

Hardware components | ||||||
 |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
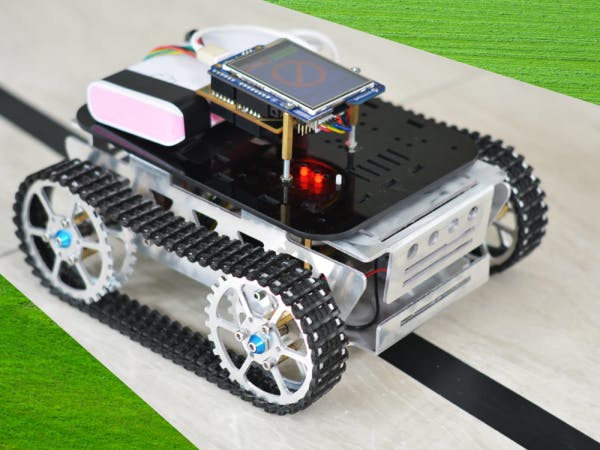
This project is a simple line follower robot. We used the 4Duino-24 as the controller of the robot or rover. The rover will be on track of the line with the IR sensor giving the direction moving forward, left, right, reverse and stop.
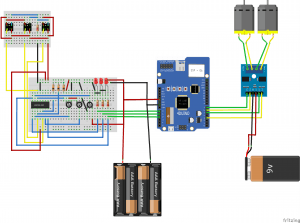
How it WorksBuild the circuit as shown in the diagram.
Step 2: ProgramWorkshop 4 – 4Duino Extended Graphics environment is used to program this project.
Workshop requires that the Arduino IDE be installed, as it calls the Arduino IDE for compiling the Arduino sketches. The Arduino IDE, however, is not required to be opened or modified to program the 4Duino.
Open this file using Workshop 4.
Note: Download the project here.
Step 3: CompileClick on the “Compile” button.
Note: This step could be skipped. However, compiling is essential for debugging purposes.
Step 4: Comms PortConnect the 4Duino to the PC using µUSB cable.
Then navigate to the Comms tab and select the Comms port to which the 4Duino connected.
Step 5: Compile and UploadGo back to “Home” tab. This time, click on the “Comp’nLoad” button.
Workshop 4 will prompt you to select a drive to copy the image files to a uSD Card. After selecting the correct drive, click OK.
The module will prompt you to insert the uSD card.
Properly unmount the uSD Card from the PC, and insert it to the uSD Card slot of the display module. The image below must appear on your display after completing the steps above.
After uploading, 4Duino will start running the code.
Photo of Screen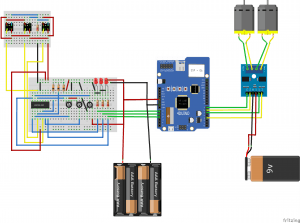


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments