IntroductionSo every year for Halloween we have two options. We can either Treat... or we can Trick. For our group we decided to choose the second option and we created a Halloween box full of tricks.
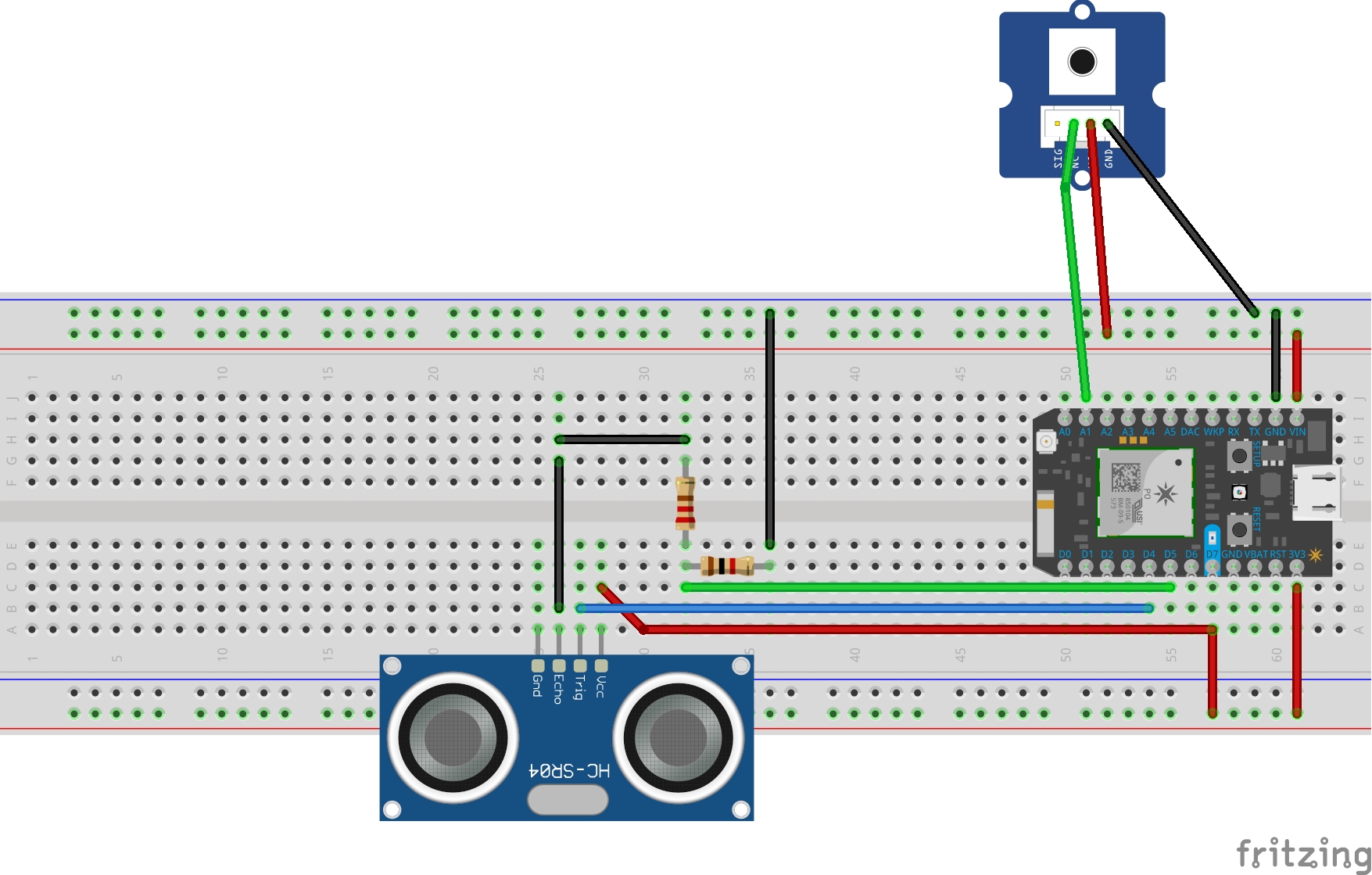
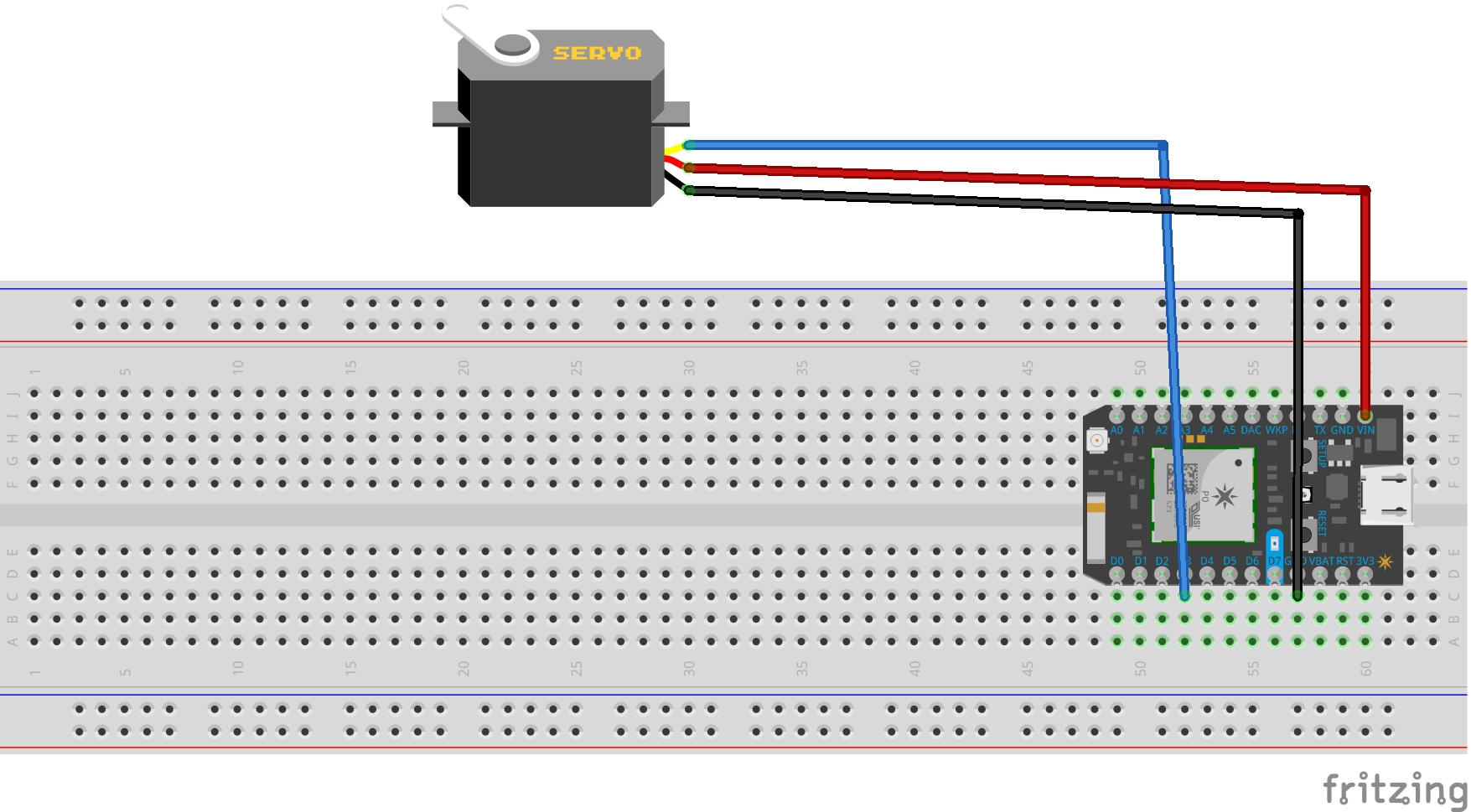
Why did we do this?This project consists of developing devices that collaborate together to detect motion from its surroundings within a certain distance. Once a child approaches the Halloween box, they must first press the button positioned on the exterior of the box which in return causes the servo motor attached to the interior of the box to activate, causing the lid to open. Then, the child will reach forward with hopes to acquire a piece of candy but to their surprise, the lid will begin to shut due to the motion received by the ultrasonic sensor.
How will this help?This project uses particle argons to transfer information and data by using the internet. The data the sensors provide help to gain a better understanding as to where the child is in relation to the Halloween box. This project would become very useful to an individual that has younger brothers and sisters that take all your candy.






_zhWsCcSEcl.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)















{kind=link}
{kind=link}
Comments