



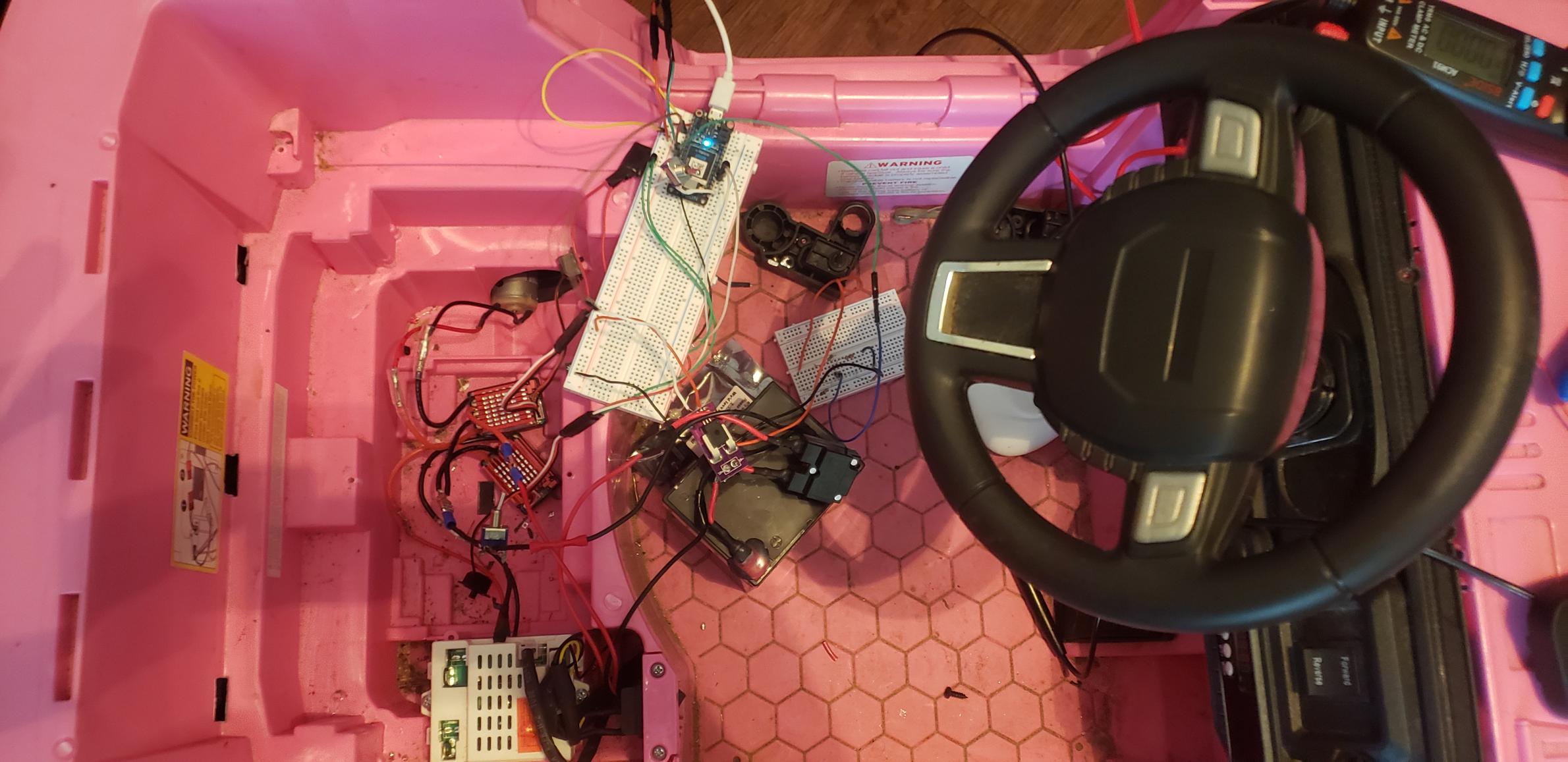
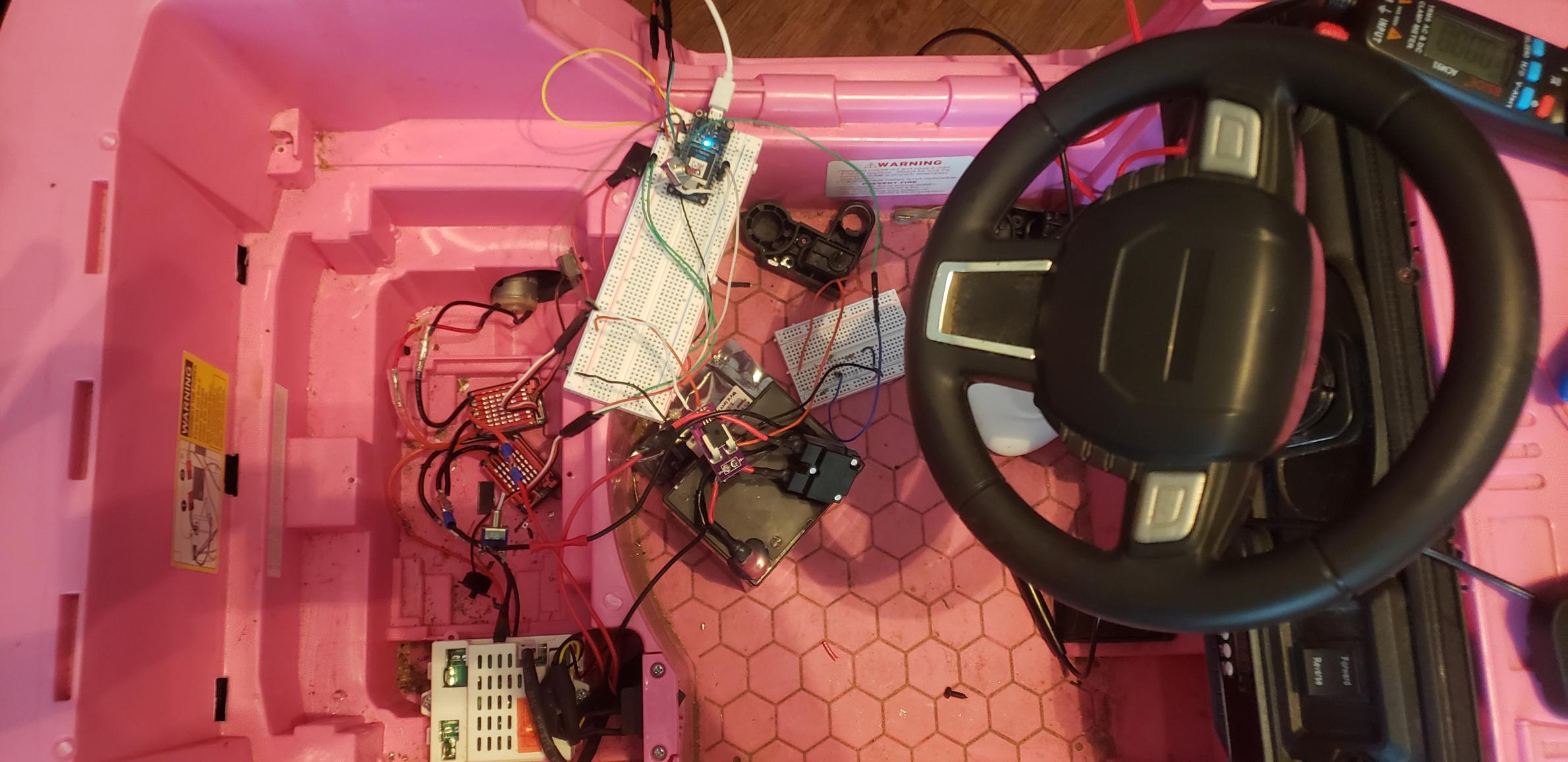
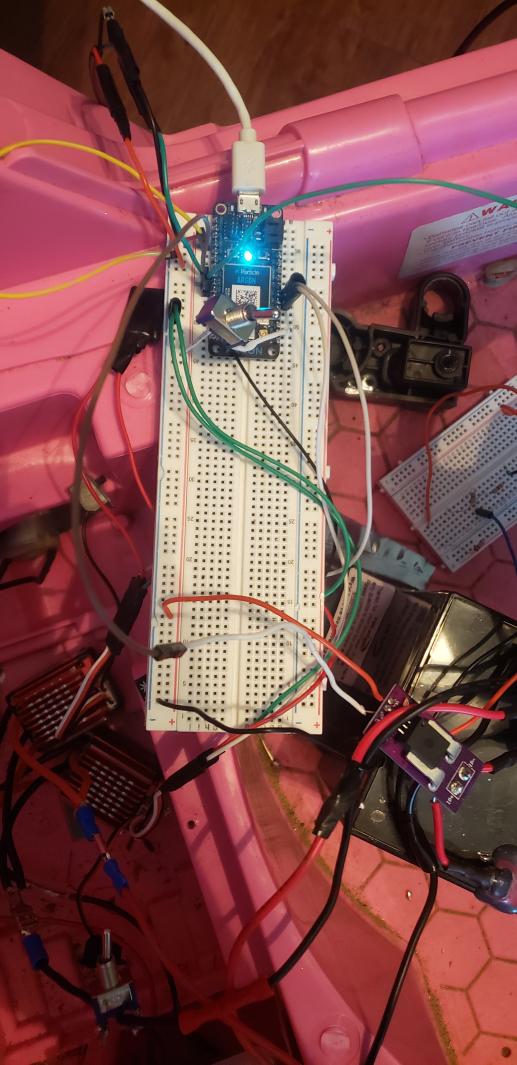
A power wheel is modified to have improved traction control along with variable speed control. Below is a video of the added variable speed feature:

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
// Enable system threading
SYSTEM_MODE(AUTOMATIC);
SYSTEM_THREAD(ENABLED);
// Define analog pins
const int VOLTAGE_PIN = A5;
const int CURRENT_PIN = A4;
const int THROTTLE_PIN = A3;
// Define digital pins
const int ENA_PIN = D5;
const int ENB_PIN = D6;
const int DIR_PIN = D2;
// Define voltage ratio and current calibration values
const float VOLTAGE_RATIO = 2.36;
const float CURRENT_CALIBRATION = .17;
// Define variables to store raw values
int rawVoltage;
int rawCurrent;
int rawThrottle;
// Define variables to store filtered values
float filteredVoltage;
float filteredCurrent;
// Define the time interval for reading the analog inputs (in microseconds)
const unsigned long READ_INTERVAL = 10000;
// Define the time interval for outputting the filtered values (in milliseconds)
const unsigned long OUTPUT_INTERVAL = 10000;
// Define the filter coefficients for a first-order low-pass filter with a cutoff frequency of 5 Hz
const float FILTER_COEFFICIENT = 0.0183;
// Define the timer for outputting the filtered values
unsigned long outputTimer = 0;
// Define variables to control motor speed and motor direction
int motorSpeed = 0;
bool motorDirection = false;
void setup() {
// Initialize the serial communication
Serial.begin(9600);
pinMode(ENA_PIN, OUTPUT);
pinMode(ENB_PIN, OUTPUT);
pinMode(DIR_PIN, INPUT_PULLDOWN);
}
void loop() {
// Read the analog inputs
rawVoltage = analogRead(VOLTAGE_PIN);
rawCurrent = analogRead(CURRENT_PIN);
rawThrottle = analogRead(THROTTLE_PIN);
// Convert the raw values to voltages and current
float voltage = (rawVoltage - 0) * 6.0 / 4095.0 * VOLTAGE_RATIO;
float current = (rawCurrent - 3450.0) * 6.0 / 4095.0 / CURRENT_CALIBRATION;
// Filter the values
filteredVoltage = FILTER_COEFFICIENT * voltage + (1 - FILTER_COEFFICIENT) * voltage;
filteredCurrent = FILTER_COEFFICIENT * current + (1 - FILTER_COEFFICIENT) * current;
// Check if it's time to output the filtered values
if (millis() - outputTimer >= OUTPUT_INTERVAL) { Serial.print("Filtered voltage: ");
// Output the filtered values
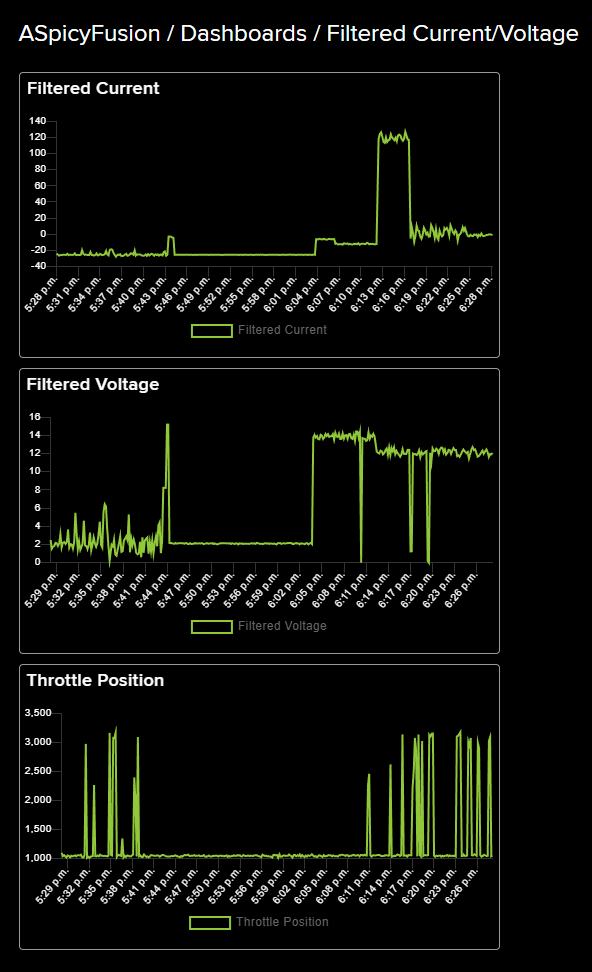
Particle.publish("Filtered current", String(filteredCurrent));
Particle.publish("Filtered voltage", String(filteredVoltage));
Particle.publish("Raw Throttle", String(rawThrottle));
Particle.publish("Reverse Swtich", String(digitalRead(DIR_PIN)));
// Reset the output timer
outputTimer = millis();
}
// Read toggle switch for forward/backward
motorDirection = digitalRead(DIR_PIN);
// Set motor direction to forward
if (motorDirection == HIGH) {
// Map motor speed to throttle position
motorSpeed = map(rawThrottle, 0, 4095, 210, 100);
// Run motors
analogWrite(ENA_PIN, motorSpeed);
analogWrite(ENB_PIN, motorSpeed);
}
// Set motor direction to backwards
else {
// Map motor speed to throttle position
motorSpeed = map(rawThrottle, 0, 4095, 160, 255);
// Run motors
analogWrite(ENA_PIN, motorSpeed);
analogWrite(ENB_PIN, motorSpeed);
}
unsigned long startTime = micros();
while (micros() - startTime < READ_INTERVAL) {
// Do nothing
}
}
// Define analog pins
const int VOLTAGE_PIN = A5;
const int CURRENT_PIN = A4;
const int THROTTLE_PIN = A3;
// Define digital pins
const int ENA_PIN = D5;
const int ENB_PIN = D6;
const int DIR_PIN = D2;
// Define voltage ratio and current calibration values
const float VOLTAGE_RATIO = 2.07;
const float CURRENT_CALIBRATION = -.13;
// Define variables to store raw values
int rawVoltage;
int rawCurrent;
int rawThrottle;
// Define variables to store filtered values
float filteredVoltage;
float filteredCurrent;
// Define the time interval for reading the analog inputs (in microseconds)
const unsigned long READ_INTERVAL = 10000;
// Define the time interval for outputting the filtered values (in milliseconds)
const unsigned long OUTPUT_INTERVAL = 10000;
// Define the filter coefficients for a first-order low-pass filter with a cutoff frequency of 5 Hz
const float FILTER_COEFFICIENT = 0.0183;
// Define the timer for outputting the filtered values
unsigned long outputTimer = 0;
// Define variables to control motor speed and motor direction
int motorSpeed = 0;
int outputSpeed = 180;
int prevSpeed;
bool motorDirection = false;
void setup() {
// Initialize the serial communication
Serial.begin(9600);
pinMode(ENA_PIN, OUTPUT);
pinMode(ENB_PIN, OUTPUT);
pinMode(DIR_PIN, INPUT_PULLDOWN);
}
void loop() {
// Read the analog inputs
rawVoltage = analogRead(VOLTAGE_PIN);
rawCurrent = analogRead(CURRENT_PIN);
rawThrottle = analogRead(THROTTLE_PIN);
// Convert the raw values to voltages and current
float voltage = (rawVoltage - 0) * 6.0 / 4095.0 * VOLTAGE_RATIO;
float current = (rawCurrent - 2050.0) * 6.0 / 4095.0 / CURRENT_CALIBRATION;
// Filter the values
filteredVoltage = FILTER_COEFFICIENT * voltage + (1 - FILTER_COEFFICIENT) * voltage;
filteredCurrent = FILTER_COEFFICIENT * current + (1 - FILTER_COEFFICIENT) * current;
// Check if it's time to output the filtered values
if (millis() - outputTimer >= OUTPUT_INTERVAL) { Serial.print("Filtered voltage: ");
// Output the filtered values
Particle.publish("Filtered current", String(filteredCurrent));
Particle.publish("Filtered voltage", String(filteredVoltage));
//Particle.publish("Raw Throttle", String(rawThrottle));
Particle.publish("Reverse Swtich", String(digitalRead(DIR_PIN)));
//Particle.publish("Prev Speed", String(prevSpeed));
Particle.publish("Speed", String(outputSpeed));
// Reset the output timer
outputTimer = millis();
}
// Read toggle switch for forward/backward
motorDirection = digitalRead(DIR_PIN);
// Implement slew rate traction control
// Define the maximum rate of increase in throttle per loop
#define SLEW_RATE 100
#define accel_step 1
// Set motor direction to forward
if (motorDirection == HIGH) {
// Map motor speed to throttle position
motorSpeed = map(rawThrottle, 0, 4095, 210, 100);
//
outputSpeed = constrain(outputSpeed, 100, 210);
if (outputSpeed != motorSpeed) {
if (outputSpeed < motorSpeed) {
outputSpeed += accel_step;
delay(SLEW_RATE);
}
else {
outputSpeed -= accel_step;
delay(SLEW_RATE);
}
}
// Run motors
analogWrite(ENA_PIN, outputSpeed);
analogWrite(ENB_PIN, outputSpeed);
}
// Set motor direction to backwards
else {
// Map motor speed to throttle position
motorSpeed = map(rawThrottle, 0, 4095, 160, 255);
//
outputSpeed = constrain(outputSpeed, 160, 255);
if (outputSpeed != motorSpeed) {
if (outputSpeed < motorSpeed) {
outputSpeed += accel_step;
delay(SLEW_RATE);
}
else {
outputSpeed -= accel_step;
delay(SLEW_RATE);
}
}
// Run motors
analogWrite(ENA_PIN, outputSpeed);
analogWrite(ENB_PIN, outputSpeed);
}
unsigned long startTime = micros();
while (micros() - startTime < READ_INTERVAL) {
// Do nothing
}
}





Comments