//By Marco Bobinger - 2020
//
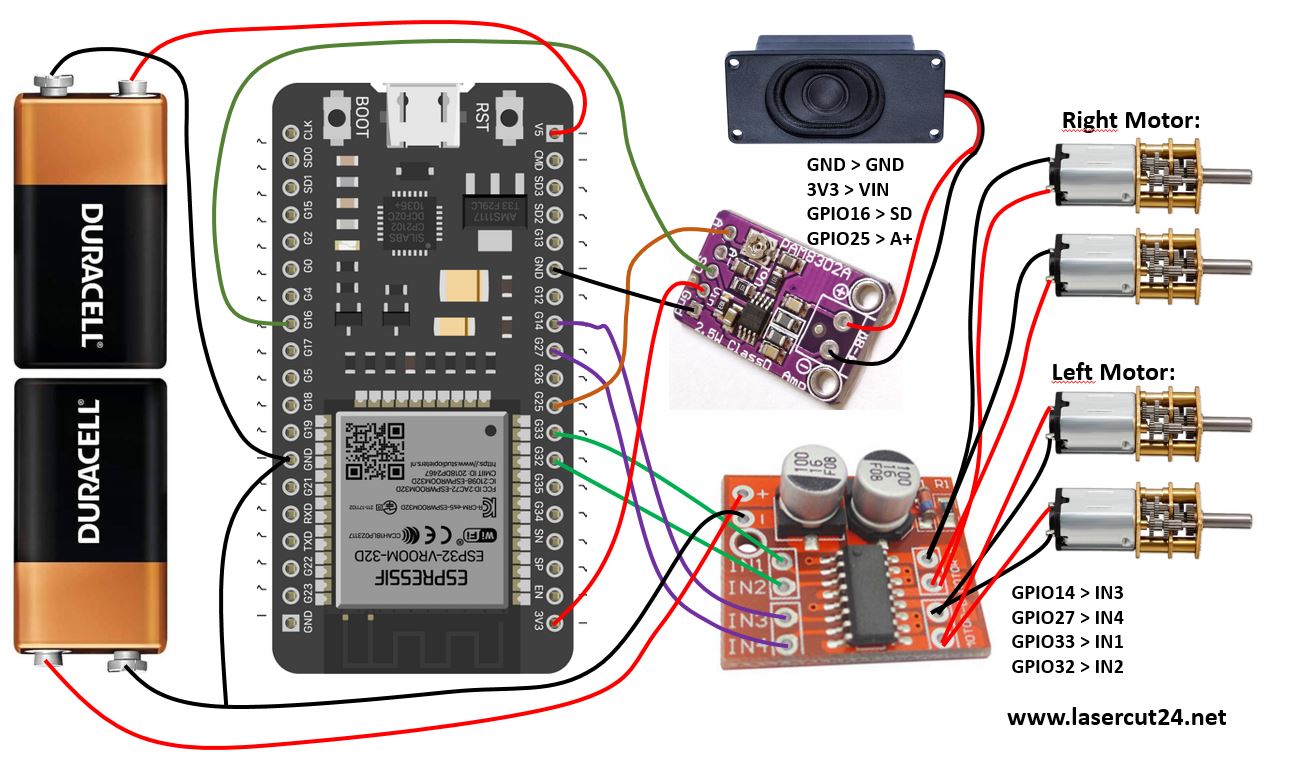
/*Pin assignment:
* GPIO16: Mute PM8302 sound card on SD (Shutdown PIN)
* GPIO25: DAC (digital-to-analog-converter) on A+ pin on PM8302
* VCC of PM8302 on 3.3V
* L298N Micro stepper card: right wheels on MOTOR A output of L298N
* L298N Micro stepper card: LEFT wheels on MOTOR B output of L298N
* Right Motor: see GPIO below
* Left motor: see GPIO below
*/
//This example creates a bridge between Serial and Classical Bluetooth (SPP)
//and also demonstrate that SerialBT have the same functionalities of a normal Serial
/*
F: Forward : 70
B: Back : 66
S: Stop : 83
L: Left : 76
R: Right : 82
I: Forward right : 73
J: Back right : 74
H: back left : 72
G: forward left : 71
u: u-turn : 117
t: u-turn : 116
M: Sound1 77
N: Sound2 78
O: Sound3 79
K: Light off 75
Z: light on 90
*/
#include "BluetoothSerial.h"
#include "hupen.h"
#include "XT_DAC_Audio.h"
int mutepin = 16;
XT_Wav_Class hupenclass(hupen);
XT_DAC_Audio_Class DacAudio(25,0);
#if !defined(CONFIG_BT_ENABLED) || !defined(CONFIG_BLUEDROID_ENABLED)
#error Bluetooth is not enabled! Please run `make menuconfig` to and enable it
#endif
byte incoming;
int counter = 0;
int lightpin = 15;
//left motor
int rmotorpinA = 33; //change to 32
int rmotorpinB = 32;
//right motor
int lmotorpinA = 14; //change to 14
int lmotorpinB = 27;
BluetoothSerial SerialBT;
void stop() {
digitalWrite(rmotorpinA, LOW);
digitalWrite(rmotorpinB, LOW);
digitalWrite(lmotorpinA, LOW);
digitalWrite(lmotorpinB, LOW);
}
void setup() {
Serial.begin(115200);
SerialBT.begin("Lasercut24 - 2912"); //Bluetooth device name
Serial.println("The device started, now you can pair it with bluetooth!");
//pin settings for digitalwrite GPIO Pins
pinMode(rmotorpinA, OUTPUT);
pinMode(rmotorpinB, OUTPUT);
pinMode(lmotorpinA, OUTPUT);
pinMode(lmotorpinB, OUTPUT);
pinMode(mutepin, OUTPUT);
pinMode(lightpin, OUTPUT);
digitalWrite(mutepin, LOW);
}
void loop() {
/*
if (Serial.available()) {
SerialBT.write(Serial.read());
}
if (SerialBT.available()) {
Serial.write(SerialBT.read());
}
*/
if (SerialBT.available()) {
incoming = SerialBT.read();
Serial.println(incoming);
counter = 0;
}
if (incoming == 70)
{
Serial.println("Driving forward");
SerialBT.println("Forward");
digitalWrite(rmotorpinA, LOW);
digitalWrite(rmotorpinB, HIGH);
digitalWrite(lmotorpinA, LOW);
digitalWrite(lmotorpinB, HIGH);
}
if (incoming == 66)
{
Serial.println("Driving back");
SerialBT.println("Back");
digitalWrite(rmotorpinA, HIGH);
digitalWrite(rmotorpinB, LOW);
digitalWrite(lmotorpinA, HIGH);
digitalWrite(lmotorpinB, LOW);
}
if (incoming == 83)
{
Serial.println("Stopping now");
SerialBT.println("Stopping");
digitalWrite(rmotorpinA, LOW);
digitalWrite(rmotorpinB, LOW);
digitalWrite(lmotorpinA, LOW);
digitalWrite(lmotorpinB, LOW);
}
delay(20);
if (incoming == 76)
{
Serial.println("Driving left");
SerialBT.println("Left");
digitalWrite(rmotorpinA, LOW);
digitalWrite(rmotorpinB, HIGH);
digitalWrite(lmotorpinA, LOW);
digitalWrite(lmotorpinB, LOW);
}
if (incoming == 82)
{
Serial.println("Driving right");
SerialBT.println("Right");
digitalWrite(rmotorpinA, LOW);
digitalWrite(rmotorpinB, LOW);
digitalWrite(lmotorpinA, LOW);
digitalWrite(lmotorpinB, HIGH);
}
if (incoming == 73)
{
Serial.println("Forward right");
SerialBT.println("F-Right");
if (counter >= 1)
{
counter = 0;
digitalWrite(rmotorpinA, LOW);
digitalWrite(rmotorpinB, LOW);
delay(100);
}
else if (counter < 1)
{
counter = counter + 1;
digitalWrite(rmotorpinA, LOW);
digitalWrite(rmotorpinB, HIGH);
}
digitalWrite(lmotorpinA, LOW);
digitalWrite(lmotorpinB, HIGH);
}
if (incoming == 74)
{
Serial.println("Back right");
SerialBT.println("B-Right");
if (counter >= 1)
{
counter = 0;
digitalWrite(rmotorpinA, LOW);
digitalWrite(rmotorpinB, LOW);
delay(100);
}
else if (counter < 1)
{
counter = counter + 1;
digitalWrite(rmotorpinA, HIGH);
digitalWrite(rmotorpinB, LOW);
}
digitalWrite(lmotorpinA, HIGH);
digitalWrite(lmotorpinB, LOW);
}
if (incoming == 72)
{
Serial.println("Back left");
SerialBT.println("B-Left");
digitalWrite(rmotorpinA, HIGH);
digitalWrite(rmotorpinB, LOW);
if (counter >= 1)
{
counter = 0;
digitalWrite(lmotorpinA, LOW);
digitalWrite(lmotorpinB, LOW);
delay(100);
}
else if (counter < 1)
{
counter = counter + 1;
digitalWrite(lmotorpinA, HIGH);
digitalWrite(lmotorpinB, LOW);
}
}
if (incoming == 71)
{
Serial.println("Forward left");
SerialBT.println("F-Left");
digitalWrite(rmotorpinA, LOW);
digitalWrite(rmotorpinB, HIGH);
if (counter >= 1)
{
counter = 0;
digitalWrite(lmotorpinA, LOW);
digitalWrite(lmotorpinB, LOW);
delay(100);
}
else if (counter < 1)
{
counter = counter + 1;
digitalWrite(lmotorpinA, LOW);
digitalWrite(lmotorpinB, HIGH);
}
}
if (incoming == 117) // u turn with letter u
{
SerialBT.println("U-turn");
Serial.println("U-turn");
digitalWrite(rmotorpinA, LOW);
digitalWrite(rmotorpinB, HIGH);
digitalWrite(lmotorpinA, HIGH);
digitalWrite(lmotorpinB, LOW);
}
if (incoming == 116) // u turn with letter t
{
SerialBT.println("U-turn");
Serial.println("U-turn");
digitalWrite(rmotorpinA, HIGH);
digitalWrite(rmotorpinB, LOW);
digitalWrite(lmotorpinA, LOW);
digitalWrite(lmotorpinB, HIGH);
}
if (incoming == 77) // Play sound 1
{
digitalWrite(mutepin, HIGH);
Serial.println("Now Playing Sound 1");
SerialBT.println("Sound 1");
DacAudio.FillBuffer();
if(hupenclass.Playing==false){
DacAudio.Play(&hupenclass);
incoming = 0;
digitalWrite(mutepin, LOW);
}
}
if (incoming == 89)
{
SerialBT.println("Muting");
Serial.println("Muting");
digitalWrite(mutepin, LOW);
}
if (incoming == 90)
{
SerialBT.println("Light on");
Serial.println("Light on");
digitalWrite(lightpin, HIGH);
}
if (incoming == 75)
{
SerialBT.println("Light off");
Serial.println("Light off");
digitalWrite(lightpin, LOW);
}
}










{kind=link}
Comments