Mentor Mitra AI : Edge-Powered Robotic Mentor for Kids
Mentor Mitra AI — Live Demonstration & System Walkthrough
YouTube video showcasing Mentor Mitra AI — system overview, live interaction, and edge-AI capabilities
What Is Mentor Mitra AI?
Mentor Mitra AI is a privacy-first, edge-powered robotic companion designed to act as a child’s mentor, friend, and adaptive learning partner. It is not a toy, and it is not a cloud chatbot disguised as one. Mentor Mitra is a fully embodied AI system that lives entirely within your home, runs on hardware you control, and keeps a child’s data exactly where it belongs: offline and private.
At its core, Mentor Mitra AI operates using locally hosted artificial intelligence, including a self-hosted large language model (LLaMA 3.2B parameters) running on a dedicated on-premises server. No conversations are uploaded, no emotions are analyzed in the cloud, and no learning profiles are shared with third parties.
Image showing 2nd place win at the Elecrow Electronic Design Contest (Mentor Mitra V1)
Mentor Mitra began as an experimental idea and quickly gained recognition in national and international innovation forums. Early validation came when Mentor Mitra V1 secured 2nd position in the Elecrow Electronic Design Contest, reinforcing the technical and conceptual strength of the project.
Note: This repository primarily documents Mentor Mitra V2, the evolved and significantly enhanced version of the system.
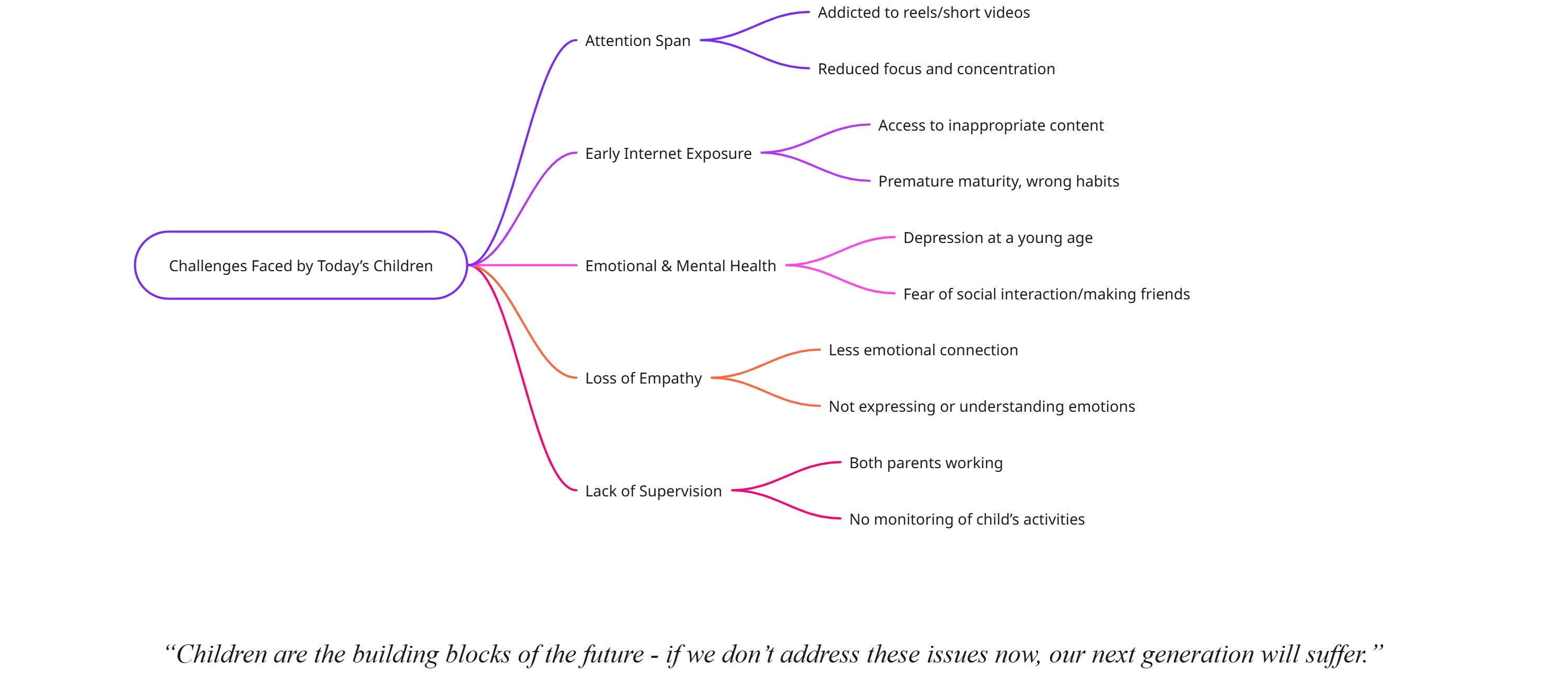
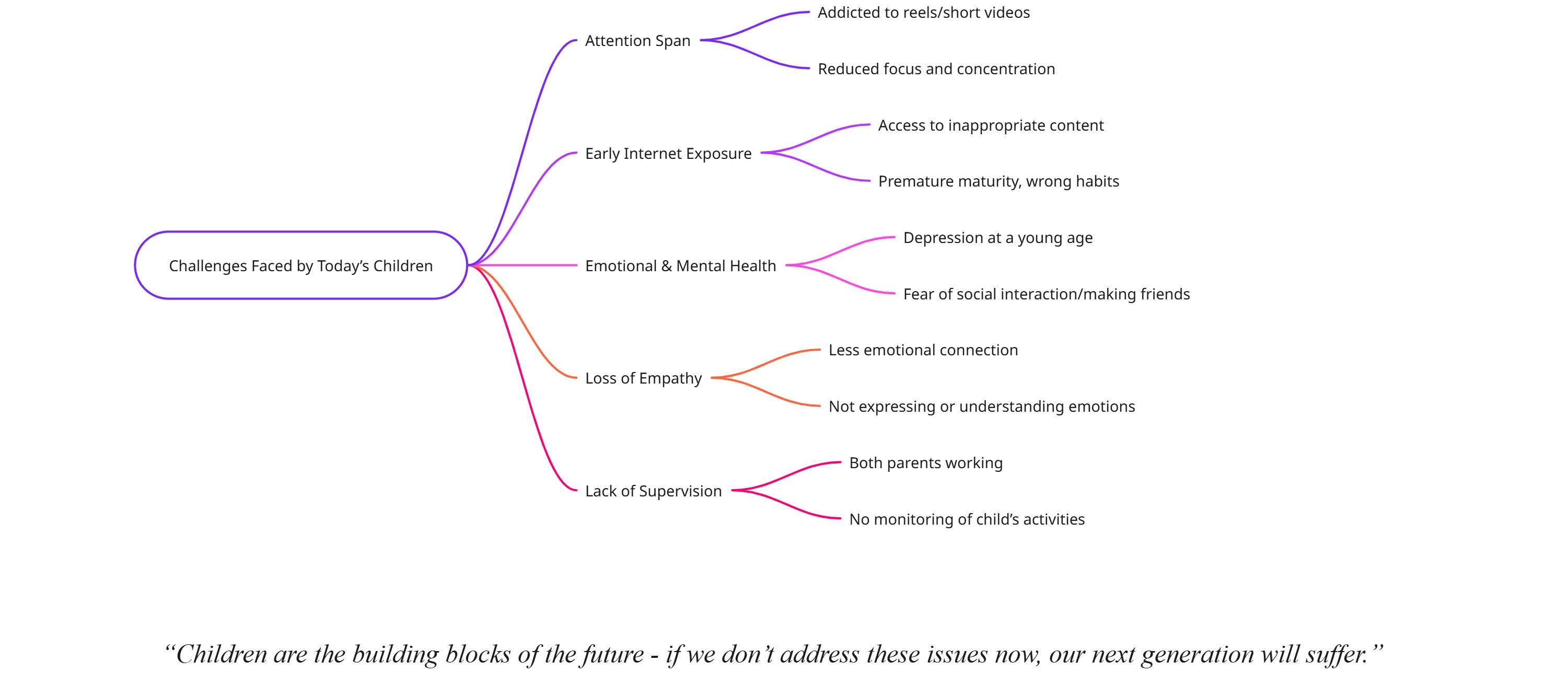
Why We Built It
Mentor Mitra began with a simple but powerful realization:Children need more than screens. They need understanding.
As generative AI advanced rapidly, most solutions became increasingly cloud-dependent—raising serious concerns around privacy, latency, reliability, and control, especially for children.
Mentor Mitra was built on three core beliefs:
Privacy First: A child’s emotions and learning data should never leave the home
Intelligence at the Edge: Edge hardware is powerful enough to run modern AI locally
Embodied Learning: Physical presence creates deeper engagement and trust
Evolution of Mentor Mitra (7-Month Development Journey)
Mentor Mitra — 7 Months of Iterative Development (V1 → V2)
Image showing the evolution of Mentor Mitra over the last 7 months — hardware, architecture, embodiment
Over seven months, Mentor Mitra evolved from a basic embedded prototype into a fully embodied, multimodal, privacy-preserving AI system, incorporating robotics, vision, voice, and emotion intelligence.
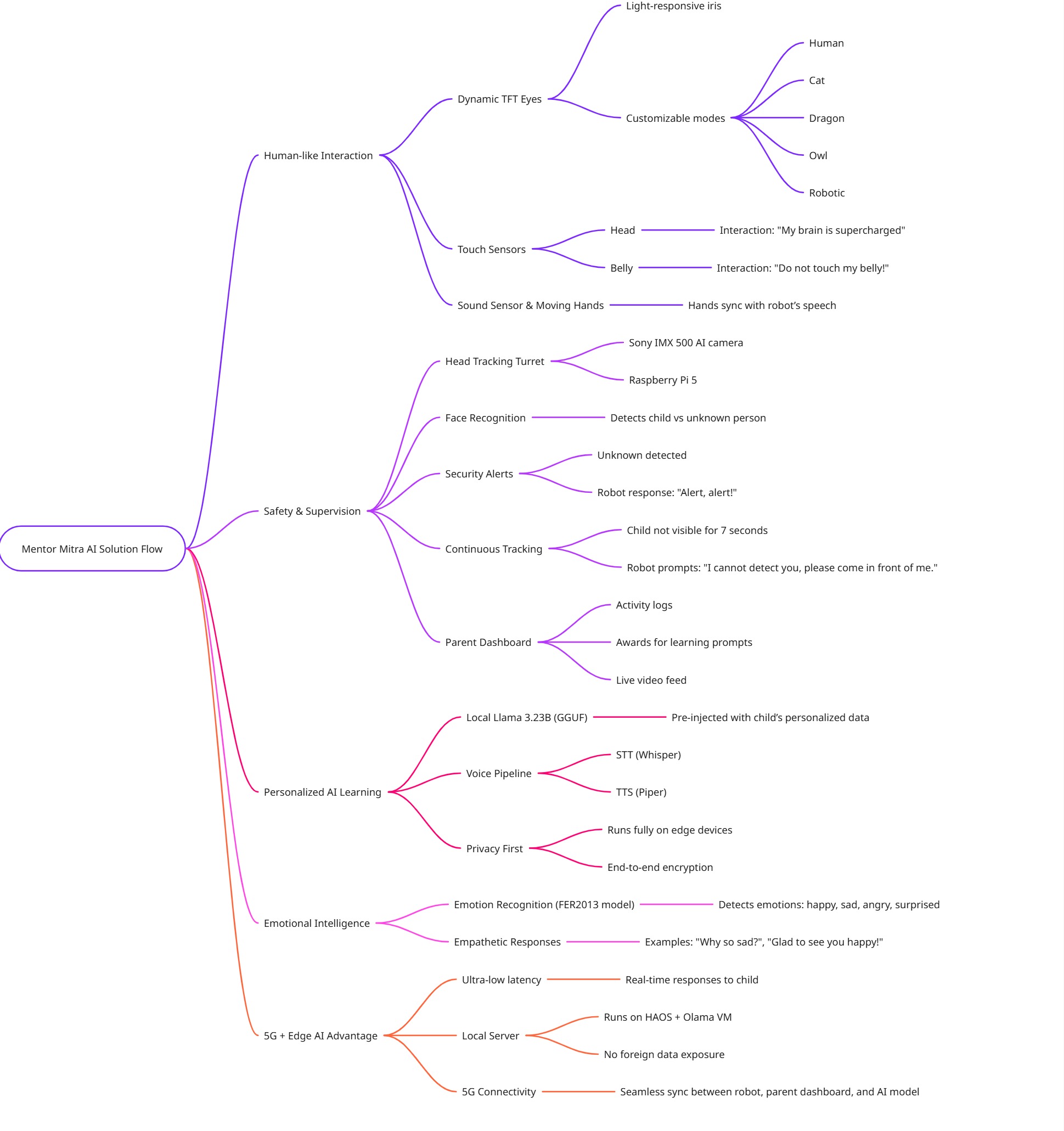
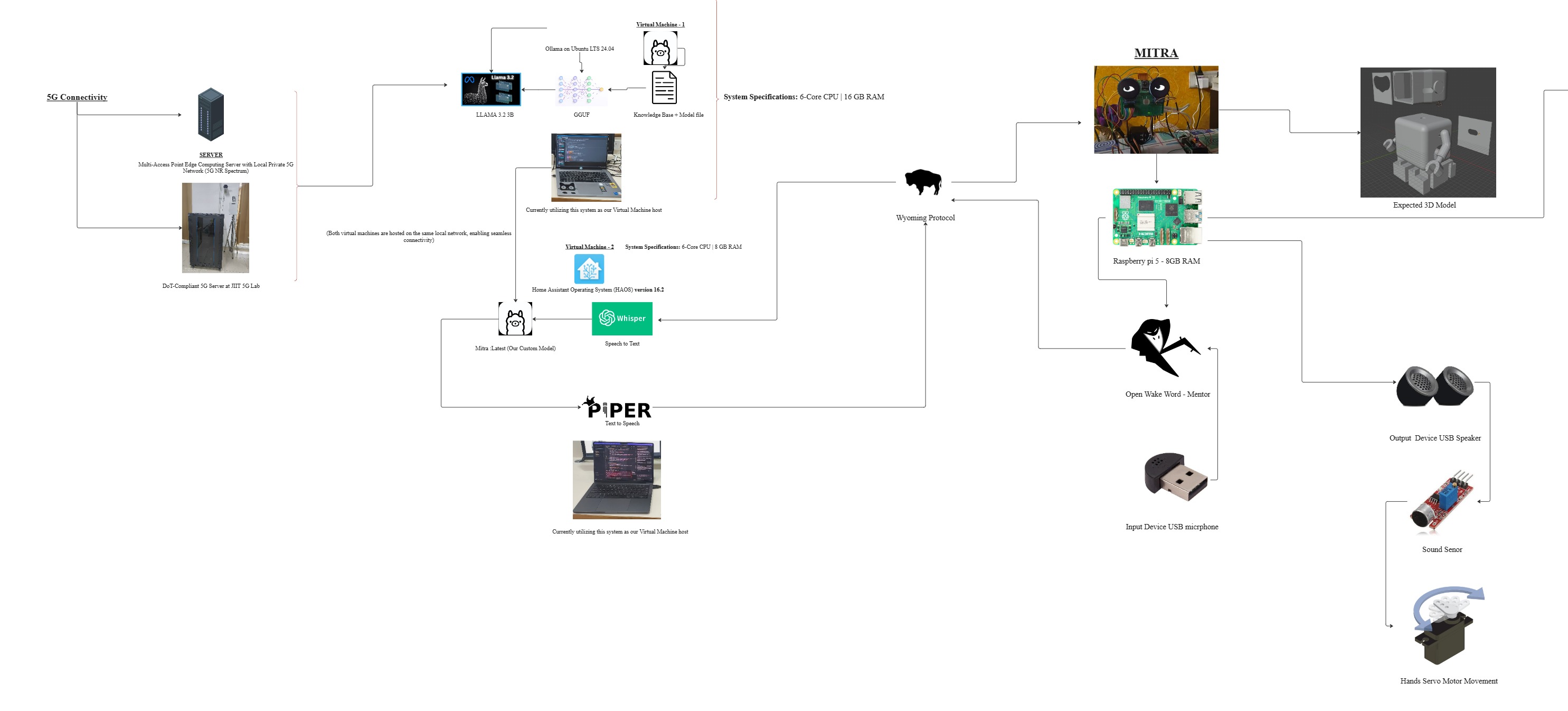
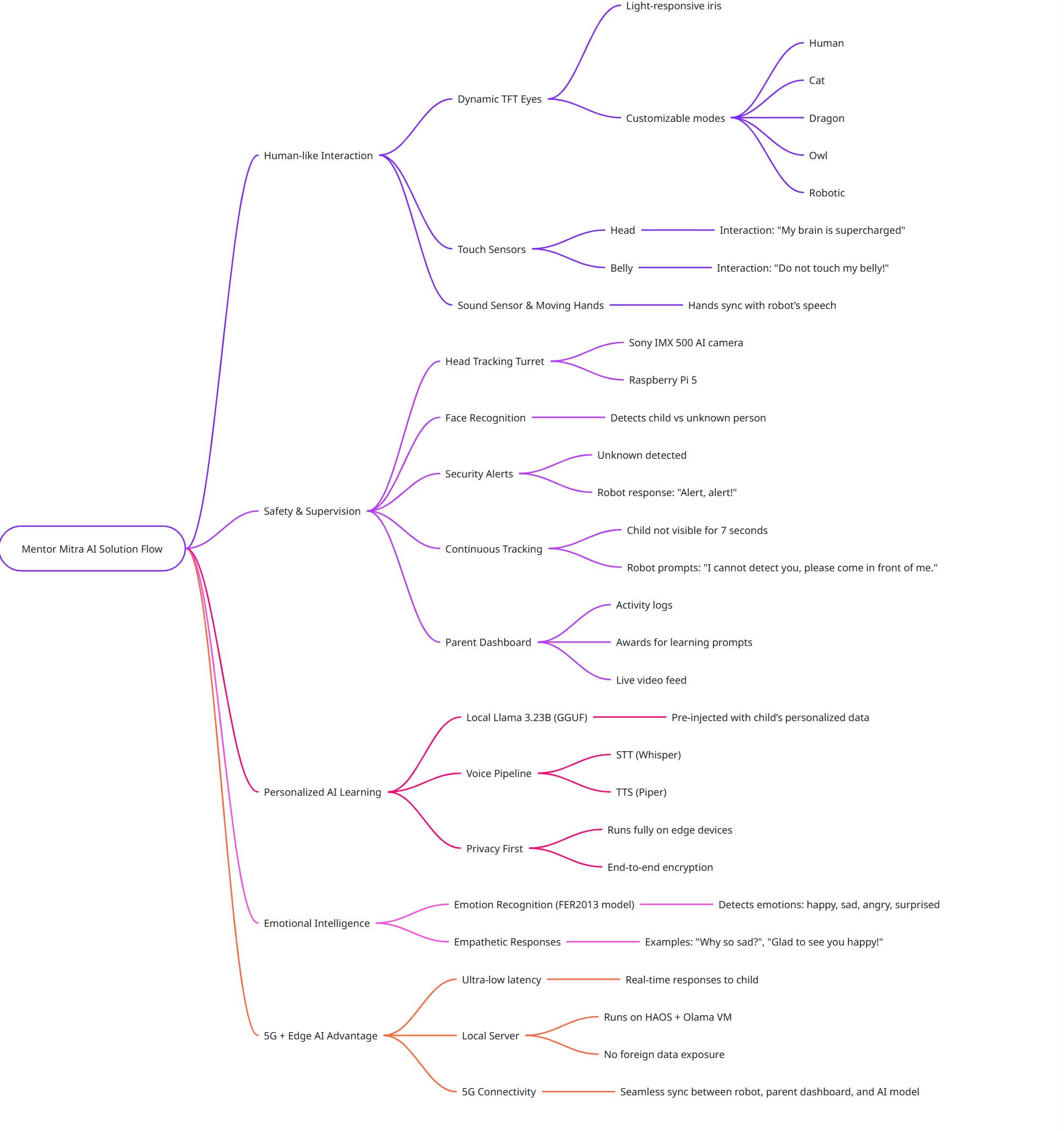
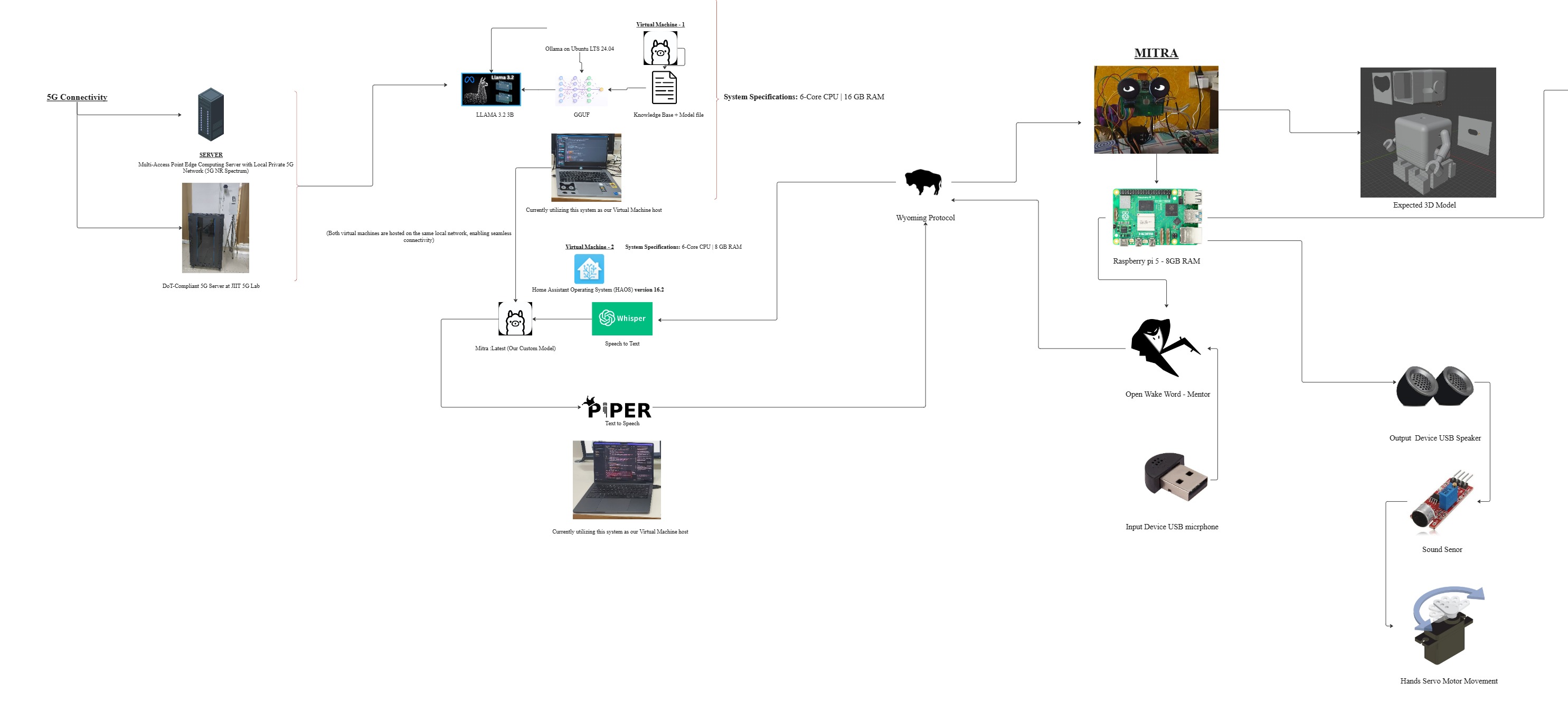
How Mentor Mitra AI Works
Mentor Mitra AI is structured across three tightly integrated layers:
Image showing LinkedIn reach, reactions, impressions, and engagement
Mentor Mitra AI sparked strong engagement across professional and maker communities, validating the growing interest in privacy-first edge AI and robotics.
Achievements Timeline
Mentor Mitra AI — Recognition & Milestones Timeline
Timeline image showing key milestones, prizes, and recognitions
Key highlights include:
E-Toycathon 2025 — 2nd Position (C-DAC, MeitY, Govt. of India)
5G Hackathon Pragati — Top 50 Nationwide (DoT, India)
₹1, 00, 000 + ₹1, 00, 000 seed funding
India Mobile Congress 2025 Fin
Media & Public Spotlight
Mentor Mitra AI — Media & Public Showcase
Image showing media mentions, event showcases, or public demonstrations
Mentor Mitra AI has been demonstrated across government innovation forums, hackathons, and public exhibitions, highlighting the real-world viability of edge AI in education.
Why This Project Matters
Mentor Mitra AI challenges the assumption that all intelligence must live in the cloud. It demonstrates that:
Edge AI is production-ready
Privacy and intelligence are not trade-offs
Emotionally aware AI can exist without surveillance
Robotics and AI become meaningful when thoughtfully integrated
Vision Forward
Mentor Mitra AI represents the intersection of:
Embedded Systems
Edge AI
Human–Robot Interaction
Educational Technology
Privacy-First Design
Future directions include deeper emotion understanding, gesture-based interaction, multi-device collaboration, and institutional deployment.
Mentor Mitra AI
Because every child deserves a private, intelligent companion.
The head turret and hand movements are controlled by a single ESP32. Hand motion is driven by a sound sensor, while head turret tracking uses a master–slave setup: once the Raspberry Pi 5 detects a face, it sends tracking data via serial communication to the ESP32, which controls the Mentor Mitra head in a two-degree-of-freedom (2-DOF) system.
#include<ESP32Servo.h>// ----- Sound trigger config -----#define SOUND_SENSOR_PIN 18 // digital OUT from sound module (active LOW)unsignedlonglastEventMs=0;constunsignedlongrefractoryMs=300;// ignore retriggers within this window// ----- Servo objects -----ServopanServo;// Pan (GPIO12)ServotiltServo;// Tilt (GPIO13)ServoservoA;// Extra servo A (GPIO32)ServoservoB;// Extra servo B (GPIO33)// ----- GPIO assignments -----constintpanPin=12;// PanconstinttiltPin=13;// TiltconstintservoAPin=32;// extra 1constintservoBPin=33;// extra 2// ----- Center positions -----constintpanCenter=130;constinttiltCenter=80;// ----- Position tracking -----intcurrentPanAngle=90;intcurrentTiltAngle=90;// ----- Function declarations -----voidrunDemo();voidcenterServos();voidprocessCommand(Stringcommand);voidshowCommands();voidsmoothMove(Servo&servo,intstartAngle,intendAngle,int¤tPos,intdelayMs=15);voidsetup(){Serial.begin(115200);Serial.println("ESP32 4-Servo + Sound Controller Ready");// Sound inputpinMode(SOUND_SENSOR_PIN,INPUT_PULLUP);// Allocate timers and set servo frequencyESP32PWM::allocateTimer(0);ESP32PWM::allocateTimer(1);ESP32PWM::allocateTimer(2);ESP32PWM::allocateTimer(3);panServo.setPeriodHertz(50);tiltServo.setPeriodHertz(50);servoA.setPeriodHertz(50);servoB.setPeriodHertz(50);// Attach with explicit pulse widthspanServo.attach(panPin,500,2400);tiltServo.attach(tiltPin,500,2400);servoA.attach(servoAPin,500,2400);servoB.attach(servoBPin,500,2400);// Initialize at tracked positionspanServo.write(currentPanAngle);tiltServo.write(currentTiltAngle);servoA.write(0);servoB.write(0);Serial.println("Pins: Pan=GPIO12, Tilt=GPIO13, A=GPIO32, B=GPIO33; Sound=GPIO18 (LOW=event)");Serial.println("Enter 'help' for commands; sound will randomize A/B servos 090");}voidloop(){// ----- Sound-triggered random moves for servoA/servoB -----intsoundState=digitalRead(SOUND_SENSOR_PIN);// LOW = sound detectedunsignedlongnow=millis();if(soundState==LOW&&(now-lastEventMs)>refractoryMs){inta=random(0,91);// 0..90 inclusiveintb=random(0,91);servoA.write(a);servoB.write(b);Serial.print(" Sound! A=");Serial.print(a);Serial.print(", B=");Serial.print(b);Serial.println("");lastEventMs=now;}// ----- Serial command handling for pan/tilt -----if(Serial.available()){Stringcommand=Serial.readStringUntil('\n');command.trim();command.toLowerCase();if(command.length()>0){processCommand(command);}}delay(10);}// Smooth movement with position trackingvoidsmoothMove(Servo&servo,intstartAngle,intendAngle,int¤tPos,intdelayMs){if(startAngle==endAngle)return;intstep=(startAngle<endAngle)?1:-1;Serial.print("Moving: "+String(startAngle)+" "+String(endAngle)+" ");for(intangle=startAngle;angle!=endAngle+step;angle+=step){servo.write(angle);currentPos=angle;delay(delayMs);if(abs(angle-startAngle)%10==0)Serial.print(".");}Serial.println(" ");}voidrunDemo(){Serial.println(" [DEMO] Starting smooth 180x180 demonstration...");Serial.println(" Moving to start position (0, 0)");smoothMove(panServo,currentPanAngle,0,currentPanAngle,10);smoothMove(tiltServo,currentTiltAngle,0,currentTiltAngle,10);delay(1000);Serial.println(" Pan sweep: 0 180");smoothMove(panServo,currentPanAngle,180,currentPanAngle,12);delay(500);Serial.println(" Tilt sweep: 0 180");smoothMove(tiltServo,currentTiltAngle,180,currentTiltAngle,12);delay(500);Serial.println(" Pan return: 180 0");smoothMove(panServo,currentPanAngle,0,currentPanAngle,12);delay(500);Serial.println(" Tilt return: 180 0");smoothMove(tiltServo,currentTiltAngle,0,currentTiltAngle,12);delay(500);Serial.println(" [DEMO] Complete! Current position: Pan="+String(currentPanAngle)+", Tilt="+String(currentTiltAngle)+"");Serial.println();}voidcenterServos(){Serial.println(" [CENTER] Moving to center positions...");Serial.println(" Pan: "+String(currentPanAngle)+" "+String(panCenter)+"");Serial.println(" Tilt: "+String(currentTiltAngle)+" "+String(tiltCenter)+"");smoothMove(panServo,currentPanAngle,panCenter,currentPanAngle,15);smoothMove(tiltServo,currentTiltAngle,tiltCenter,currentTiltAngle,15);Serial.println(" [CENTER] Complete! Servos centered at Pan="+String(panCenter)+", Tilt="+String(tiltCenter)+"");Serial.println();}voidprocessCommand(Stringcommand){Serial.println(" Command received: '"+command+"'");if(command=="center"){centerServos();}elseif(command=="demo"){runDemo();}elseif(command.startsWith("pan ")){intangle=command.substring(4).toInt();if(angle>=0&&angle<=180){Serial.println(" [PAN] "+String(currentPanAngle)+" "+String(angle)+"");smoothMove(panServo,currentPanAngle,angle,currentPanAngle,15);Serial.println(" [PAN] Complete! Pan servo at "+String(angle)+"");}else{Serial.println(" ERROR: Pan angle must be 0-180");}}elseif(command.startsWith("tilt ")){intangle=command.substring(5).toInt();if(angle>=0&&angle<=180){Serial.println(" [TILT] "+String(currentTiltAngle)+" "+String(angle)+"");smoothMove(tiltServo,currentTiltAngle,angle,currentTiltAngle,15);Serial.println(" [TILT] Complete! Tilt servo at "+String(angle)+"");}else{Serial.println(" ERROR: Tilt angle must be 0-180");}}elseif(command.startsWith("both ")){intspaceIndex=command.indexOf(' ',5);if(spaceIndex>0){intpanAngle=command.substring(5,spaceIndex).toInt();inttiltAngle=command.substring(spaceIndex+1).toInt();if(panAngle>=0&&panAngle<=180&&tiltAngle>=0&&tiltAngle<=180){Serial.println(" [BOTH] Moving simultaneously:");Serial.println(" Pan: "+String(currentPanAngle)+" "+String(panAngle)+"");Serial.println(" Tilt: "+String(currentTiltAngle)+" "+String(tiltAngle)+"");intpanSteps=abs(panAngle-currentPanAngle);inttiltSteps=abs(tiltAngle-currentTiltAngle);intmaxSteps=max(panSteps,tiltSteps);if(maxSteps>0){Serial.print("Moving both servos ");for(intstep=0;step<=maxSteps;step++){intnewPanAngle=map(step,0,maxSteps,currentPanAngle,panAngle);intnewTiltAngle=map(step,0,maxSteps,currentTiltAngle,tiltAngle);panServo.write(newPanAngle);tiltServo.write(newTiltAngle);delay(15);if(step%10==0)Serial.print(".");}Serial.println(" ");currentPanAngle=panAngle;currentTiltAngle=tiltAngle;}Serial.println(" [BOTH] Complete! Pan="+String(panAngle)+", Tilt="+String(tiltAngle)+"");}else{Serial.println(" ERROR: Both angles must be 0-180");}}else{Serial.println(" ERROR: Usage: both <pan_angle> <tilt_angle>");}}elseif(command.startsWith("speed ")){intspeed=command.substring(6).toInt();if(speed>=5&&speed<=50){Serial.println(" [SPEED TEST] Testing with "+String(speed)+"ms delay");Serial.println(" Pan: 0 90 180 center");smoothMove(panServo,currentPanAngle,0,currentPanAngle,speed);smoothMove(panServo,currentPanAngle,90,currentPanAngle,speed);smoothMove(panServo,currentPanAngle,180,currentPanAngle,speed);smoothMove(panServo,currentPanAngle,panCenter,currentPanAngle,speed);Serial.println(" [SPEED TEST] Complete!");}else{Serial.println(" ERROR: Speed must be 5-50ms delay");}}elseif(command=="status"){Serial.println(" [STATUS] Current servo positions:");Serial.println(" Pan (GPIO12): "+String(currentPanAngle)+"");Serial.println(" Tilt (GPIO13): "+String(currentTiltAngle)+"");Serial.println(" Pan center: "+String(panCenter)+"");Serial.println(" Tilt center: "+String(tiltCenter)+"");}elseif(command=="help"||command=="commands"){showCommands();}else{Serial.println(" Unknown command: '"+command+"'");Serial.println(" Type 'help' for available commands");}Serial.println();}voidshowCommands(){Serial.println("");Serial.println(" AVAILABLE COMMANDS ");Serial.println("");Serial.println(" center - Move to center ");Serial.println(" demo - Run 180x180 demo ");Serial.println(" pan <angle> - Set pan (0-180) ");Serial.println(" tilt <angle> - Set tilt (0-180) ");Serial.println(" both <pan> <tilt> - Set both angles ");Serial.println(" speed <5-50> - Test speed ");Serial.println(" status - Show positions ");Serial.println(" help - Show this help ");Serial.println("");Serial.println();Serial.println("Examples:");Serial.println(" pan 90 Move pan to 90");Serial.println(" tilt 45 Move tilt to 45");Serial.println(" both 130 80 Move to center positions");Serial.println(" speed 10 Test with 10ms delay");Serial.println();}
Mentor Mitra V2 — Dual GC9A01 Eye Display
This repository hosts the Mentor Mitra V2 eyes displayed on two round GC9A01 displays, featuring default uncanny eyes and LDR integration
Child Emotion Recognition Module
Emotion recognition repositry used for predicting a child’s emotional state.
Child Face Recognition Module
Face recognition module used in Mentor Mitra to identify and track a child using Raspberry Pi and OpenCV.






















_p7Sr9etSVu.jpg)











{kind=link}
{kind=link}
{kind=link}
_p7Sr9etSVu.jpg){kind=link}
Comments