


The project description is quoted here to help show how the proposed system meets the described needs.
"The challenge is to leverage advanced technologies from low latency networks, ultra high speed networks, secure IoT networks, software defined networks, high definition video and imaging, autonomous drones, and new algorithms to address
1) early detection,
2) early response solutions,
3) and predictive, real-time data analysis around harmful algal blooms. Learn more about global impact of harmful algal blooms here.
Develop practical wireframe solutions, such as devices, processes, hardware innovations or digital tools, that can enable 1) the measurement, control and/or capture of phosphorus and nitrogen compounds in watersheds, 2) the prevention of excessive agricultural runoff, and/or 3) the measurement, mitigation or elimination of the environmental impacts of HABs."
see also: http://cimss.ssec.wisc.edu/goes/blog/archives/16311
In the interest of serving all three of the goals we suggest the combined system that monitors water quality and documents HAB conditions with aerial high resolution photography.
System Description
A buoy that tethers a drone, acting as both monitoring station and radio station, linking a series of drone buoys together to communicate location and autonomously move, in order to measure and locate the highest concentrations of nitrogen and phosphorus. This data connected system of buoys records and transmits the total accumulated data to the cloud. The drone on each buoy receives power for flight through a tether, enabling a much longer flight time than conventional drones that must carry a battery in flight.
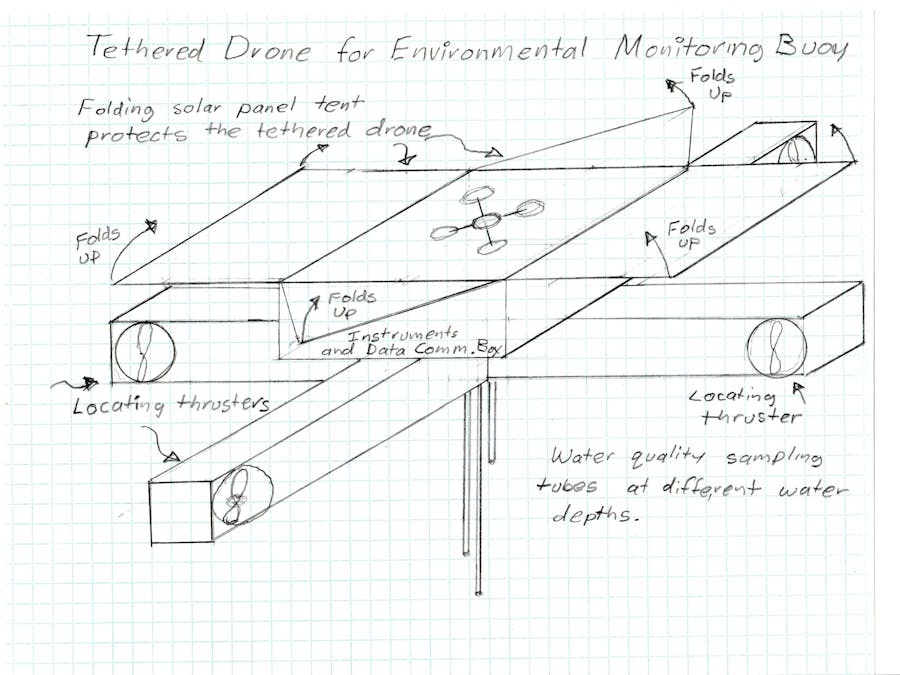
The buoy would be made of a float that would serve as a landing platform and battery storage for the drone. A series of solar panels collect energy from sunlight to power the drone and its camera and the solar panels have an automatically folding tent-like structure to act as guard for the drone and the buoy.
Below the float, three tubes would extend into the water to three different depths to measure oxygen level, nitrogen level, phosphorus level, temperature, water flow speed and any other desired water quality measurements.
Additionally the buoy will have 4 propellers submerged 14 inches into the water , to allow the buoy to move to detect changing concentrations of nitrogen and phosphorus in coordination with other buoys in the combined monitoring system.
These buoys with autonomous laboratory quality instrumentation would work as a "hive" to collect water data and determine if an area is of high interest. Once a determined threat concentration is determined the "hive" starts buzzing.
On the buoy is a stand which sits a drone tethered to the buoy. At 30 minute increments, or due to sharp spikes in concentration of phosphorus , nitrogen or other measured water quality indicators, measured by the instruments, the drone rises and starts an active 360 video captures the conditions of the water in the area around and below the drone.
The drone remains in flight to monitor until 80% of it's power have been exhausted at which time it will settle to it's stand and transmits compressed video data and water sensor data. As one lands another drone in the hive system takes flight allowing a continuous monitoring of the problem area.
The automated tethered drone puts camera and sensors in areas that are hard or difficult to reach, and working as a concentrated group allows for a continuous time-lapse of environmental effects too subtle for the human eye.
We hope that ideas like this can contribute to a solution to the many environmental hazards and problems caused by HABs. Thank you for your time and consideration.


Comments