





Hardware components | ||||||
 |
| × | 1 | |||
| × | 2 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
This work is the completion work of Bongilchoen High School Fab Lab academy.
1 / 2
1 / 3
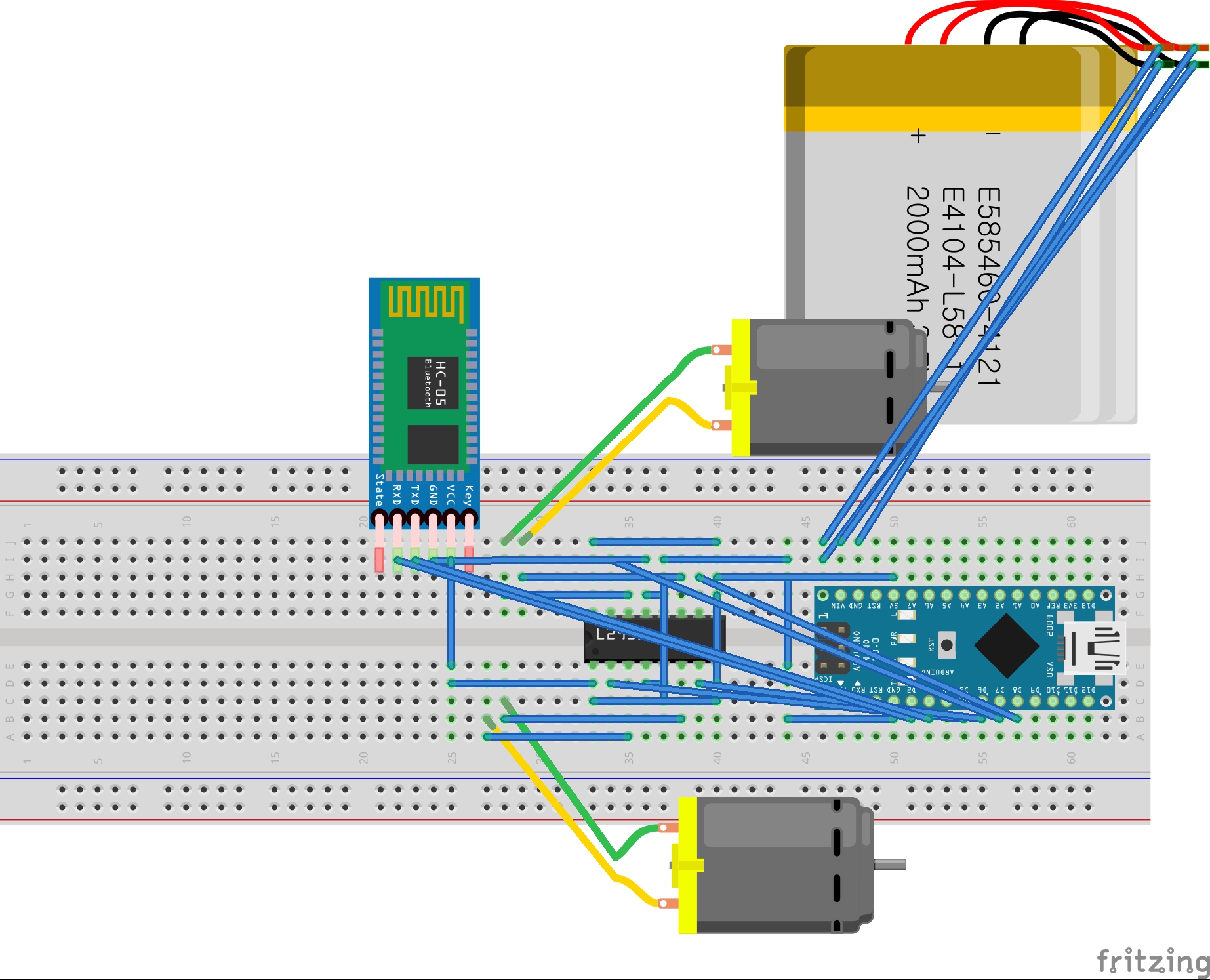
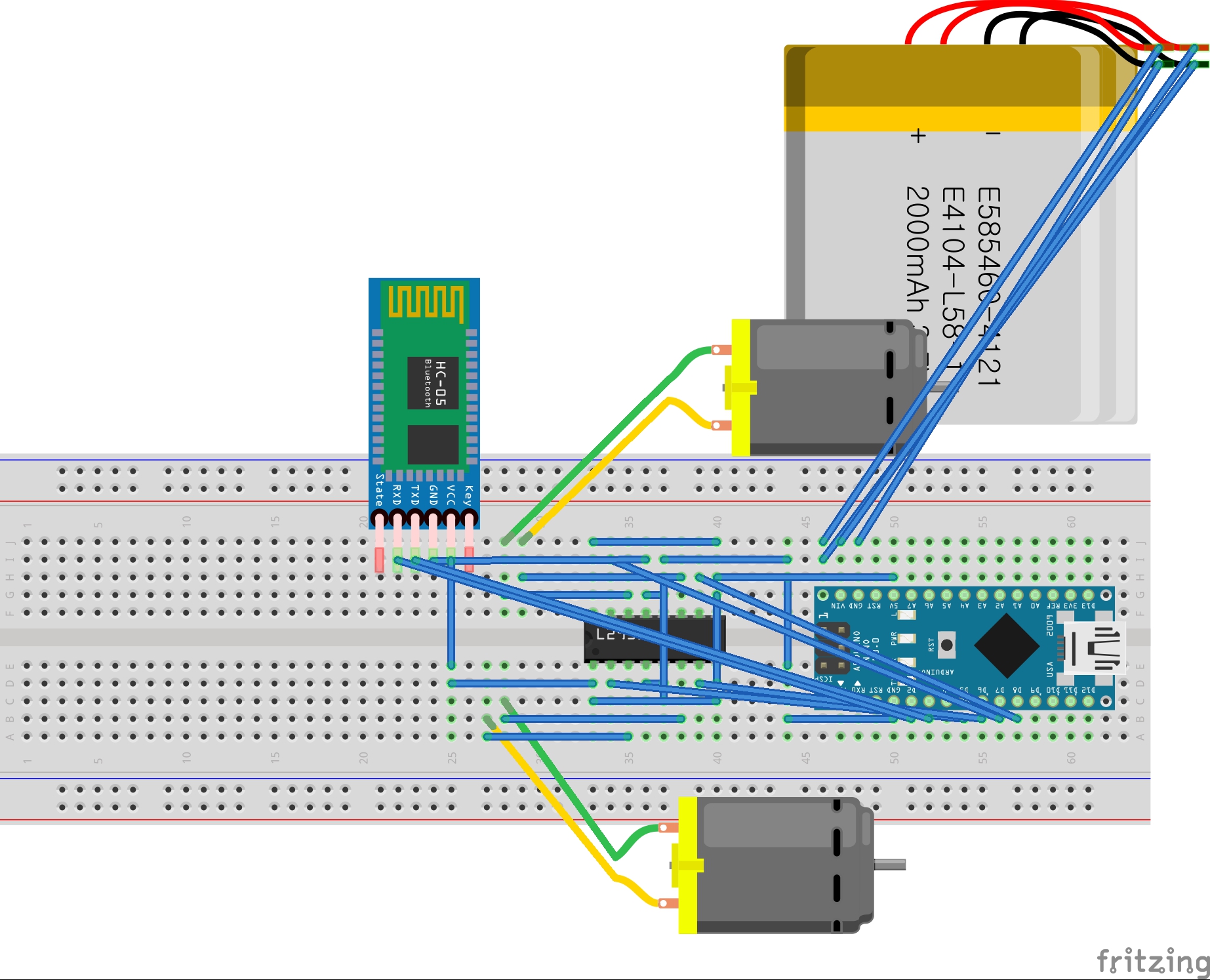
We have to make something for assignment with Laser cutter or 3D printer. After distress , we decide to make RC car. This works by Arduino. We figured out how to make a rc car and decided to use two motors and a l239d motor ic. So we created a circuit diagram, coded it, constructed a basic operation mechanism, and ran the frame with a laser cutter. , The output was insufficient, so that 4 AA batteries were connected and an additional 6v was supplied I also wanted to add a led light function, but I did not add it off the clock (there is a trace in the source code)
{kind=link}

1 project • 7 followers
Ordinary high school student who wants to enter science and engineering college

100 projects • 115 followers
Looking back on my childhood, I was happy when I was making something and I was proud of myself.
"Making is instinct!"

Comments