


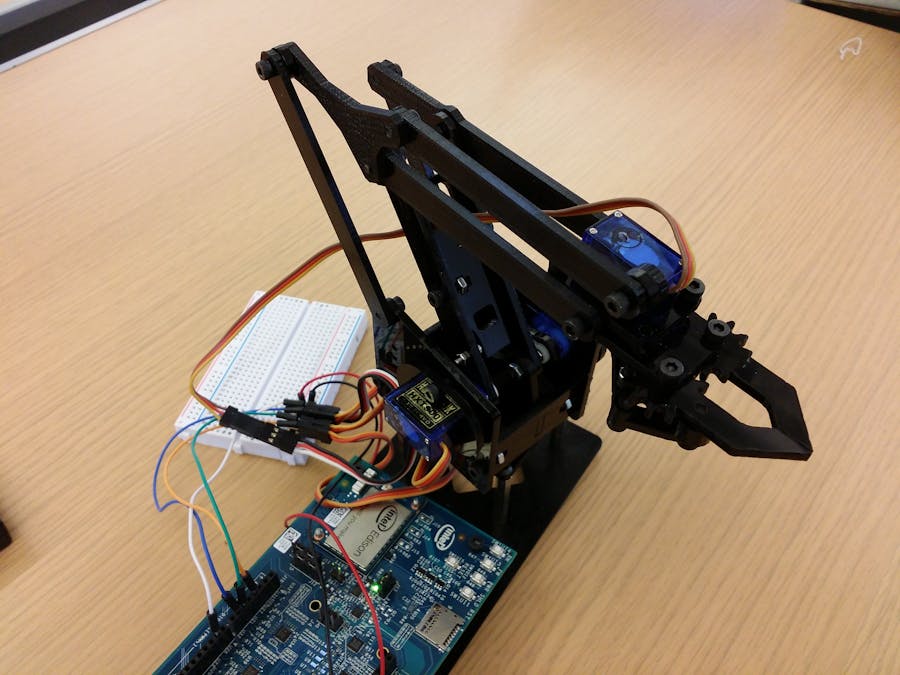
// Robotics-0ver-Internet by Meng Yee (Michael) Chuah and Victor Carreno
#include "meArm.h" // From Inverse kinematics control library for Phenoptix meArm http://github.com/yorkhackspace/meArm/blob/master/meArm.h
#include <Servo.h>
#include <String>
#include <iostream>
#include <SPI.h>
#include <WiFi.h>
#include <aREST.h> // From A RESTful environment for Arduino http://github.com/marcoschwartz/aREST
// aREST.h needs to be edited to inclue itoa.h from https://github.com/pchickey/gcc-sam3u-build
char ssid[] = "MassChallenge Now"; // your network SSID (name)
char pass[] = "hackster15"; // your network password (use for WPA, or use as key for WEP)
int keyIndex = 0; // your network key Index number (needed only for WEP)
int status = WL_IDLE_STATUS;
// Create aREST instance
aREST rest = aREST();
// Initialize the WiFi server library
WiFiServer server(3000);
int basePin = 3;
int shoulderPin = 5;
int elbowPin = 6;
int gripperPin = 9;
int val;
/*
// Full constructor uses calibration data, or can just give pins
meArm(int sweepMinBase=145, int sweepMaxBase=49, float angleMinBase=-pi/4, float angleMaxBase=pi/4,
int sweepMinShoulder=118, int sweepMaxShoulder=22, float angleMinShoulder=pi/4, float angleMaxShoulder=3*pi/4,
int sweepMinElbow=144, int sweepMaxElbow=36, float angleMinElbow=pi/4, float angleMaxElbow=-pi/4,
int sweepMinGripper=75, int sweepMaxGripper=115, float angleMinGripper=pi/2, float angleMaxGripper=0) arm;
*/
meArm arm(110, 9, -pi/4, pi/4,
151, 47, pi/4, 3*pi/4,
175, 95, pi/4, -pi/4,
127, 151, pi/2, 0);
Servo gripper; // create servo object to control a servo
void setup() {
Serial.begin(115200);
arm.begin(basePin, shoulderPin, elbowPin, gripperPin);
arm.openGripper();
gripper.attach(9);
// Give name and ID to device
rest.set_id("008");
rest.set_name("robot0internet_Edison");
// Function to be exposed
rest.function("message", printMessage);
rest.function("gripper", gripperAction);
// check for the presence of the shield:
if (WiFi.status() == WL_NO_SHIELD) {
Serial.println("WiFi shield not present");
// don't continue:
while (true);
}
String fv = WiFi.firmwareVersion();
if ( fv != "1.1.0" )
Serial.println("Please upgrade the firmware");
// Attempt to connect to Wifi network:
while ( status != WL_CONNECTED) {
Serial.print("Attempting to connect to SSID: ");
Serial.println(ssid);
// Connect to WPA/WPA2 network. Change this line if using open or WEP network:
status = WiFi.begin(ssid, pass);
Serial.println("Instructions: Connect to http://IP:3000/gripper?params=1 to open the gripper");
Serial.println("Instructions: Connect to http://IP:3000/message?params=x,y,z to set the endpoint position, where x,y,z are integer values in mm");
// Wait 10 seconds for connection
delay(10000);
}
// Start the server
server.begin();
// Print out the status
printWifiStatus();
}
void loop() {
// listen for incoming clients
WiFiClient client = server.available();
rest.handle(client);
}
int gripperAction(String command){
if(command.toInt()==1){
gripper.write(151);
Serial.println("Gripper open");
}else{
gripper.write(121);
Serial.println("Gripper close");
}
return 1;
}
int printMessage(String command) {
Serial.println(command);
int pos, posAux;
//Getting the first value
String stringAux;
pos = command.indexOf(',');
String string1 = command.substring(0,pos);
stringAux = command.substring(pos+1);
//Second Value
pos = stringAux.indexOf(',');
String string2 = stringAux.substring(0,pos);
stringAux = stringAux.substring(pos+1);
//Third Value
String string3 = stringAux;
int x = string1.toInt();
int y = string2.toInt();
int z = string3.toInt();
if(arm.isReachable(x,y,z)) {
Serial.print("Going to point (");
Serial.print(x);
Serial.print(",");
Serial.print(y);
Serial.print(",");
Serial.print(z);
Serial.println(")");
arm.gotoPoint(x,y,z);
} else {
Serial.print("Point (");
Serial.print(x);
Serial.print(",");
Serial.print(y);
Serial.print(",");
Serial.print(z);
Serial.println(") is not reachable");
}
return 1;
}
void printWifiStatus() {
// print the SSID of the network you're attached to:
Serial.print("SSID: ");
Serial.println(WiFi.SSID());
// print your WiFi shield's IP address:
IPAddress ip = WiFi.localIP();
Serial.print("IP Address: ");
Serial.println(ip);
// print the received signal strength:
long rssi = WiFi.RSSI();
Serial.print("signal strength (RSSI):");
Serial.print(rssi);
Serial.println(" dBm");
}


12 projects • 45 followers
I design and build hardware and software.I build stuff 💻⚒.


Comments