Background Climbing InformationRock climbing is an inherently dangerous sport. Nothing is safe about climbing on the edge of a cliff, with the possibility of falling off, which will certainly be fatal in most cases. As climbers, we can only ensure we are being as safe as possible with the equipment we use. The most efficient way of doing this is having another person to belay you as you're climbing. The idea is, you both have climbing harnesses and a rope connecting the two of you, which creates a simply pulley system with a fixed point on the wall to support the weight of the climber. This gives the belayer the opportunity to catch the climber if they were to fall, using a belay device attached to their harness.
Visualization of Belaying
Communication between the belayer and climber is crucial for the climber's safety, as their life is oftentimes in the belayer's hands. Our device is designed to aid in exactly that; the communication and safety between the climber and belayer. It can be tied onto the front of both their harnesses and is equipped with a microphone, speaker, accelerometer, and altimeter. This are implemented with hopes to allow communication between both devices, provide fall detection, and height readings of the climber. With the proper execution of the features discussed below, we hope to make climbing safer and further help with preventing dangerous, or possibly even fatal situations from occurring.
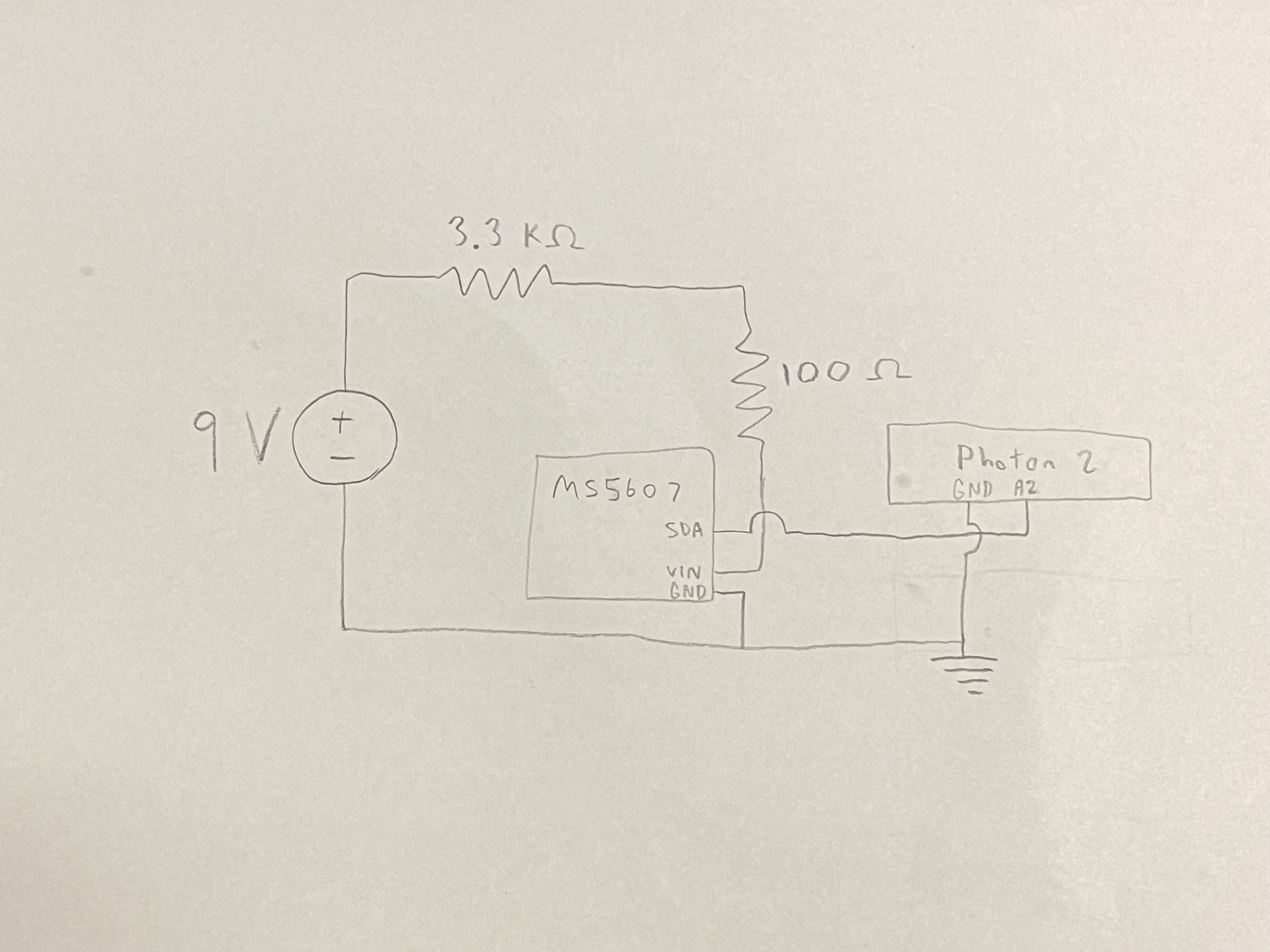
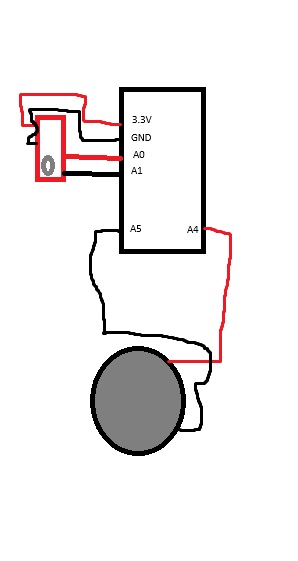
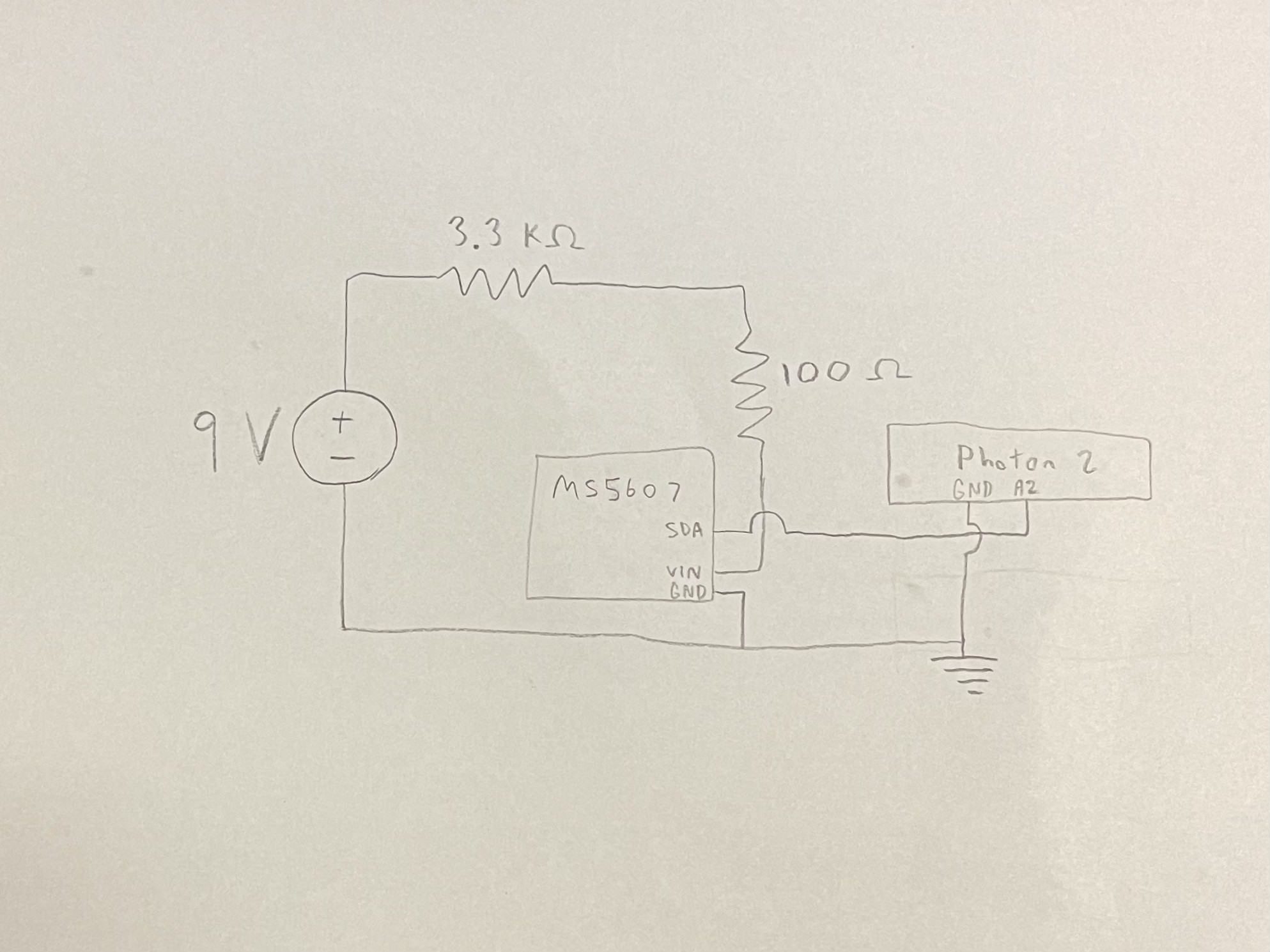
AltimeterThe altimeter is a Parallax MS5607 Altimeter Module. It is a local air pressure and temperature sensor. Since pressure changes with altitude, the altimeter can measure precise changes of pressure, in millibars, which can be put through an equation to convert the local pressure to altitude. This is done in a program loaded onto the Particle Photon 2. There are two photons on each device, which are connected to the same Wi-Fi signal. This provides the opportunity to communicate the value of the altitude to the belayer, which could be displayed on an LCD screen.
Microphone and SpeakerThe Microphone was chosen because there can be communication struggles while climbing. Sometimes while doing more rural climbing, a climber may find they need more or less slack in the rope, however if they are around a corner it may be hard for the other person to understand what they are saying. With this problem in mind, we have chosen to add a microphone and speaker to both boxes, in order to allow the climber to effectively and comfortably communicate their needs to the belayer without having to shout or compromise their safety.
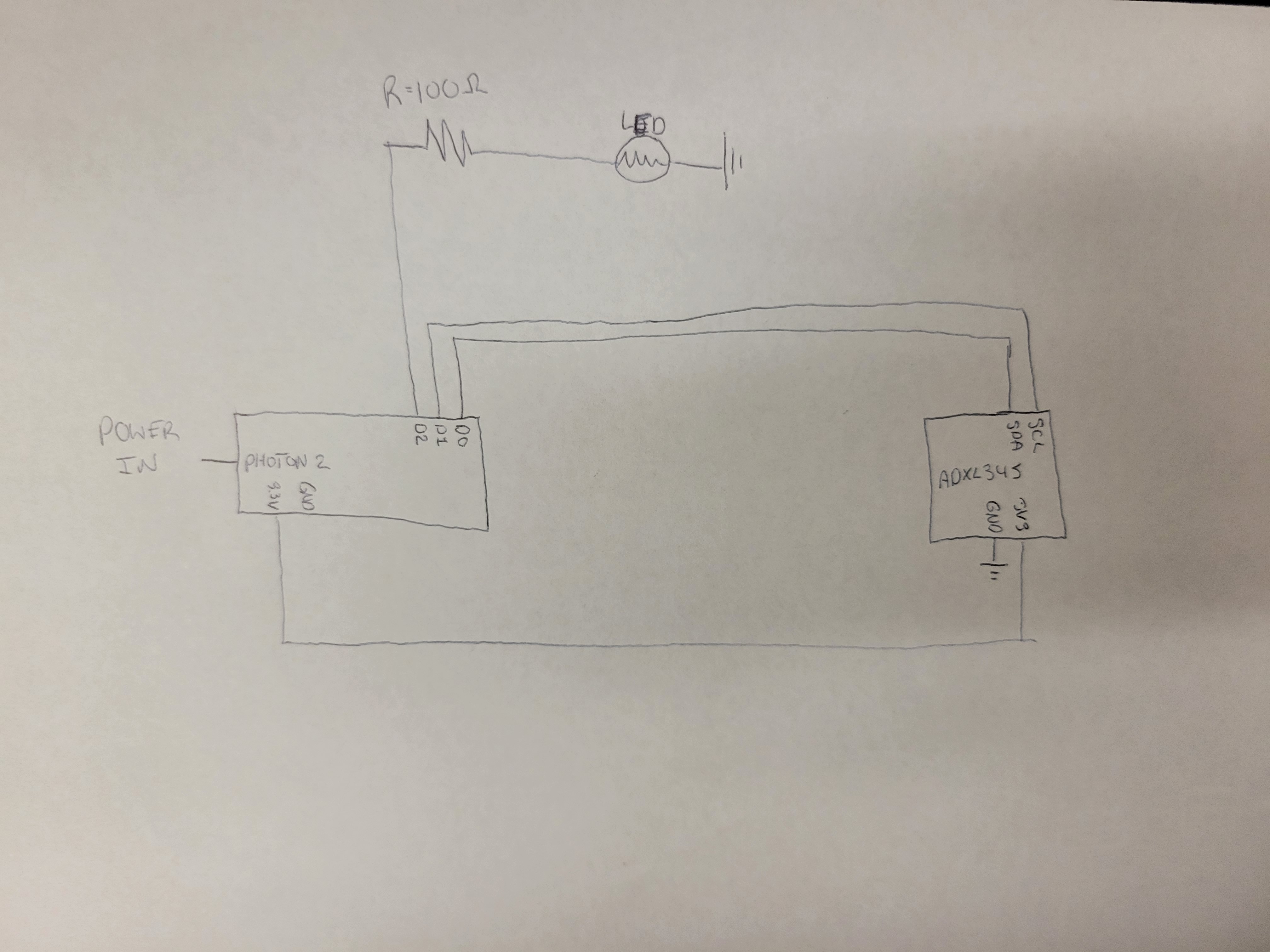
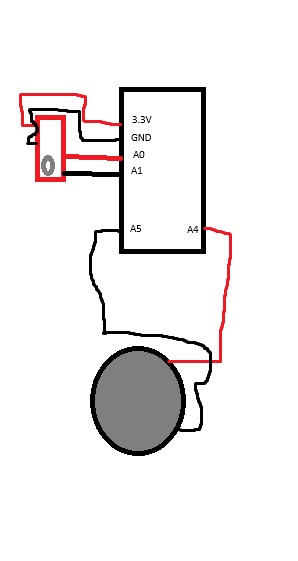
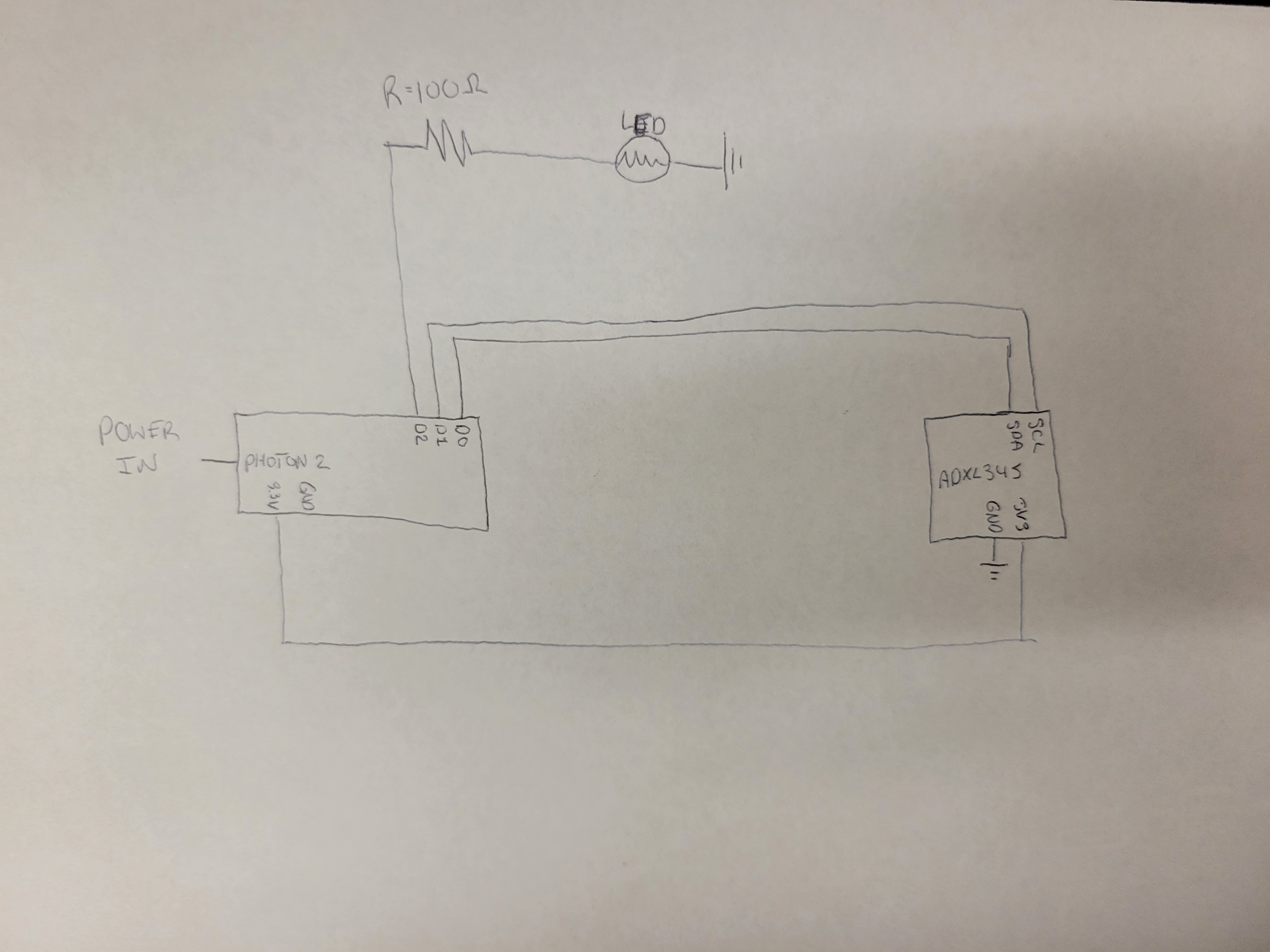
AccelerometerThe accelerometer was a chosen device specifically for fall detection. The idea was for the climber to have an accelerometer attached to their end of the device, which would detect if they were ever in free fall. This would then trigger an alarm on the belayers side to alert them of the fall. For the sake of the prototype, we have decided to simply use an LED instead of an alarm. The specific model of accelerometer was chosen specifically because it has a built in free fall detection which can be accessed in the Photon's libraries. However, we were unable to get this aspect functioning so we created a work around. An object in free fall is accelerating at the same rate as gravity, so it should be effectively weightless, and read no acceleration. We created an if statement that stated if the acceleration values were close to zero, then the device would trigger.
An additional functionality of the accelerometer that was written into the code was the ability to detect acceleration values in each direction. This could be used to determine the orientation of the climber. These values were successfully published to the particle console.













_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
Comments