

Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
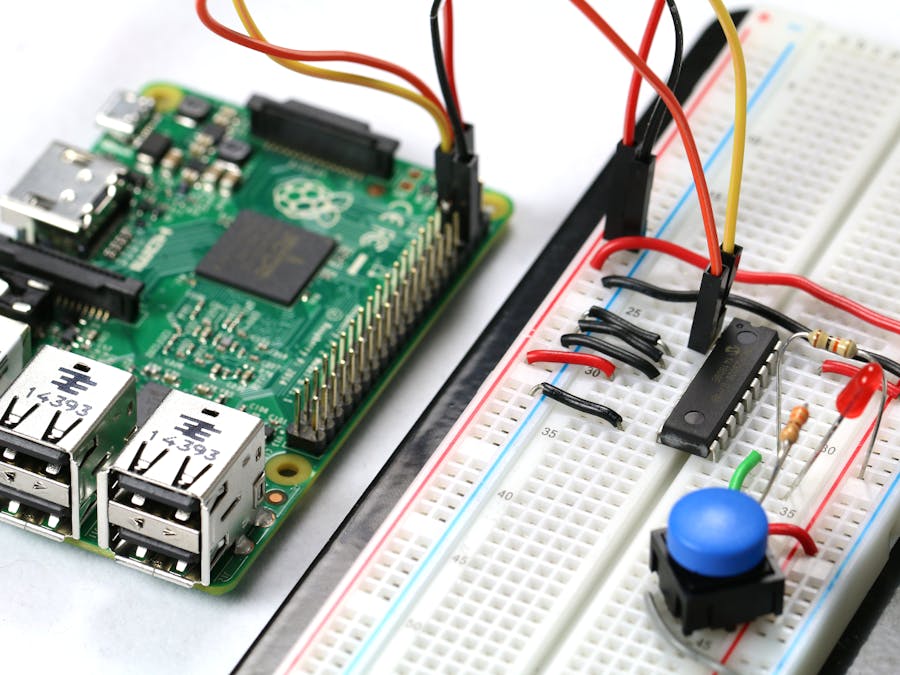
In this sample, we’ll connect an I2C port expander to your Raspberry Pi 2 and create a simple app that uses the port expander to read the status of a tactile switch and control an LED. No background knowledge of I2C or port expanders is needed. If you want to know more about I2C, Sparkfun provides a great tutorial on I2C.
This is a headed sample, so please ensure that your device is in headed mode by running this command: setbootoption.exe headed (changing the headed/headless state will require a reboot).
Connect the I2C Port Expander to your device
You will need the following components :
1 Raspberry Pi 2
1 MCP23008 8-bit I/O Port Expander in PDIP package
1 red LED
An HDMI monitor
A breadboard and several male-to-female and male-to-male connector wires
Let’s start by wiring up the components on the breadboard as shown in the diagram below.
Note: Make sure to power off the RPi2 when connecting your circuit. This is good practice to reduce the chance of an accidental short circuit during construction.
Here is the schematic:
Connecting the MCP23008 Port Expander
Place the MCP23008 Port Expander on your breadboard such that it straddles the center gap of the breadboard.
Locate pin 1 of the port expander by finding the notch on the IC. If you orient the IC so that the end with the notch is facing left, pin 1 will be the first pin in the lower left below the notch.
The pinout of the MCP23008 is shown below and can be found in the datasheet.
Make the following connections on the MCP23008 Port Expander:
Pin 1 SCL: Connect to I2C1 SCL (Pin 5) on the RPi2 (pin mapping is below)
Pin 2 SDA: Connect to I2C1 SDA (Pin 3) on the RPi2
Pin 3 A2: Connect to the ground rail on the side of the breadboard (blue stripe)
Pin 4 A1: Connect to the ground rail on the side of the breadboard
Pin 5 A0: Connect to the ground rail on the side of the breadboard
Pin 6 Reset: Connect to the voltage supply rail on the side of the breadboard (red stripe)
Pin 9 VSS: Connect to the ground rail on the side of the breadboard
Pin 10 GP0: Connect to the cathode (the shorter leg) of the LED
Pin 11 GP1: Connect to one lead of the 10k Ω resistor and one pin of the tactile switch
Pin 18 VDD: Connect to the voltage supply rail on the side of the breadboard
Leave the remaining pins on the MCP23008 unconnected.
Connecting the LED
If not already connected, connect the cathode (the shorter leg) of the LED to Pin 10 of the MCP23008 Port Expander
Connect the anode (the longer leg) of the LED to one lead of the 330 Ω resistor
Connect the other end of the 330 Ω resistor to the voltage supply rail on the side of the breadboard (red stripe)
Connecting the Tactile Switch
If not already connected, connect one lead of the 10k Ω resistor to Pin 11 of the MCP23008 Port Expander
Connect the other end of the 10k Ω resistor to the voltage supply rail on the side of the breadboard (red stripe)
If not already connected, connect one pin of the tactile switch to Pin 11 of the MCP23008 Port Expander
Connect the other pin of the tactile switch to the ground rail on the side of the breadboard (blue stripe)
Connecting the Raspberry Pi 2
We need to hook up power, ground, and the I2C lines from on the Raspberry Pi 2 to the MCP23008 Port Expander and the breadboard.
Pin 1 3.3V PWR Connect to the voltage supply rail on the side of the breadboard (red stripe)
Pin 3 I2C1 SDA If not already connected, connect to Pin 2 of the MCP23008 Port Expander
Pin 5 I2C1 SCL If not already connected, connect to pin 1 of the MCP23008 Port Expander
Pin 6 GND Connect to the ground rail on the side of the breadboard (blue stripe)
The I2C bus requires pull-up resistors on the SDA and SCL lines. However, the Raspberry Pi 2 SDA and SCL pins we are using in this sample already have pull-up resistors connected on the RPi2, so we don’t need to add any additional external pull-ups. See the Raspberry Pi 2 pin mapping page for more details on the RPi2 IO pins.
Create the sample app
When everything is set up, power your device back on. You can find this sample here, but as an exercise, this tutorial will take you through the complete steps to create this app from scratch. Open up Visual Studio and create a new C# Windows Universal Blank App (see the ‘Hello World’ sample if you need guidance on how to create a new app). For this sample, we named ours I2cPortExpanderLedSample. The code in this sample does several things:
Initializes the I2C bus and the port expander
Communicates over I2C with the port expander to turn the LED on and off at regular intervals
Communicates over I2C with the port expander to check the status of the tactile switch (is it pressed or not) at regular intervals
Displays the LED on/off status and the tactile switch pressed/released status to the display attached to the Raspberry Pi 2
Stops flashing the LED when the tactile switch is pressed and restarts flashing the LED when the tactile switch is released
Checks if the user has changed the LED flash frequency and updates the LED flash frequency as needed
Add content to MainPage.xaml
Let’s add some content to the MainPage which will be displayed on a screen connected to the Raspberry Pi 2. We want to add a Circle, a couple TextBoxes and a Slider. The circle will emulate the on/off status of the LED. The Slider allows the user to control the frequency that the LED flashes. The Textboxes will provide info about the slider and report the tactile button status.
From Solution Explorer, select the MainPage.xaml file.
Locate the
<Grid>tag in the XAML section of the designer, and add the following markup:
<Grid Background="Black">
<StackPanel HorizontalAlignment="Center" VerticalAlignment="Center">
<Ellipse x:Name="Led" Fill="LightGray" Stroke="White" Width="100" Height="100" Margin="10"/>
<TextBlock x:Name="DelayText" Text="500ms" Margin="10" TextAlignment="Center" FontSize="26.667" />
<Slider x:Name="Delay" Width="200" Value="500" Maximum="1000" LargeChange="100" SmallChange="10" Margin="10" ValueChanged="Delay_ValueChanged" StepFrequency="10"/>
<TextBlock x:Name="ButtonStatusText" Text="Button Status: Initializing...." Margin="10,50,10,10" TextAlignment="Center" FontSize="26.667" />
</StackPanel>
</Grid>Add code to MainPage.xaml.cs
Before we add any code to MainPage.xaml.cs, we need to add a reference to the Windows IoT Extension SDK.
In Solution Explorer, right-click on References and select Add Reference…
In the Reference Manager window, click the arrow next to Windows Universal then click on Extensions
Place a check mark in the box next to Windows IoT Extension SDK and click OK
Open MainPage.xaml.cs from Solution Explorer (you may need to click on the arrow next to MainPage.xaml first)
Add the following lines at the top of MainPage.xaml.cs
using Windows.Devices.Enumeration;
using Windows.Devices.I2c;With the references add, lets start adding code. The complete code we implemented for MainPage.xaml.cs is located at end of this section. Below are some key parts of the code with explanations
Variables and Constants
// use these constants for controlling how the I2C bus is setup
private const string I2C_CONTROLLER_NAME = "I2C1"; //specific to RPI2
private const byte PORT_EXPANDER_I2C_ADDRESS = 0x20; // 7-bit I2C address of the port expander
private const byte PORT_EXPANDER_IODIR_REGISTER_ADDRESS = 0x00; // IODIR register controls the direction of the GPIO on the port expander
private const byte PORT_EXPANDER_GPIO_REGISTER_ADDRESS = 0x09; // GPIO register is used to read the pins input
private const byte PORT_EXPANDER_OLAT_REGISTER_ADDRESS = 0x0A; // Output Latch register is used to set the pins output high/low
private const double TIMER_INTERVAL = 500; // value is milliseconds and denotes the timer interval
private const double BUTTON_STATUS_CHECK_TIMER_INTERVAL = 50;
private byte LED_GPIO_PIN = 0x01; // using GPIO pin 0 on the port expander for the LED
private byte PUSHBUTTON_GPIO_PIN = 0x02; // using GPIO pin 1 on the port expander for reading the toggle button status
private byte iodirRegister; // local copy of I2C Port Expander IODIR register
private byte gpioRegister; // local copy of I2C Port Expander GPIO register
private byte olatRegister; // local copy of I2C Port Expander OLAT register
private I2cDevice i2cPortExpander;
private DispatcherTimer ledTimer;
private DispatcherTimer buttonStatusCheckTimer;
private bool isLedOn = false;
private bool isButtonPressed = false;
private SolidColorBrush redBrush = new SolidColorBrush(Windows.UI.Colors.Red);
private SolidColorBrush grayBrush = new SolidColorBrush(Windows.UI.Colors.LightGray);Here are what some of these constants and variables represent
I2C_CONTROLLER_NAMEholds the string constantI2C1which is the name of the I2C controller on the Raspberry Pi 2.PORT_EXPANDER_I2C_ADDRESSis the I2C address of the port expander we are using. *PORT_EXPANDER_IODIR_REGISTER_ADDRESS,PORT_EXPANDER_GPIO_REGISTER_ADDRESS,PORT_EXPANDER_OLAT_REGISTER_ADDRESSare the register addresses in the port expander that correspond to the IODIR register, GPIO register and OLAT register.*TIMER_INTERVALis the starting time interval in milliseconds between an LED on or off toggle.BUTTON_STATUS_CHECK_TIMER_INTERVALis the time interval in milliseconds between each check of the tactile switch statusiodirRegister,gpioRegisterandolatRegisterare our local copies of the values in the corresponding registers in the port expander.
* See the MCP23008 datasheet for details.
The method InitializeSystem()
InitializeSystem() does the following:
Sets up the I2C communications on the Raspberry Pi 2
Configures the port expander to be able to turn the LED on and off and to get the tactile switch status
Initializes the local copies of the port expander registers IODIR, GPIO and OLAT
Sets up two timers - One for controlling the LED and another for checking the tactile switch status
When complete, the variable i2cPortExpander will be our handle to the Raspberry Pi 2 I2C bus.
private async void InitializeSystem()
{
byte[] i2CWriteBuffer;
byte[] i2CReadBuffer;
byte bitMask;
// initialize I2C communications
try
{
var i2cSettings = new I2cConnectionSettings(PORT_EXPANDER_I2C_ADDRESS);
i2cSettings.BusSpeed = I2cBusSpeed.FastMode;
string deviceSelector = I2cDevice.GetDeviceSelector(I2C_CONTROLLER_NAME);
var i2cDeviceControllers = await DeviceInformation.FindAllAsync(deviceSelector);
i2cPortExpander = await I2cDevice.FromIdAsync(i2cDeviceControllers[0].Id, i2cSettings);
}
catch (Exception e)
{
System.Diagnostics.Debug.WriteLine("Exception: {0}", e.Message);
return;
}
// initialize I2C Port Expander registers
try
{
// initialize local copies of the IODIR, GPIO, and OLAT registers
i2CReadBuffer = new byte[1];
// read in each register value on register at a time (could do this all at once but
// for example clarity purposes we do it this way)
i2cPortExpander.WriteRead(new byte[] { PORT_EXPANDER_IODIR_REGISTER_ADDRESS }, i2CReadBuffer);
iodirRegister = i2CReadBuffer[0];
i2cPortExpander.WriteRead(new byte[] { PORT_EXPANDER_GPIO_REGISTER_ADDRESS }, i2CReadBuffer);
gpioRegister = i2CReadBuffer[0];
i2cPortExpander.WriteRead(new byte[] { PORT_EXPANDER_OLAT_REGISTER_ADDRESS }, i2CReadBuffer);
olatRegister = i2CReadBuffer[0];
// configure the LED pin output to be logic high, leave the other pins as they are.
olatRegister |= LED_GPIO_PIN;
i2CWriteBuffer = new byte[] { PORT_EXPANDER_OLAT_REGISTER_ADDRESS, olatRegister };
i2cPortExpander.Write(i2CWriteBuffer);
// configure only the LED pin to be an output and leave the other pins as they are.
// input is logic low, output is logic high
bitMask = (byte)(0xFF ^ LED_GPIO_PIN); // set the LED GPIO pin mask bit to '0', all other bits to '1'
iodirRegister &= bitMask;
i2CWriteBuffer = new byte[] { PORT_EXPANDER_IODIR_REGISTER_ADDRESS, iodirRegister };
i2cPortExpander.Write(i2CWriteBuffer);
}
catch (Exception e)
{
System.Diagnostics.Debug.WriteLine("Exception: {0}", e.Message);
return;
}
// setup our timers, one for the LED blink interval, the other for checking button status
try
{
ledTimer = new DispatcherTimer();
ledTimer.Interval = TimeSpan.FromMilliseconds(TIMER_INTERVAL);
ledTimer.Tick += LedTimer_Tick;
ledTimer.Start();
buttonStatusCheckTimer = new DispatcherTimer();
buttonStatusCheckTimer.Interval = TimeSpan.FromMilliseconds(BUTTON_STATUS_CHECK_TIMER_INTERVAL);
buttonStatusCheckTimer.Tick += ButtonStatusCheckTimer_Tick;
buttonStatusCheckTimer.Start();
}
catch (Exception e)
{
System.Diagnostics.Debug.WriteLine("Exception: {0}", e.Message);
return;
}
}The method FlipLED()
FlipLED() is called by the ledTimer whenever the LED timer has reached the end of its interval length. Initially, this is 500 milliseconds but can be changed by a user via the slider displayed on a monitor connected to the RPi2.
This method determines if the LED is currently on or off.
If the LED is currently off, it sends commands to the port expander to turn the LED on and sets the color of the circle on the display to red.
If the LED is currently on, it sends commands to the port expander to turn the LED off and sets the color of the circle on the display to gray.
private void FlipLED()
{
byte bitMask;
if (isLedOn == true)
{
// turn off the LED
isLedOn = false;
olatRegister |= LED_GPIO_PIN;
i2cPortExpander.Write(new byte[] { PORT_EXPANDER_OLAT_REGISTER_ADDRESS, olatRegister });
Led.Fill = grayBrush;
}
else
{
// turn on the LED
isLedOn = true;
bitMask = (byte)(0xFF ^ LED_GPIO_PIN);
olatRegister &= bitMask;
i2cPortExpander.Write(new byte[] { PORT_EXPANDER_OLAT_REGISTER_ADDRESS, olatRegister });
Led.Fill = redBrush;
}
}CheckButtonStatus() communicates with the port expander to get the tactile switch status. It reads the GPIO register on the port expander and checks the value of the second bit which corresponds to the status of the switch.
If the second bit of the GPIO register is ‘0’ then the switch is currently pressed.
If the second bit of the GPIO register is ‘1’ then the switch is currently released.
This method updates the text in Textbox displayed to the screen to reflect the status of the switch.
private void CheckButtonStatus()
{
byte[] readBuffer = new byte[1];
i2cPortExpander.WriteRead(new byte[] { PORT_EXPANDER_GPIO_REGISTER_ADDRESS }, readBuffer);
// a button press results in a logic low for the GPIO pin
if ((byte)(readBuffer[0] & PUSHBUTTON_GPIO_PIN) == 0x00 )
{
ButtonStatusText.Text = "Button Status: Pressed";
isButtonPressed = true;
}
else
{
ButtonStatusText.Text = "Button Status: Released";
isButtonPressed = false;
}
}Build, Deploy and Run the App
Let’s build, deploy and run the app on our Raspberry Pi 2.
If not already open, open in Visual Studio the app you created with the code above.
Set the ‘Remote Debugging’ setting to point to your device. See the ‘Hello World’ sample if you need guidance on how to do this.
Press ‘F5’ or click on the ‘Remote Machine’ button in the Visual Studio toolbar.
After several moments, you will see the screen attached to the RPi2 change to show a circle, some text, and a slider. The LED on the breadboard will begin to turn on and off.
Congratulations! You’ve successfully connected an I2C port expander to your Raspberry Pi 2.



Comments