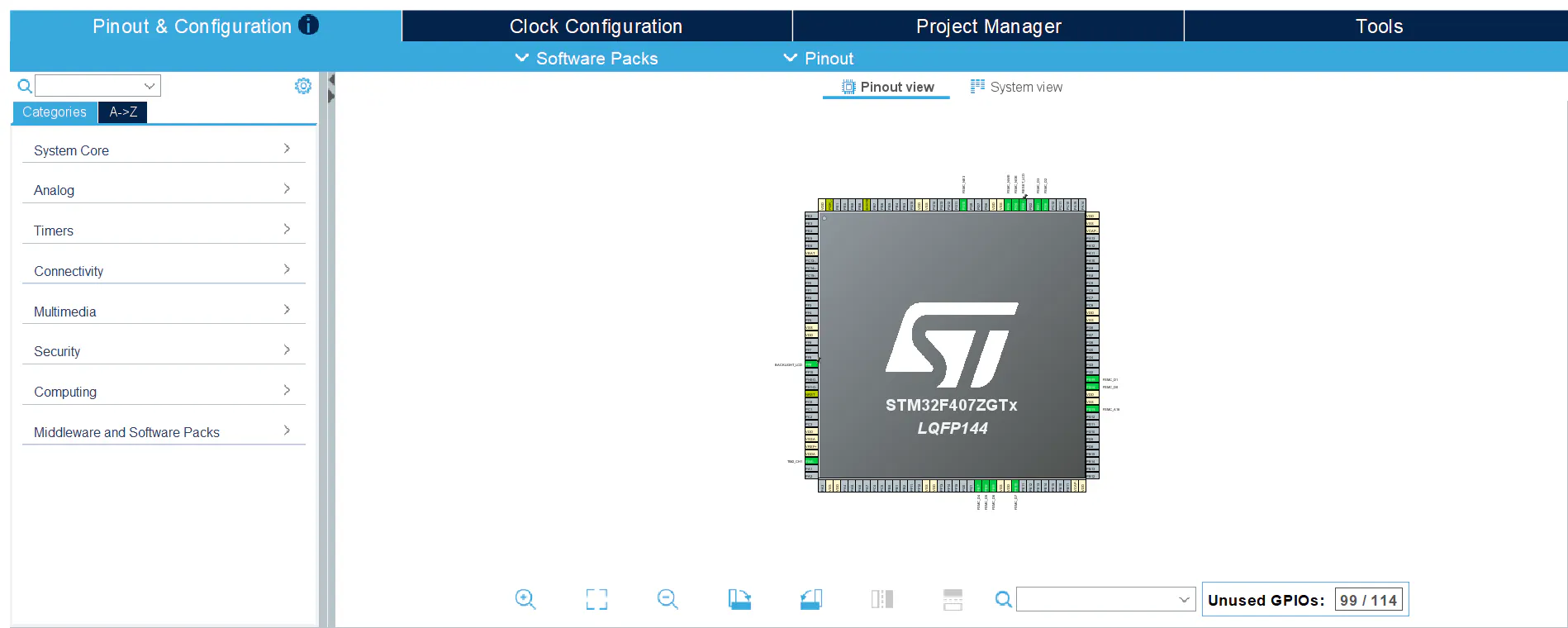
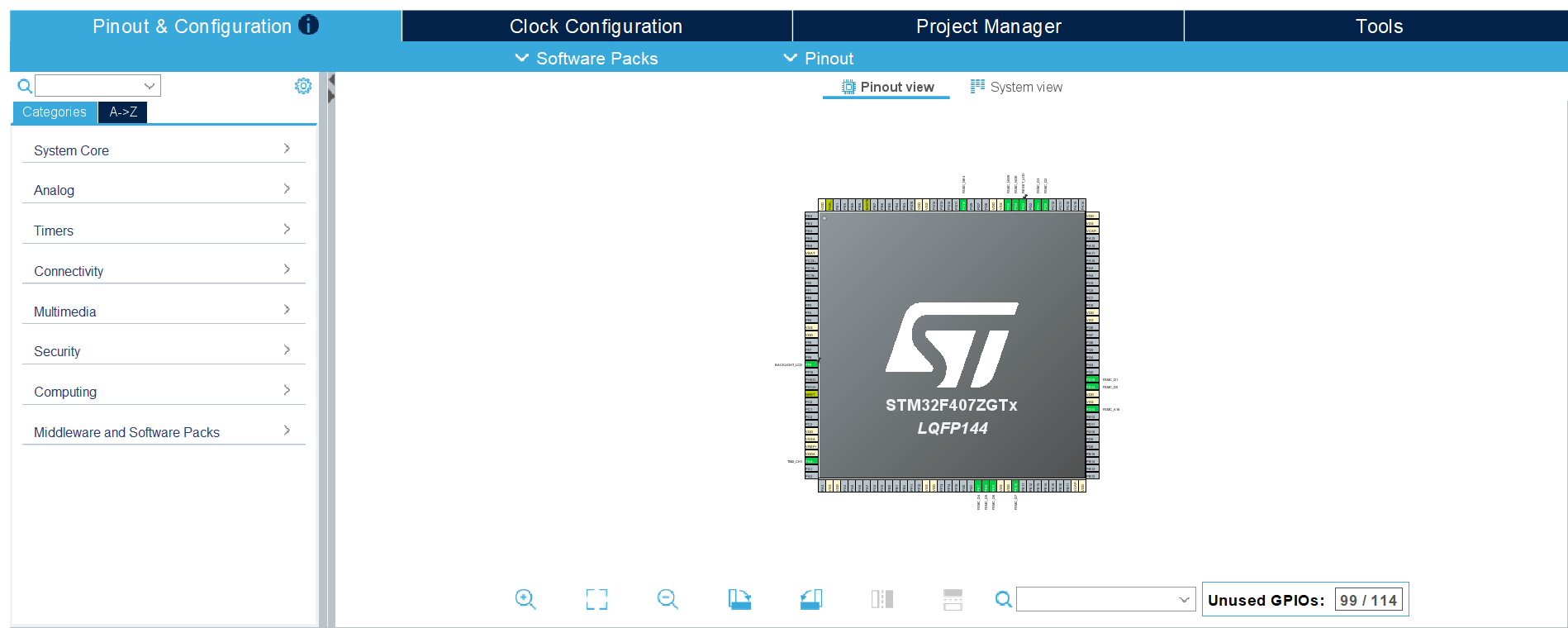
INTRODUCTION:I made a real-time digital clock for this project that shows the amount of time that has passed and flashes a fading LED once every second. I set up an STM32F407ZGTx microcontroller on my RT-Thread RT-Spark Development Board to cause a hardware timer interrupt per millisecond using STM32CubeMX. I divided the work into two sections: the main code loop and a background interrupt (ISR) to ensure the project ran smoothly. In addition to tracking the hours, minutes, seconds, and milliseconds, the ISR uses PWM (Pulse Width Modulation) to gradually reduce an LED's brightness from 100% to 0% over a period of 600 milliseconds. In the meantime, the main loop uses zero-padded formatting to safely read the time variables and display them on an LCD module while waiting for an update flag supplied by the ISR every 100 milliseconds.
Materials:- RT-Thread RT-Spark Development Board
- LCD Module:
- LEDs:
- Logic Analyzer or Oscilloscope:
Software:
My experience during actual experiment








{kind=link}
Comments