

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 4 | ||||
| × | 4 | ||||
| × | 8 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
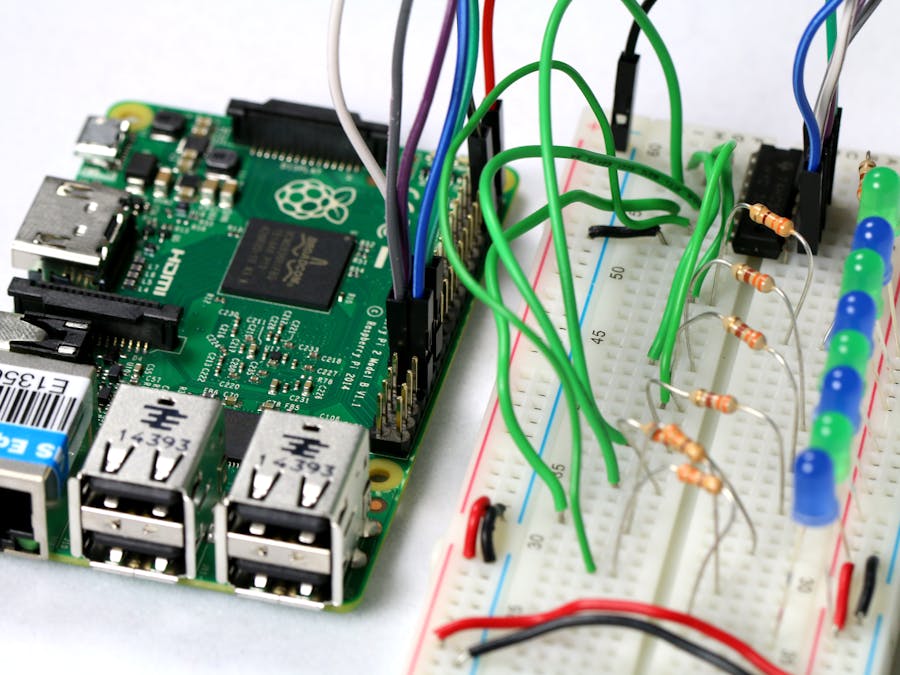
In this sample, we’ll connect an 8-bit serial-in, parallel-out shift register to your Raspberry Pi 2 and create a simple app that uses the shift register to control eight LEDs.
This is a headed sample, so please ensure that your device is in headed mode by running this command: setbootoption.exe headed (changing the headed/headless state will require a reboot).
Connect the Shift Register to Your Device
You will need the following components :
1 Raspberry Pi 2
An HDMI monitor
A breadboard and several male-to-female and male-to-male connector wires
Let’s start by wiring up the components on the breadboard as shown in the diagram below.
Note: Make sure to power off the RPi2 when connecting your circuit. This is good practice to reduce the chance of an accidental short circuit during construction.
Here is the schematic:
Connecting the 74HC595N Shift Register
Place the Shift Register on your breadboard such that it straddles the center gap of the breadboard.
Locate pin 1 of the 74HC595N shift register by finding the notch on the IC. If you orient the IC so that the end with the notch is facing left, pin 1 will be the first pin in the lower left below the notch.
The pinout of the 74HC595N is shown below and can be found in the datasheet.
Make the following connections on the 74HC595N shift register:
Pins 1, 2, 3, 4, 5, 6, 7 and Pin 15 Q0 thru Q7: Connect each of these pins to a 330 Ω resistor - one 330 Ω resistor for each pin
Pin 8 GND: Connect to the ground rail on the side of the breadboard (blue stripe)
Pin 9 Q7’: Leave unconnected
Pin 10 SRCLR: Connect to GPIO 12 (pin 32) on the RPi2 (pin mapping is below)
Pin 11 SRCLK: Connect to GPIO 18 (pin 12) on the RPi2
Pin 12 RCLK: Connect to GPIO 5 (pin 29) on the RPi2
Pin 13 OE: Connect to GPIO 6 (pin 31) on the RPi2
Pin 14 SER: Connect to GPIO 27 (pin 13) on the RPi2
Pin 15 Q7: See above.
Pin 16 VCC: Connect to the voltage supply rail on the side of the breadboard (red stripe)
Connecting the LEDs and Resistors
Let’s add the LEDs and resistors to the breadboard.
If not already connected, place eight 330 Ω resistors on the breadboard and connect each resistor to an output pin (Q0 thru Q7) on the shift register.
Connect a cathode (the shorter leg) of the four green and four blue LEDs to the other end of a 330 Ω resistor you placed on the breadboard in the previous step. Try to keep the LEDs lined up together in a row on the breadboard. The order of the green and blue LEDs is up to you. We chose to alternate LED colors.
Connect the anodes (the longer leg) of the LEDs to the voltage supply rail on the side of the breadboard (red stripe)
When done, you should have a row (or as close to a row as possible) of blue and green LEDs on your breadboard.
Each of the shift register outputs Q0 thru Q7 should be connected to a 330 Ω resistor.
The other end of each of the 330 Ω resistors should be connected to the cathode of an LED.
Each LED should have its anode connected to the voltage supply rail.
Connecting the Raspberry Pi 2
We need to hook up power, ground, and the I2C lines from on the Raspberry Pi 2 to the 74HC595N shift register and the breadboard.
Pin 2 5V PWR Connect to the voltage supply rail on the side of the breadboard (red stripe)
Pin 6 GND Connect to the ground rail on the side of the breadboard (blue stripe)
Pin 12 GPIO18 If not already connected, connect to SRCLK (pin 11) on the shift register
Pin 13 GPIO27 If not already connected, connect to SER (pin 14) on the shift register
Pin 29 GPIO5 If not already connected, connect to RCLK (pin 12) on the shift register
Pin 31 GPIO6 If not already connected, connect to OE (pin 13) on the shift register
Pin 32 GPIO12 If not already connected, connect to SRCLR (pint 10) on the shift register
Create the Sample App
When everything is set up, power your device back on. You can find this sample here, but as an excercise, this tutorial will take you through the complete steps to create this app from scratch. Open up Visual Studio and create a new C# Windows Universal Blank App (see the ‘Hello World’ sample if you need guidance on how to create a new app). For this sample, we cleverly named ours ShiftRegisterSample.
The code in this sample does three things:
Initializes the the RPi2 GPIO pins and the 74HC595N shift register
At regular intervals, it clocks in one data bit on the shift register’s serial input.
-
Responds to user input
a. Changes the timer delay based on user input. This results in a change in the blinking rate of the LEDs
b. Inverts the LED flashing pattern if the user clicks the Invert button on the display
Add content to MainPage.xaml
Let’s add some content to the MainPage which will be displayed on a screen connected to the Raspberry Pi 2. We want to add a couple TextBoxes, a Slider, and a Button.
The Slider allows the user to control the rate at which the LEDs flash.
The button allows the user to invert the pattern which the LEDs use to flash.
The Textboxes will provide info about the slider.
Let’s begin.
From Solution Explorer, select the MainPage.xaml file.
Locate the
<Grid>tag in the XAML section of the designer, and add the following markup:
<Grid Background="Black">
<StackPanel HorizontalAlignment="Center" VerticalAlignment="Center">
<TextBlock x:Name="DelayText" Text="500ms" Margin="10" TextAlignment="Center" FontSize="26.667" />
<Slider x:Name="Delay" Width="200" Value="500" Maximum="1000" LargeChange="100" SmallChange="10" Margin="10" ValueChanged="Delay_ValueChanged" StepFrequency="10"/>
<Button Name="ToggleButton" Content="Invert LEDs" FontSize="26.667" Width="400" HorizontalAlignment="Center" Height="50" Margin="10" Background="Red" Click="ToggleButtonClicked" />
<TextBlock x:Name="GpioStatus" Text="Waiting to initialize GPIO..." Margin="10,50,10,10" TextAlignment="Center" FontSize="26.667" />
</StackPanel>
</Grid>Add code to MainPage.xaml.cs
Before we add any code to MainPage.xaml.cs, we need to add a reference to the Windows IoT Extension SDK.
In Solution Explorer, right-click on References and select Add Reference…
In the Reference Manager window, click the arrow next to Windows Universal then click on Extensions
Place a check mark in the box next to Windows IoT Extension SDK and click OK
Open MainPage.xaml.cs from Solution Explorer (you may need to click on the arrow next to MainPage.xaml first)
Add the following line at the top of MainPage.xaml.cs
using Windows.Devices.Gpio;With the references add, lets start adding code. The complete code we implemented for MainPage.xaml.cs is located at end of this section. Below are some key parts of the code with explanations
Variables and Constants
// use these constants for controlling how the initial time interval for clocking in serial data to the shift register.
private const double TIMER_INTERVAL = 100; // value is milliseconds and denotes the timer interval
private const double TIME_DELAY = 1;
// The 74HC595N has five input pins that are used to control the device.
// See the datasheet http://www.ti.com/lit/ds/symlink/sn74hc595.pdf for details
// Shift Register Clock (SRCLK): the clock for the serial input to the shift register
private const int SRCLK_PIN = 18; // GPIO 18 is pin 12 on RPI2 header
private GpioPin shiftRegisterClock;
// Serial input (SER): the serial data input to the shift register. Use in conjunction with SRCLK.
private const int SER_PIN = 27; // GPIO 27 is pin 13 on RPI2 header
private GpioPin serial;
// Storage Register Clock (RCLK): the clock for clocking data from the serial input to the parallel output in the shift register
private const int RCLK_PIN = 5; // GPIO 5 is pin 29 on RPI2 header
private GpioPin registerClock;
// Output Enable (OE): When set low, the each of the eight shift register outputs (Q0, Q1,...Q7) are set high/low depending on the binary value in the storage register
private const int OE_PIN = 6; // GPIO 6 is pin 31 on RPI2 header
private GpioPin outputEnable;
// Storage Register Clock (SRCLK): the clock for clocking the current 8 bits of data from the serial input register to the storage register
private const int SRCLR_PIN = 12; // GPIO 12 is pin 32 on RPI2 header
private GpioPin shiftRegisterClear;
private DispatcherTimer timer;
private byte pinMask = 0x01;
private bool areLedsInverted = true;
private SolidColorBrush redBrush = new SolidColorBrush(Windows.UI.Colors.Red);
private SolidColorBrush grayBrush = new SolidColorBrush(Windows.UI.Colors.LightGray);Here are what some of these constants and variables represent
SRCLK_PIN,SER_PIN,RCLK_PIN,OE_PIN,SRCLR_PINrepresent the RPi2 GPIO numbers of the pins connected to the correspondingly named shift register control pins.shiftRegisterClock,serial,registerClock,outputEnable,shiftRegisterClearare the GPIO objects that are used to control the RPi2 GPIO pins that connect to the correspondingly named shift register pins.pinMaskcontains the data bits that we clock in to the shift register one bit at a time. The bits in pinMask represent the on/off pattern for the LEDs. A bit value of ‘1’ represents an off LED and a bit value of ‘0’ is an on LED.
The method InitializeSystem()
InitializeSystem() does the following:
Sets up the RPi2 GPIO that are used to control and send data to the shift register
Sets up the timer used control the frequency at which the RPi2 sends one bit of data to the shift register
private void InitializeSystem()
{
// initialize the GPIO pins we will use for bit-banging our serial data to the shift register
var gpio = GpioController.GetDefault();
// Show an error if there is no GPIO controller
if (gpio == null)
{
GpioStatus.Text = "There is no GPIO controller on this device.";
return;
}
// setup the RPi2 GPIO that controls the shift register
shiftRegisterClock = gpio.OpenPin(SRCLK_PIN);
serial = gpio.OpenPin(SER_PIN);
registerClock = gpio.OpenPin(RCLK_PIN);
outputEnable = gpio.OpenPin(OE_PIN);
shiftRegisterClear = gpio.OpenPin(SRCLR_PIN);
// reset the pins to a known state
shiftRegisterClock.Write(GpioPinValue.Low);
shiftRegisterClock.SetDriveMode(GpioPinDriveMode.Output);
serial.Write(GpioPinValue.Low);
serial.SetDriveMode(GpioPinDriveMode.Output);
registerClock.Write(GpioPinValue.Low);
registerClock.SetDriveMode(GpioPinDriveMode.Output);
outputEnable.Write(GpioPinValue.Low);
outputEnable.SetDriveMode(GpioPinDriveMode.Output);
shiftRegisterClear.Write(GpioPinValue.Low);
shiftRegisterClear.SetDriveMode(GpioPinDriveMode.Output);
// With the shiftRegisterClear GPIO set low, sending a rising edge on the register clock
// will clear (set all bits to 0) the shift register
registerClock.Write(GpioPinValue.High);
// typically, when bit-banging a serial signal out, a delay is needed between setting the output
// value and sending a rising or falling edge on the clock. However, the setup and hold
// times for this shift register at 5V are in the nanoseconds (see datasheet) so we can cheat
// a bit here by not adding a delay before driving the register clock low
registerClock.Write(GpioPinValue.Low);
shiftRegisterClear.Write(GpioPinValue.High);
GpioStatus.Text = "GPIO pin initialized correctly.";
try
{
timer = new DispatcherTimer();
timer.Interval = TimeSpan.FromMilliseconds(TIMER_INTERVAL);
timer.Tick += Timer_Tick;
timer.Start();
}
catch (Exception e)
{
System.Diagnostics.Debug.WriteLine("Exception: {0}", e.Message);
return;
}
}The method SendDataBit()
SendDataBit() is called by the timer when the designated time interval has pass. This method clocks out one bit of data representing the most significant bit (MSB) in the variable pinMask. The data bit is clocked into the first bit position in the shift register. The toggling of the serial clock pin by the RPi2 to clock in the data bit also causes the previous eight bits of data in the shift register to shift one bit position with the bit in the last position being lost. After clocking in the data bit, all bits in pinMask are left shifted one bit position. The value of pinMask is then checked and, depending on whether the LED lighting pattern is set as inverted, the least significant bit (LSB) of ‘pinMask’ is set to either a ‘1’ or ‘0’.
private void SendDataBit()
{
if ((pinMask & 0x80) > 0)
{
serial.Write(GpioPinValue.High);
shiftRegisterClock.Write(GpioPinValue.High);
shiftRegisterClock.Write(GpioPinValue.Low);
registerClock.Write(GpioPinValue.High);
registerClock.Write(GpioPinValue.Low);
}
else
{
serial.Write(GpioPinValue.Low);
shiftRegisterClock.Write(GpioPinValue.High);
shiftRegisterClock.Write(GpioPinValue.Low);
registerClock.Write(GpioPinValue.High);
registerClock.Write(GpioPinValue.Low);
}
pinMask <<= 1;
if (areLedsInverted)
{
if (pinMask == 0)
{
pinMask = 0x01;
}
}
else
{
pinMask |= 0x01;
if (pinMask == 0xFF)
{
pinMask &= 0xFE;
}
}
}ToggleButtonClicked() is triggered when the app user clicks on the button on the display screen to invert the LEDs. This method inverts all the bits inpinMask, sets or clears the flag areLedsInverted depending on what the previous state was. Finally, it changes the color of the button - red when the LEDs are inverted and gray when they are not.
private void ToggleButtonClicked(object sender, RoutedEventArgs e)
{
pinMask ^= 0xFF;
if (areLedsInverted)
{
areLedsInverted = false;
ToggleButton.Background = grayBrush;
}
else
{
areLedsInverted = true;
ToggleButton.Background = redBrush;
}
}Build, Deploy and Run the App
Let’s build, deploy and run the app on our Raspberry Pi 2.
If not already open, open in Visual Studio the app you created with the code above.
Set the ‘Remote Debugging’ setting to point to your device. See the ‘Hello World’ sample if you need guidance on how to do this.
Press ‘F5’ or click on the ‘Remote Machine’ button in the Visual Studio toolbar.
After several moments, you will see the screen attached to the RPi2 change to show a slider, some text, and a button. The LEDs will light up and follow the pattern set in ‘pinMask’.
Congratulations! You’ve successfully connected an 8-bit serial-in, parallel-out shift register to your Raspberry Pi 2.



Comments