





Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
This project aims to answer questions about the basic biology of native animal species in a vulnerable state. For that purpose, we design and develop equipment, carry out field monitoring, analyze the data we extract from our campaigns, and fit movement models to the obtained data.
About usWe are a group made up of biologists, physicists and engineers, and we have been working interdisciplinary for 5 years with different animal species, different habitats and challenges. We carry out our research at the Bariloche Atomic Center, San Carlos de Bariloche, Río Negro, Argentina.
... And how did we start?Five years ago I was developing theoretical models of animal movement under the supervision of Dr. Guillermo Abramson. Towards the second half of my Ph. D., it was necessary for me and for the research to start with real animal monitoring. We started by monitoring the marsupial Dromiciops gliroides in its natural habitat. This work turned out to be more than challenging given that this animal lives in the forest where there is no GPS signal, it weighs approximately 20 grams (which greatly limits the usable equipment) and it is a nocturnal animal (with which monitoring must be carried out during the night). We developed our own antennas to set up receiving stations and placed transmitters on individuals of D. gliroides.
Our project continued to grow and many ecology groups approached us asking if we could develop any monitoring systems that could be adapted to their context. We started to develop our own monitoring system including GPS, inertial sensors (accelerometer, gyroscope and magnetometer) and temperature sensor. On the one hand, we have grown in the research and development of our monitoring systems and, in addition, we have received the TinyML kits, which can also become tracking systems. Now, with SenseCAP K1100, we could put together a connected network of devices that simultaneously monitor animals.
Nowadays...Using those monitoring systems (which we will detail in the next section), we can obtain the trajectories of animals. In particular, we are now interested in monitoring a population of the tortoise Chelonoidis chilensis in its natural habitat, located in San Antonio Oeste, Río Negro, Argentina. This species is in a vulnerable state (IUCN 2014, https://www.iucnredlist.org/species/9007/12949680) and very little is known about its biology. We believe that by studying the system interdisciplinary (developing and implementing tracking devices, analyzing data and developing theoretical models) we can learn more about this species. Knowing how animals move, surveying their trajectories, finding their nests, studying how their behavior depends on external variables (such as temperature or wind, for example) are key to establishing guidelines that help their conservation.
We use devices that contain GPS and inertial sensors to monitor animal movement and determine their activity based on different variables (time of day, weather conditions, etc.). These devices may vary in technology and performance, but must be light and small enough to meet the requirements of each biological system. With this, the possibilities are reduced. We are going to present below the 2 monitoring systems with which we are working.
- Tracking system designed by our team. This device uses a CC1312R1F3RGZT microcontroller and contains GPS, inertial sensors, temperature sensors and a microphone (see schematic circuit "Animal monitoring system using CC1312R1F3RGZT microcontroller" in "Schematics and circuit diagrams"). We include code examples for the IMU module transmitting and receiving data for this device (see "Example code for transmitting/receiving IMU data" in the "Code" section). In this section we also include a Python code "Graphic user interface" to interactively display the temperature and accelerometer measurements. Using the first prototype that we developed for this device, we collected enough data to study the movement of the tortoise C. chilensis. With these results we have submitted the manuscript "Study of the movement of the vulnerable tortoise Chelonoidis chilensis monitored by complementary techniques".
In the next monitoring campaign (January 2023) we will use this device to track individuals and obtain new movement data. At the moment, data is stored in a memory, so we don't obtain the data until we retrieve the memory. Our goal is to employ long range-low power communication protocols as LoRa to be able to see animal behavior in real time.
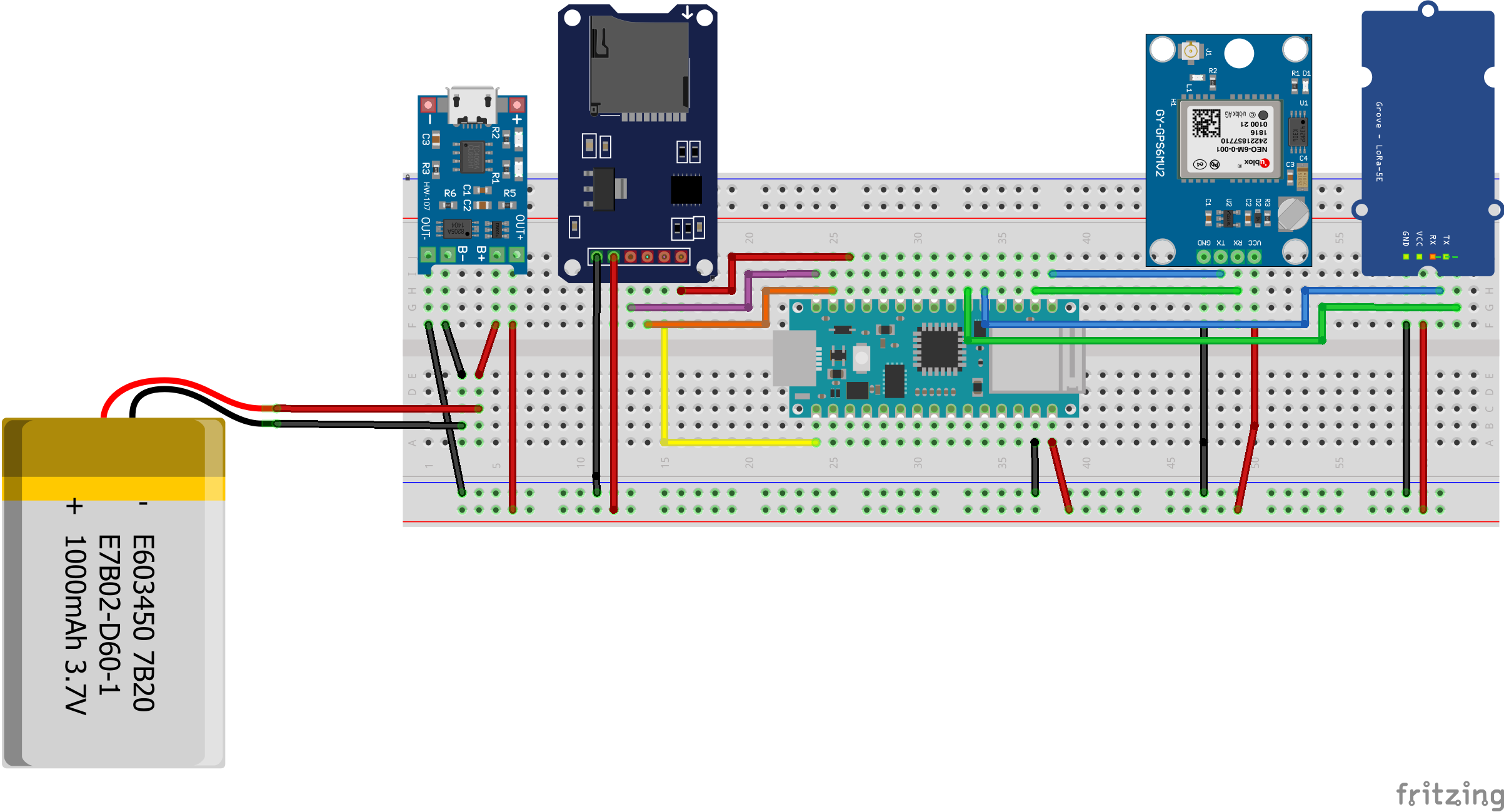
- TinyML kits + Edge Impulse. Our team is part of the TinyML network. Thanks to this spectacular initiative, we have received 10 TinyML kits which consist of, among other components, the Nano 33 BLE Sense which contains a 9 axis Inertial Measurement Unit (IMU) and temperature. Incorporating GPS, battery and memory, we can use as new animal monitoring devices. Using a sufficiently light and small monitoring device together with data analysis and machine learning algorithms, it is possible to determine the behavior of individuals in situ. Using the TinyML kits and the Edge Impulse platform, we were able to train a neural network to classify behavior of C. chilensis individuals. We use time series of accelerometers extracted from 5 monitoring campaigns of individuals of this species in their natural habitat. We designed a classification model using Keras to firstly distinguish motion from stillness. Subsequently, the objective is to distinguish different types of behavior: eating, walking, copulating, digging nests to lay eggs, etc. A concrete application of a study like this is to find the eggs deposited by the female and help in their conservation: by characterizing the accelerometer signal coming from the activity "digging nests to lay eggs" together with the location of the individual coming from the GPS, we can identify those deposition sites and protect the eggs from potential threats.
We have tested the classifier using a Wio terminal and Arduino code (see "Animal movement classifier using a NN trained with accelerometers" in "Code" section) with the movement of a captive tortoise. In this way, we can determine the result of the classification in real time and obtain the result ("Active" or "Inactive") on our cell phone via Bluetooth. Due to the weight and dimension of the Wio Terminal, we will use the TinyML kits on the field.
In field work, each individual is fitted with a device using camouflaged tape to prevent predation. Until now, the data is obtained once the memory of the device is removed. This procedure is the most heavy and time consuming task of the campaigns, as we have to locate animals which spread over a relatively large natural area with rough vegetation. Importantly, in doing so we also strongly perturb the natural behavior we want to study. Our goal is to employ long range-low power communication protocols as LoRa to be able to see animal behavior in real time.
We can incorporate the SenseCAP K1100 sensors to both monitoring system: the one developed by our team and the one implemented with TinyML kits. With enough LoRa devices, we could create a network connnecting them. This would allow us to send the stored information without having to closely approach the individual and without having to touch the mounted equipment, which is carefully camouflaged and secured. LoRa also brings the possibility to scale the study and monitor several individuals or “nodes” in real time, and for instance detect possible collective behavior. It could also be used to update devices settings, all these tasks in a non-intrusive way from one or several monitoring/control centers.
SenseCAP K1100 kit also opens new perspectives for sensor fusion that we have not explored yet, and to address the question of the effect of temperature, humidity and light on the behavior of tortoises. It is crucial to understand more about the movement of individuals to establish guidelines that help their conservation. Taking advantage of the benefits of the SenseCAP K1100, in parallel with the monitoring of the animals, we could measure variables of the environment in the natural habitat in which they live. For example, one type of tortoises shelter consist of burrows made under the ground. Now, we could measure the humidity of those places.
In addition to the implementation in tortoises, we have the goal of using it in other animal species in the wild as long as the devices meet the size and weight requirements. For instance, we are starting a collaboration with groups that study the behavior of small lizards and small birds.
To finish, it is important to say that we really like this project and there is still a lot to do. Contributing to the monitoring of different animal species using different technologies can be very valuable to learn more about the biology of each one and establish guidelines for their conservation in the case of vulnerable species.












_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)

{kind=link}
Comments