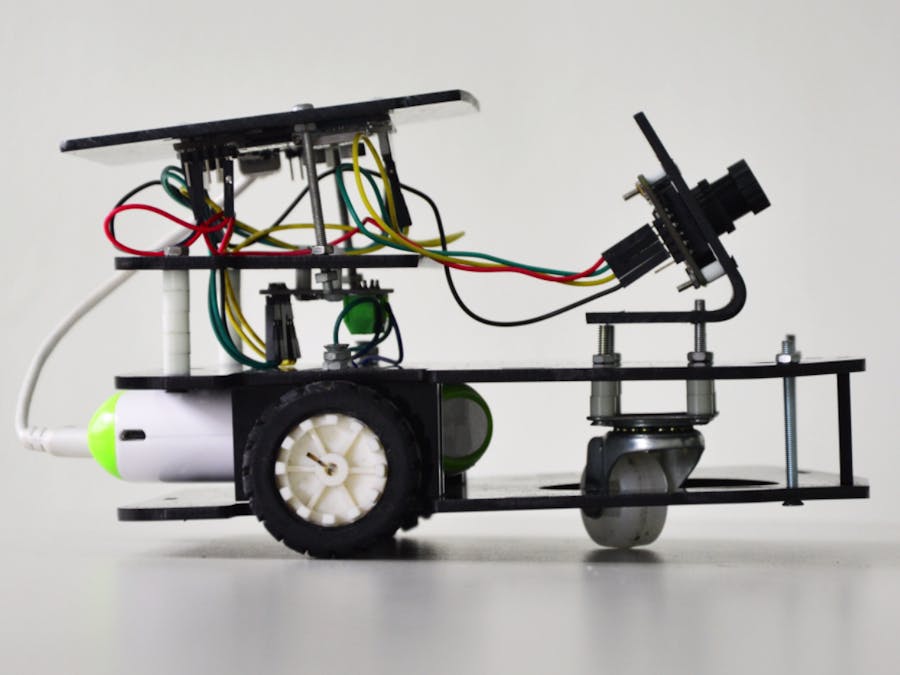
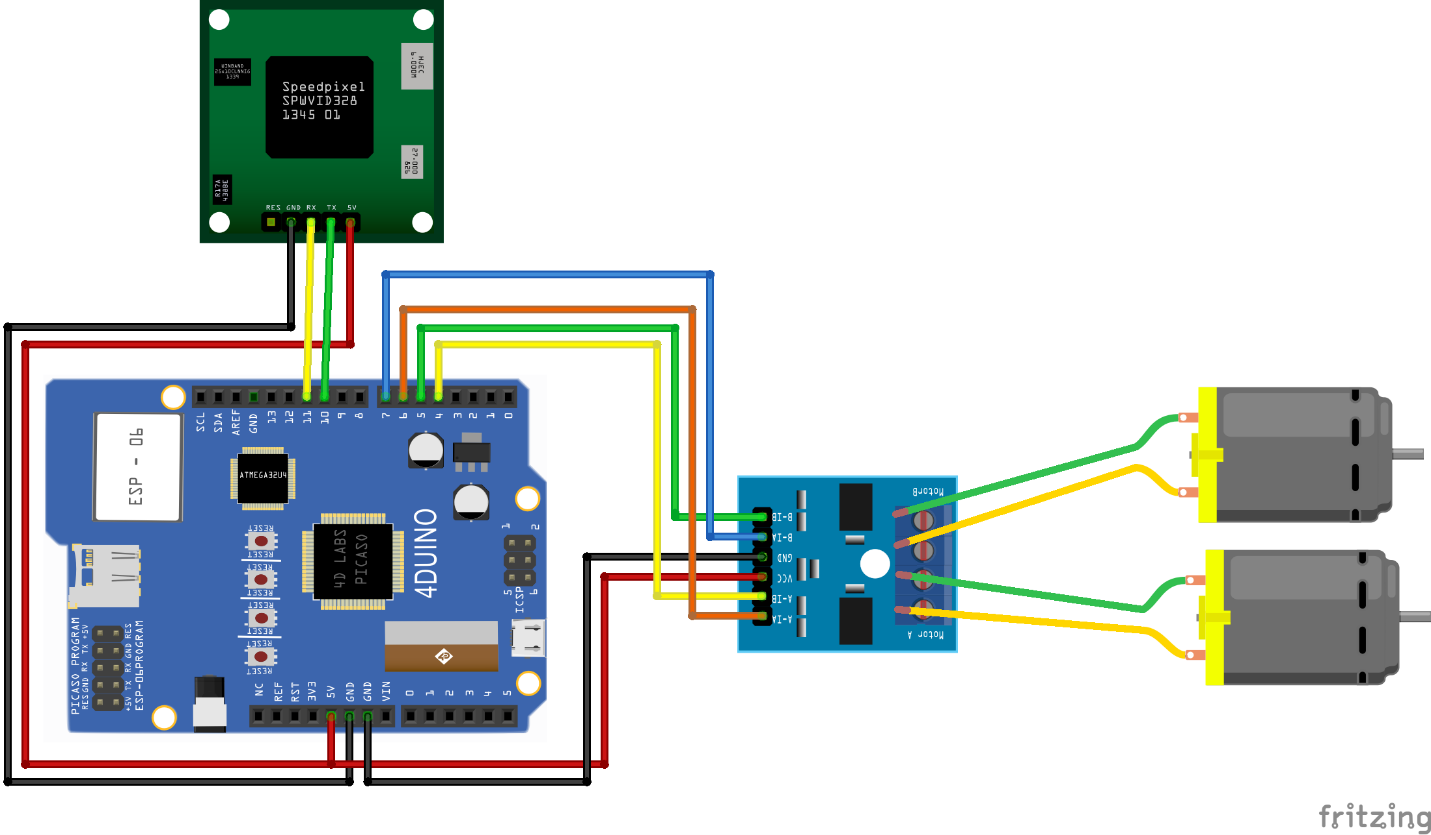
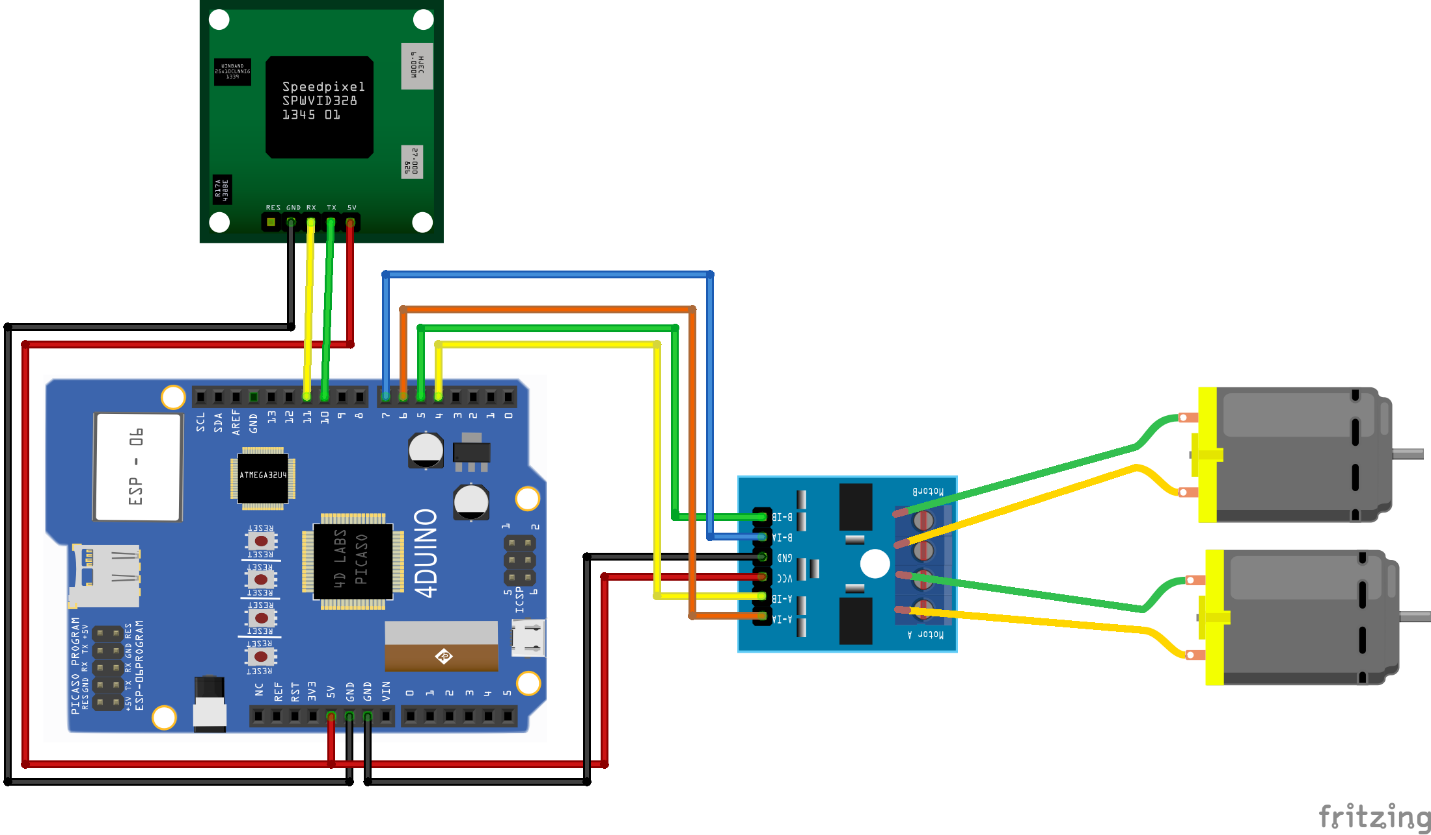
Client-Server Architecture4Duino SpyBot project demonstrates how does uCAM-II work. This project also utilized two 4Duino communicating using Server-Client architecture over TCP. It also uses a buggy car which carries the 4Duino server and uCAM-II. By using built-in ESP8266, 4Duino client sends a request to 4Duino server to move the buggy and capture photo via wireless communication.
Server-Client architecture is a network architecture which separates devices and application programs into two categories clients and servers to better employ available computing resources and share data processing loads. Initially, client uses the network as a way to connect and then sends a request. The server will take the request and makes sure that the request is valid. If valid, it fetches the request and serves the client.
TCPIn this project, TCP is used. Transmission Control Protocol or TCP is responsible for providing a reliable communications between hosts and processors on different hosts, it manages message acknowledgments and retransmissions in case of lost parts. Thus there is absolutely no missing data. In TCP, data can be sent bidirectionally.
uCAM-II is an integrated serial camera module. This is attached to the server 4Duino as its host to enable image capturing feature of this project. This module uses a CMOS VGA colour sensor along with JPEG compression chip. This camera uses a simple serial protocol. Please refer to uCAM-II Demo which shows how to interface 4Duino to uCAM-II and capture JPEG images then store it in the uSD card.
Read more here...






{kind=link}
Comments