


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 14 | |||
| × | 15 | ||||
 |
| × | 2 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
As the technology is in a continuous development and more and more people are working at a desk, the need of having a comfortable environment and, why not, also enjoyable, becomes more natural.
Our project comes as a help for anyone working long hours at a desk, offering support for:
- a desk lamp that works in two modes: manual(turned on/off by the user) and auto(turning on when motion is detected, and turning off otherwise to save light when it is not needed)
- a fan that also works in two modes: manual((turned on/off by user) and auto(the fan starts when the temperature goes above 21 degrees Celsius, and stops when the temperature drops below this limit)
- a timer, as in the Pomodoro technique for those of us struggling with being productive.
All these functionalities are accessible from a web interface.
The user can enable the working mode for the lamp and fan by pushing on buttons.
To set the pomodoro alarm we need to specify the time limit, in minutes.When it is set, a count-down timer will be visible on the interface, so the user can see the remaining time.
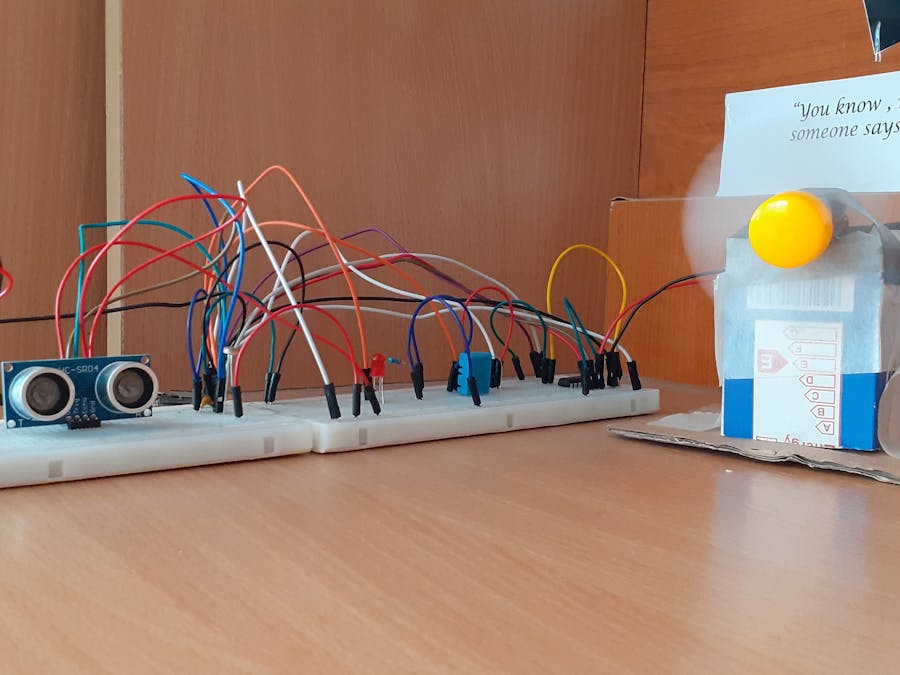
Here it is a video which demonstrate each functionality. Unfortunately, in this video we were not able to show the automatic mode of the fan due to the DHT11 sensor that failed. But we can say for sure that the module works fine with a new sensor, the tests we did initially prove it.
Here are some photos of our project.
For this project you will have to install some extra modules. Use the written commands in a terminal.
Project Structure
In folder scripts you will need to put all the python scripts, other than SmartDesk.py.
In folder templates you will need to put the index.html file.
And in static you will need to put the javascript code.
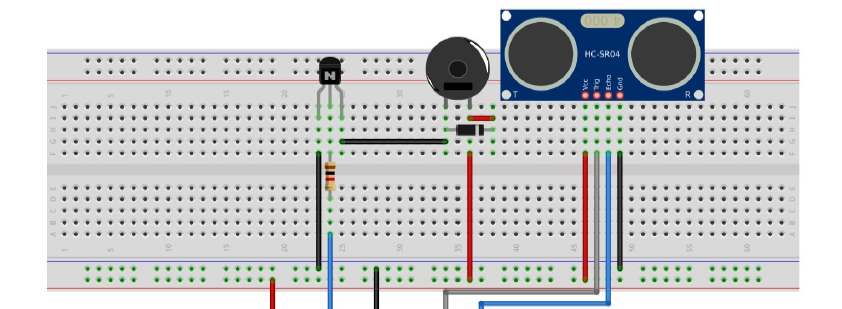
Buzzer and ultrasonic
- emitter: ground (black)
- base: pin 12 (blue)
- collector: to negative pin buzzer (black)
Buzzer:
- positive pin: to 5V power (red)
Ultrasonic:
- VCC: to 3.3V power(red)
- trigger: pin 36 (gray)
- echo: pin 38 (blue)
- ground: to the ground (black)
Diode: parallel with the buzzer
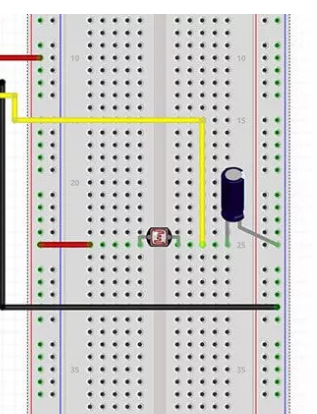
Light sensor schematic
- pin 1: to 3.3V power (red)
Capacitor:
- One wire to the ground, we use a ceramic capacitor, so, the way we put the capacitor in the circuit doesn't matter
Yellow wire:
- to pin 40
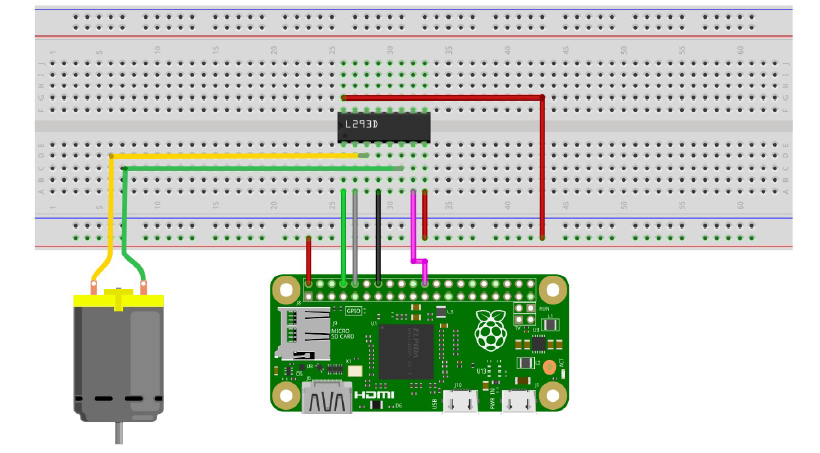
DC motor schematic
- VSS: to 5V power (red)
- EN1: to pin 8 (green)
- IN1: to pin 10 (gray)
- OUT1: to positive wire DC motor (yellow)
- GND: to ground (black)
- OUT2: to negative wire DC motor (green)
- IN2: to pin 22 (purple)
- VS: to 5V power (red)
Alarm_Driver.py
Python# Proiect SM Smart Desk
# grupa 1309B
# membri: Atomei Georgiana, Bacica Florin, Ciulei Virgil, Turcas Irina
# autor modul: Turcas Irina
import time
import pigpio
import sys
pi = pigpio.pi()
# pin-ul folosit de buzzer este unul care genereaza
# un cloc$ caz acesta fiind GPIO18, adica pinul 12
buzzer = 18
def suna(minute):
try:
print("S-a pornit timerul pentru alarma")
time.sleep(minute)
print("Suna alarma!")
while True:
# buzzerul este activ cat timp nu s-au
# scurs 5.$ arg2=700Hz (f mai mare ->
# sunet mai inalt) arg3=50%FU (FU mai
# mic -> buzzerul primeste s$ un
# interval mai mic al clockului)
pi.hardware_PWM(buzzer, 700, 500000)
time.sleep(0.13)
pi.hardware_PWM(buzzer, 0, 0)
time.sleep(0.1)
pi.hardware_PWM(buzzer, 900, 500000)
time.sleep(0.15)
pi.hardware_PWM(buzzer, 0, 0)
time.sleep(1.5)
except KeyboardInterrupt:
pi.hardware_PWM(buzzer, 0, 0)
if __name__=='__main__':
lista_optiuni = ['help', '-help', '--help', 'h', '-h', '--h']
if len(sys.argv) is 2:
if sys.argv[1].lower() in lista_optiuni:
print('Script care activeaza alarma buzzer: $alarma.py [minute]')
print('Se recomanda rularea scriptului in fundal')
exit(0)
else:
timp = float(sys.argv[1]) * 60
else:
if len(sys.argv) is 1:
timp = 3 # 25 * 60s
else:
print('Scriptul poate lua maxim 2 argumente.')
exit(0)
# apelez functia de alarma
suna(timp)
# Proiect SM Smart Desk
# grupa 1309B
# Membri: Atomei Georgiana, Bacica Florin, Ciulei Virgil, Turcas Irina
# Autor modul: Ciulei Virgil
# Fan management module
import RPi.GPIO as GPIO
import time
FAN_SPEED = 14
DIRA = 15
DIRB = 25
pwmPIN = any
def init_FAN_driver():
global pwmPIN
pwnPIN = any
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setup(FAN_SPEED, GPIO.OUT)
GPIO.setup(DIRA, GPIO.OUT)
GPIO.setup(DIRB, GPIO.OUT)
GPIO.setwarnings(False)
pwmPIN = GPIO.PWM(FAN_SPEED, 100)
pwmPIN.start(0)
def deinit_FAN_driver():
GPIO.cleanup() # clean driver
def stop_fan():
change_fan_power(0,0)
def change_fan_power(fan_pwm, direction):
global pwmPIN
pwmPIN.ChangeDutyCycle(fan_pwm)
if direction == 1:
GPIO.output(DIRA, GPIO.HIGH)
GPIO.output(DIRB, GPIO.LOW)
GPIO.setwarnings(False)
else:
GPIO.output(DIRA, GPIO.LOW)
GPIO.output(DIRB, GPIO.HIGH)
GPIO.setwarnings(False)
# doar pentru testare
if __name__ == '__main__': # test main
counter = 0
while counter < 100:
counter += 1
# intr o directie pana la max si inapoi
for i in range(1, 100):
change_fan_power(i, 1)
time.sleep(0.2)
for i in range(100, 1):
change_fan_power(i, 1)
time.sleep(0.2)
# in cealalta direcctie pana la max si inapoi
for i in range(1, 100):
change_fan_power(i, 0)
time.sleep(0.2)
for i in range(100, 1):
change_fan_power(i, 0)
time.sleep(0.2)
deinit_FAN_driver()
# Proiect Smart desk
# grupa 1309B
# membri: Atomei Georgiana, Bacica Florin, Ciulei Virgil, Turcas Irina
# autor modul: Ciulei Virgil
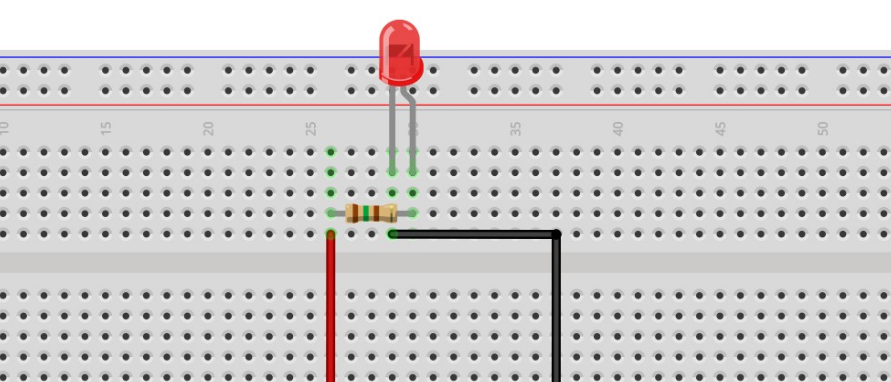
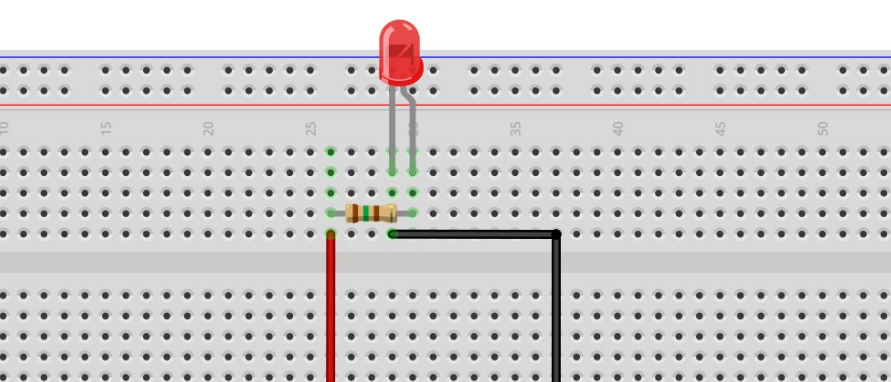
# Led on/off module
# Pin led: 17 bcm, 11 board
import RPi.GPIO as GPIO
import time
led = 17
def init_led_driver():
global led
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setup(led, GPIO.OUT)
GPIO.output(led, GPIO.HIGH)
def turn_on_led():
global led
GPIO.output(led, GPIO.LOW) # aprind LED
GPIO.setwarnings(False)
def turn_off_led():
global led
GPIO.output(led, GPIO.HIGH) # opresc LED
GPIO.setwarnings(False)
# doar pentru test
if __name__ == '__main__':
init_led_driver()
while 1:
try:
print("S-a aprins led-ul")
turn_on_led()
time.sleep(2)
print("S-a stins led-ul")
turn_off_led()
time.sleep(2)
except KeyboardInterrupt:
break
# Proiect SM Smart Desk
# grupa 1309B
# Membri: Atomei Georgiana, Bacica Florin, Ciulei Virgil, Turcas Irina
# Autor modul: Bacica Florin
# Light sensor management module
# Pini alesi: 21 bcm sau 40 board
import RPi.GPIO as GPIO
import time
light_sensor = 21
# pe circuit o sa avem senzorul si capacitorul si rezistenta lui se masoara in functie de
# cat de repede se descarca capacitorul
def init_light_sensor_driver():
GPIO.setmode(GPIO.BCM)
def rc_time():
count = 0
GPIO.setwarnings(False)
GPIO.setup(light_sensor, GPIO.OUT)
GPIO.output(light_sensor, GPIO.LOW)
time.sleep(0.1)
GPIO.setwarnings(False)
GPIO.setup(light_sensor, GPIO.IN)
while (GPIO.input(light_sensor) == GPIO.LOW):
count += 1
#cand e foarte intuneric valoarea count devine foarte mare asa
# ca ii vom pune o valoare maxima, peste care daca trece e
# intuneric sigur
if count == 50:
break
return count
#doar pentru teste
def run():
init_light_sensor_driver()
while 1:
try:
time = rc_time()
print(time)
except KeyboardInterrupt:
break
if __name__ == '__main__':
run()
Motion_Sensor_Appl.py
Python# Proiect SM Smart Desk
# grupa 1309B
# membri: Atomei Georgiana, Bacica Florin, Ciulei Virgil, Turcas Irina
# autor modul: Ciulei Virgil, Bacica Florin
# Moving sensor Management
# pini: 16(bcm) 36(board) trigger, 20(bcm), 38(board) echo
import RPi.GPIO as GPIO
import time
from scripts import LED_Driver as led
from scripts import Light_sensor_Driver as light
TRIGGER_PIN = 16
ECHO_PIN = 20
def init_motion_appl():
GPIO.setmode(GPIO.BCM)
GPIO.setwarnings(False)
GPIO.setup(TRIGGER_PIN, GPIO.OUT)
GPIO.setwarnings(False)
GPIO.setup(ECHO_PIN, GPIO.IN)
def trigger_conversion():
start_t = 0
stop_t = 0
GPIO.output(TRIGGER_PIN, GPIO.HIGH)
time.sleep(0.00001)
GPIO.output(TRIGGER_PIN, GPIO.LOW)
start_t = time.time()
stop_t = time.time()
while GPIO.input(ECHO_PIN) == 0:
start_t = time.time()
while GPIO.input(ECHO_PIN) == 1:
stop_t = time.time()
durata = stop_t - start_t
dist = durata * 342 / 2 * 100
return dist
def init_listen_state():
print("Distante primite in starea de init")
start_time_listen = time.time()
stop_time_listen = time.time()
min_distance = trigger_conversion()
max_distance = min_distance
while (stop_time_listen - start_time_listen) < 5: # 5 secunde pentru calibrare
time.sleep(0.5)
trigger = trigger_conversion()
if trigger < min_distance:
min_distance = trigger
if trigger > max_distance:
max_distance = trigger
stop_time_listen = time.time()
print("Valorea minima : ", min_distance)
print("Valorea maxima : ", max_distance)
return min_distance, max_distance
def active_state(min_d, max_d):
trig = trigger_conversion()
eroare = 15.0
if trig < (max_d - eroare):
print("Distanta:"+str(trig))
return True
return False
def run():
# init and listen to some datas
led.init_led_driver()
led.turn_off_led()
init_motion_appl()
(min_dist, max_dist) = init_listen_state()
while 1:
time.sleep(1)
try:
lighting = light.rc_time()
# se intra in if doar daca se detecteaza miscare si este intuneric in camera
if active_state(min_dist, max_dist) and lighting == 50 :
print("A aparut un obiect si e intuneric in camera")
print("Ledul s-a aprins!")
# turn on the led
led.turn_on_led()
start_time_listen = time.time()
stop_time_listen = start_time_listen
while (stop_time_listen - start_time_listen) < 30.0:
#daca inca avem ceva in raza de actiune atunci nu se cronometreaza nimic, timpii raman la fel si
#se va sta in acest while pana nu e nimic in raza de actiune si au trecut 10 sec
time.sleep(1)
if active_state(min_dist, max_dist):
start_time_listen = time.time()
stop_time_listen = start_time_listen
else:
stop_time_listen = time.time()
#iese din while doar daca nu e nimic in fata senzorului si au trecut 10 secunde decand nu e nimic acolo
print("Au trecut 30 secunde decand nu s-a mai detectat miscare!")
print("Ledul s-a stins!")
# turn of the led
led.turn_off_led()
except KeyboardInterrupt:
break
# pentru test
if __name__ == '__main__':
run()
Opreste_alarma.py
Pythonimport signal
import os
import subprocess
try:
pids = bytes(subprocess.check_output('pgrep -f \'Alarma_Driver.py\'', shell=True))
pids = pids.split(b'\n')
print(pids)
for pid in pids:
try:
os.kill(int(pid), signal.SIGINT)
except Exception as e:
print(e)
except KeyboardInterrupt:
print('Alarma a fost oprita')
# Proiect SM Smart Desk
# grupa 1309B
# membri: Atomei Georgiana, Bacica Florin, Ciulei Virgil, Turcas Irina
# autor modul: Ciulei Virgil
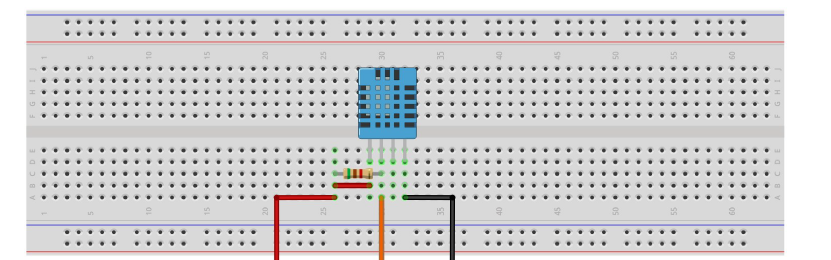
# Temperature sensor management module
# pini: 26 bcm, 37 board
import RPi.GPIO as GPIO
import Adafruit_DHT
from scripts import FAN_Driver as fan
import time
dht11 = 26
type = Adafruit_DHT.DHT11
def init_temp_driver():
global dht11
GPIO.setmode(GPIO.BCM)
GPIO.setup(dht11, GPIO.IN)
def deinit_temp_driver():
GPIO.cleanup()
def trigger_conv_temp():
global dht11
global type
tmp, temperature = Adafruit_DHT.read_retry(type, dht11)
return temperature
def run():
init_temp_driver()
print("Temperatura de dupa care se porneste sezorul este de 20 de grade")
try:
while 1:
try:
time.sleep(0.5)
temperature = trigger_conv_temp()
if temperature is not None:
print("Temperatura:"+str(temperature))
if temperature > 20:
print("Ventilator pornit!")
fan.change_fan_power(50, 0)
else:
print("Ventilator oprit!")
fan.change_fan_power(0,0)
except RuntimeError:
continue
except KeyboardInterrupt:
deinit_temp_driver()
if __name__ == '__main__':
run()
SmartDesk.py
Pythonfrom flask import Flask, render_template, request, Response
from scripts import LED_Driver, FAN_Driver, Light_sensor_Driver, Motion_Sensor_Appl, Temp_Sensor_Appl, Alarma_Driver
import multiprocessing
app = Flask(__name__)
fan_init = False
temp_init = False
motion_init = False
automated_air = None
pomodoro_alarm = None
motion_light = None
# initializam drivere pentru obiectele folosite
LED_Driver.init_led_driver()
Motion_Sensor_Appl.init_motion_appl()
Temp_Sensor_Appl.init_temp_driver()
FAN_Driver.init_FAN_driver()
@app.route('/')
def index():
return render_template('index.html')
@app.route('/automated-light', methods=['POST'])
def automatedLight():
# initializam modulul de functionare automata
global motion_init
global motion_light
if not motion_init:
motion_light = multiprocessing.Process(target=Motion_Sensor_Appl.run)
motion_init=True
#pornim thread cu functionarea automata
motion_light.start()
return Response(status=200)
@app.route('/manual-light-start', methods=['POST'])
def manualLightStart():
#daca este pornita functionarea automata, o oprim
#senzor de miscare
global motion_init
global motion_light
if motion_init:
motion_light.terminate()
motion_light=None
motion_init=False
#pornim functionarea manuala
LED_Driver.turn_on_led()
return Response(status=200)
@app.route('/manual-light-stop', methods=['POST'])
def manualLightStop():
# oprire led daca acesta functioneaza
LED_Driver.turn_off_led()
return Response(status=200)
@app.route('/manual-air-start', methods=['POST'])
def manualAirStart():
global temp_init
global automated_air
global fan_init
#daca este pornita functionarea automata, trebuie inchisa
if temp_init:
automated_air.terminate()
automated_air = None
temp_init = False
# pornire ventilator
FAN_Driver.change_fan_power(50,1)
fan_init = True
return Response(status=200)
@app.route('/manual-air-stop', methods=['POST'])
def manualAirStop():
global fan_init
# oprire ventilator
if fan_init: #functionarea manuala poate fi oprita doar daca functioneaza
FAN_Driver.stop_fan()
fan_init = False
return Response(status=200)
@app.route('/automated-air', methods=['POST'])
def automatedAir():
#oprirea functionarii manuale, daca aceasta este pornita
global temp_init
global automated_air
manualAirStop()
if not temp_init:
#pornirea functionarii automate
automated_air = multiprocessing.Process(target = Temp_Sensor_Appl.run)
automated_air.start()
temp_init = True
return Response(status=200)
@app.route('/start-alarm', methods=['POST'])
def pomodoroAlarm():
global pomodoro_alarm
# daca avem alta alarma setata, o oprim
if pomodoro_alarm:
pomodoro_alarm.terminate()
# extragem timpul setat in interfata
time = request.json['oraAlarma']
if time.isnumeric() and int(time)>0: #verificam timpul sa fie introdus corect
time=int(time) #pornim thread nou cu alarma
pomodoro_alarm = multiprocessing.Process(target=Alarma_Driver.suna, args=[time*60,])
pomodoro_alarm.start()
return Response(status=200)
@app.route('/stop-alarm', methods=['POST'])
def stopPomodoroAlarm():
global pomodoro_alarm
# daca avem alta alarma setata, o oprim
if pomodoro_alarm is not None:
pomodoro_alarm.terminate()
pomodoro_alarm = None
return Response(status=200)
if __name__ == '__main__':
app.run(host='0.0.0.0')
if automated_air:
automated_air.terminate()
if pomodoro_alarm:
pomodoro_alarm.terminate()
if motion_light:
motion_light.terminate()
# deinit drivers
FAN_Driver.deinit_FAN_driver()
Temp_Sensor_Appl.deinit_temp_driver()
script.js
JavaScriptfunction startManualLight() {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function () {
if (this.readyState == 4 && this.status == 200) {
}
};
xhttp.open("POST", "/manual-light-start", true);
xhttp.send();
}
function startAutoLight() {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function () {
if (this.readyState == 4 && this.status == 200) {
}
};
xhttp.open("POST", "/automated-light", true);
xhttp.send();
}
function stopManualLight() {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function () {
if (this.readyState == 4 && this.status == 200) {
}
};
xhttp.open("POST", "/manual-light-stop", true);
xhttp.send();
}
function startManualAir() {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function () {
if (this.readyState == 4 && this.status == 200) {
}
};
xhttp.open("POST", "/manual-air-start", true);
xhttp.send();
}
function stopManualAir() {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function () {
if (this.readyState == 4 && this.status == 200) {
}
};
xhttp.open("POST", "/manual-air-stop", true);
xhttp.send();
}
function automatedAir() {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function () {
if (this.readyState == 4 && this.status == 200) {
}
};
xhttp.open("POST", "/automated-air", true);
xhttp.send();
}
function startPomodoroAlarm() {
var xhttp = new XMLHttpRequest();
let time=document.getElementById("oraAlarma").value
xhttp.onreadystatechange = function () {
if (this.readyState == 4 && this.status == 200) {
startCount(time)
}
};
xhttp.open("POST", "/start-alarm", true);
xhttp.setRequestHeader("Content-Type", "application/json;charset=UTF-8");
xhttp.send(JSON.stringify({ "oraAlarma":time}));
}
function stopPomodoroAlarm() {
var xhttp = new XMLHttpRequest();
xhttp.onreadystatechange = function () {
if (this.readyState == 4 && this.status == 200) {
stopCount();
}
};
xhttp.open("POST", "/stop-alarm", true);
xhttp.send();
}
var interval;
var alarm_set=false;
function startCount(time)
{
if(alarm_set)
{
stopCount();
}
alarm_set=true;
var start_date= new Date();
var countDownDate = new Date(start_date.getTime()+time*60000)
x = setInterval(function() {
// Get today's date and time
var now = new Date().getTime();
// Find the distance between now and the count down date
var distance = countDownDate - now;
// Time calculations for days, hours, minutes and seconds
var minutes = Math.floor((distance % (1000 * 60 * 60)) / (1000 * 60));
var seconds = Math.floor((distance % (1000 * 60)) / 1000);
// Display the result in the element with id="demo"
document.getElementById("count_down").innerHTML = "Au mai rămas: "+ minutes + "m " + seconds + "s "+"pâna la alarma.";
// If the count down is finished, write some text
if (distance < 0) {
stopCount();
}
}, 1000);
}
function stopCount()
{
clearInterval(x);
document.getElementById("count_down").innerHTML = "";
alarm_set=false;
}
<!DOCTYPE html>
<html lang="ro-RO">
<head>
<meta charset="UTF-8">
<title>Smart Desk</title>
<!-- <script src="{{ url_for('static', filename='script.js') }}"></script> -->
<script src="/static/script.js"></script>
</head>
<body style="margin:0px; padding-left: 5px;padding-right: 5px;" >
<div style="text-align:center;background-color: #C9DC87; margin: 0%;">
<h1 style="color:#006400;margin-top: 0px; padding-top: 5px;">Smart desk</h1>
<br/>
</div>
<hr>
<main style="padding: 3%;padding-top: 0%;">
<section class="light" style="color:#006400; padding-left: 20px">
<h2>Iluminare birou:</h2>
<div class="manuala" style="padding-left: 20px;">
<p style="font-family: 'Times New Roman'; font-size: 20px">Manual:</p>
<button style="height: 30px; margin-right: 20px" onclick="startManualLight()" >Aprindere</button>
<button style="height: 30px; margin-left: 20px" onclick="stopManualLight()" >Stingere</button>
</div>
<div class="automata" style="padding-left: 20px;">
<p style="font-family: 'Times New Roman'; font-size: 20px">Automat:</p>
<button onclick="startAutoLight()" style="height: 30px;">Pornire</button>
</div><br/>
</section>
<hr>
<section class="air" style="color:#006400; padding-left: 20px">
<h2>Ventilaie birou:</h2>
<div class="manuala" style="padding-left: 20px;">
<p style="font-family: 'Times New Roman'; font-size: 20px">Manual:</p>
<button onclick="startManualAir()" style="height: 30px; margin-right: 20px">Pornire</button>
<button onclick="stopManualAir()" style="height: 30px; margin-left: 20px">Oprire</button>
</div>
<div class="automata" style="padding-left: 20px;">
<p style="font-family: 'Times New Roman'; font-size: 20px">Automat:</p>
<button onclick="automatedAir()" style="height: 30px;">Pornire</button>
</div><br/><br/>
</section>
<hr>
<section class="alarm" style="color:#006400; padding-left: 20px">
<h2>Fii productiv! Folosete tehnica pomodoro i seteaz o alarm</h2>
<label for="oraAlarma" style="font-family: 'Times New Roman'; font-size: 18px">Introducei timpul (in minute) dupa care va suna alarma:</label>
<input type="number" name="oraAlarma" id="oraAlarma" value="25"><br/><br/>
<button onclick="startPomodoroAlarm()" style="height: 30px; margin-right: 20px" >Pornete alarma</button>
<button onclick="stopPomodoroAlarm()" style="height: 30px; margin-left: 20px" >Oprete alarma</button>
<br/><br/>
<div id="counter">
<h2 id="count_down" name="count_down"></h1>
</div>
</section>
<hr>
</main>
<footer style="background-color: #C9DC87;color:#006400;font-size: 18px;padding-left: 3%;padding-right: 3%;margin: 0%;">
<p>Proiect realizat de: Atomei Georgiana, Bacica Florin, Ciulei Virgil, Turcas Irina</p>
</footer>
</body>
</html>








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments